基于波束域实值HOSVD的双基地MIMO雷达测角算法
2021-02-16徐保庆剡熠琛任哲毅
徐保庆 剡熠琛 同 非 任哲毅
(西安电子工程研究所 西安 710100)
0 引言
多输入多输出(Multiple-input multiple-output, MIMO)技术最早的概念出现在通信领域中[1],近年来开始在雷达中进行应用。作为一种新兴体制的雷达,MIMO雷达本身有许多潜在的优势,尤其是在提高测量精度和分辨力[2]、抗干扰[3]以及杂波抑制[4]等方面。MIMO雷达处理维数高,从单基地MIMO雷达的角度来讲,虚拟孔径的拓展能够有效提高目标的空间角度分辨率,提高雷达抑制杂波的能力。另一方面,雷达有抗干扰的需求,多个发射波形能够有效增加波形被截获的难度。结合MIMO与双基地雷达的技术优势,可以形成一种新体制的双基地MIMO雷达。作为一种新体制雷达,双基地MIMO雷达已经成为雷达技术发展的一个新的契机[5-7]。双基地MIMO雷达利用发射和接收阵列信号具有的方向相关性,可实现对目标波离方向(Directional of departure, DOD)和波达方向(Directional of arrival, DOA)的有效估计,由于结合了双基地雷达和MIMO技术的优势,具有极大的发展潜力。
经典的Capon算法[8]、MUSIC算法和ESPRIT算法[9-10]是相控阵测角算法在双基地MIMO雷达体制下的延伸。子空间类算法需要对接收信号的自相关矩阵进行特征分解求得信号子空间或者噪声子空间。该类算法由于需要对子空间进行估计,因此会受到低信噪比或者低快拍的制约而出现较大的性能损失。另外,由于子空间类算法需要对矩阵进行特征分解,尤其是MUSIC算法需要进行两维的角度搜索,计算量往往很大,给雷达系统的实时处理造成很大的压力。在文献[11]中,G. Zheng等人将酉ESPRIT算法应用到双基地MIMO雷达中去。由于在实值转化的过程中应用了前后平滑技术[12],所以该算法在两个相干目标的情况下依然可以保持良好的测角性能。在文献[13]、文献[14]中,G. Xu和M.D. Zoltowski将空域滤波技术应用于相控阵雷达目标角度估计。常用的空域滤波器由离散傅里叶变换(Discrete Fourier Transform, DFT)矩阵生成,在实现数据维度降低同时可以提高目标的信噪比,空域滤波算法要求目标的大体空间位置已知。M.D. Zoltowski等人在文献[15]中又将酉ESPRIT算法拓展到了矩形阵列用于二维角度估计。文献[16]采用Bayes稀疏表示方法对双基地MIMO雷达多目标角度进行估计,这是CS技术在双基地MIMO雷达角度估计领域中的又一经典应用。上述算法都是基于矩阵信号模型,本身并没有利用双基地MIMO雷达接收信号的多维信息,测角精度存在一定的损失。
为了解决这个问题,D. Nion在文献[17]中首次提出平行因子(Parallel factor, PARAFAC)算法用于双基地MIMO雷达目标DOD和DOA估计。在该文献中,D. Nion首先给出双基地MIMO雷达的接收信号的PARAFAC张量模型,然后对其分解的唯一性条件进行讨论。在分解唯一性条件满足的情况下,各个目标的DOD和DOA信息就可以被单独提取出来,无需角度配对。常用的PARAFAC张量分解算法是交替最小二乘(Alternating least squares, ALS)算法[18],其本身是一种迭代算法,收敛速度取决于多方面原因,且并不保证收敛到一个稳定的点,尤其是在目标相干的时候,收敛速度非常的缓慢。虽然PARAFAC分解算法计算量大,但是不需要对子空间进行估计,因此在估计相关及邻近目标时具有独特的优势。Dimitri Nion等人在文献[19]中详细系统地讨论了多种结构的MIMO雷达系统的张量分解及角度估计方法,充分利用了观测信号的多维几何结构。由于张量分解技术在双基地MIMO雷达多目标角度估计中的独特优势,基于张量的角度估计算法也被应用于色噪声条件下的多目标角度估计[20]。M. Haardt采用高阶奇异值分解(Higher-order singular value decomposition, HOSVD)算法[21]对张量进行分解用于多维频率估计。高阶奇异值分解属于张量子空间类算法,用HOSVD分解得到的信号子空间比传统矩阵分解拥有更高的准确度,这也是该算法优于传统算法的主要原因。Y. Cheng等人提出多维奇异值分解算法[22],其本质上是HOSVD算法的在双基地MIMO雷达两维角度估计方面拓展。
本文提出一种波束域实值HOSVD双基地MIMO雷达测角算法,所提算法通过凸优化方法对发射和接收波束域矩阵进行优化设计,可以灵活设置波束主瓣宽度并抑制副瓣电平,发射和接收波束的主副瓣比能够得到很大提高,从而达到提高回波信噪比的目的。相比于传统的矩阵信号模型,通过HOSVD获得的张量信号子空间可以得到更高的测角精度,所提算法对发射和接收波束矩阵的结构进行设计以构造实值张量信号模型。最后,通过建立映射关系的方法对插值误差进行补偿,仿真结果验证所提算法的有效性。
这里给出文中常用符号的定义:(·)T、(·)H和(·)*分别表示矩阵或矢量的转置,共轭转置以及共轭;diag(·)表示对角化操作;vec(·)表示矢量化操作;⊕和⊙分别表示Kronecker积和Khatri-Rao积;Re{·}和Im{·}分别表示取矩阵或者矢量的实部和虚部;ΙM表示M×M维的单位矩阵;符号·表示外积,即(a·b·c)ijk=aibjck,其中(X)ijk表示张量X的第(i,j,k)个元素,ai表示向量a的第i个元素。
1 信号模型
1.1 张量运算
为便于读者理解,首先对本文用到的张量运算进行简单介绍。
1)定义1(张量的矩阵展开)

2)定义2(HOSVD分解)
对于N阶张量X∈CI1×I2×…×IN的HOSVD可以表示为
X=S×1U(1)×2U(2)…×NU(N)
(1)
其中,S∈CJ1×J2×…JN称为核心张量,模式-n矩阵U(n)是一个半正交矩阵,即U(n)HU(n)=IJn,且Jn≤In。图1给出了三阶张量HOSVD分解示意图。

图1 三阶张量的HOSVD分解
3)定义3(n-模式矩阵积)

X×mA×nB=X×nB×mA(m≠n)
(2)
X×mA×mB=X×m(BA)
(3)
[X×1A1×2A2×…×NAN](n)
=A(n)X(n)[An+1⊗…⊗AN⊗A1…⊗An-1]T
(4)
1.2 张量信号模型
假设M个发射阵元发射正交信号S=[s1,s2,…,sM]T∈CM×T,T表示单个脉冲的采样点数。在传统双基地MIMO雷达体制下,由于发射信号彼此完全正交,满足等式关系SSH=IM。假设远场目标的个数为K,第k个目标的DOD和DOA分别用θk和φk表示。一个相干处理间隔(Coherent processing interval, CPI)内的脉冲数为Q,则接收阵列接收到的第q个脉冲信号可以表示为
(5)

(6)
第k个目标的接收导向矢量为
(7)
式(5)中,Nq表示均值为零的高斯白噪声矩阵。将式(5)写成矩阵形式
Xq=BΛqATS+Nq
(8)
以上面的张量理论为基础,接下来对双基地MIMO雷达张量信号模型进行构建,由式(8)可知,双基地MIMO雷达第q个脉冲经匹配滤波后可以表示为
(9)
不同于矩阵信号模型的构造方法,我们将Yq,q=1,2,…,Q,沿着第三维进行排列,得到N×M×Q的张量信号模型X。根据文献[19],该张量信号模型可以表示为
(10)
其中,C=[d1,d2,…,dQ]∈CQ×K,K表示目标的个数,向量dk表示矩阵C的第k列。N∈CN×M×Q表示接收数据中的噪声项。
2 实值波束域HOSVD测角算法
2.1 张量运算

(11)


(12)

(13)

2.2 角度估计

(14)

(15)
在采用前后平滑技术后,张量Z是中心厄米特张量。

(16)

(17)
其中,矩阵Q为酉矩阵,当下标为偶数时具有式(18)形式为
(18)
当下标为奇数时具有式(19)形式
(19)

U[s]=S[s]×1Q1s×2Q2s
(20)


(21)
(22)

U[s]×1Kr,1×3Φr=U[s]×1Kr,2
(23)
U[s]×2Kt,1×3Φt=U[s]×2Kt,2
(24)

Φr=TΨrT-1
(25)
Φt=TΨtT-1
(26)
其中,T∈CK×K为实值非奇异矩阵。矩阵Ψr和Ψt为分别包含目标DOA和DOD信息的对角矩阵,其表达式分别为
Ψr=diag{tan(πsinφ1/2),
tan(πsinφ2/2),…,tan(πsinφK/2)}
(27)
Ψt=diag{tan(πsinθ1/2),
tan(πsinθ2/2),…,tan(πsinθK/2)}
(28)
根据式(23)和式(24)求解矩阵Φr和Φt,该问题可以转化为两个张量最小二乘问题
(29)
(30)
式(29)和式(30)等价于

(31)

(32)
求解式(31)和式(32)得到
(33)
(34)
假设矩阵Φr和Φt采用同时对角化方法得到的第k个的特征值分别用μk和γk表示,则第k个目标的DOD和DOA估计值为
(35)
(36)
2.3 误差补偿
(37)
(38)

3 仿真实验

图2 发射空域滤波器幅频响应
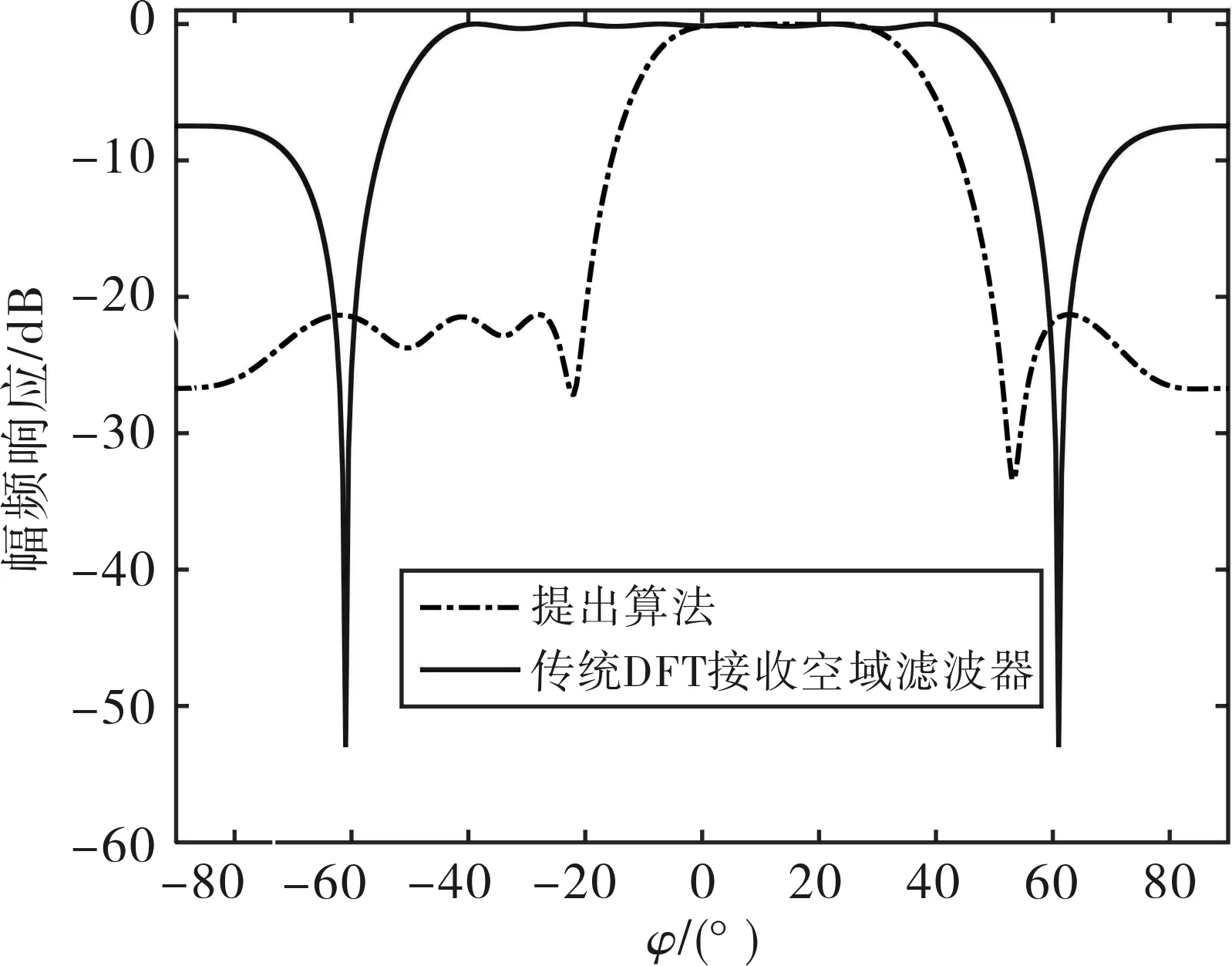
图3 接收空域滤波器幅频响应
仿真1:假设两个非相关信源分别位于(θ1,φ1)=(15°,5°)和(θ2,φ2)=(35°,25°)。提出算法与ESPRIT算法、酉ESPRIT算法、波束域ESPRIT算法、酉PARAFAC张量算法以及CRB进行比较。图4给出了RMSE随着信噪比的变化情况,此时的脉冲数固定为50。图5给出了RMSE随着脉冲数的变化情况,此时的信噪比固定为0dB。从两幅图中可以看出,基于HOSVD和PARAFAC分解的空域滤波测角算法在低信噪比时要优于其它实值处理算法。

图4 非相关信源RMSE随信噪比变化情况

图5 非相关信源RMSE随脉冲数变化情况
仿真2:假设两个相关信源分别位于(θ1,φ1)=(15°,5°)和(θ2,φ2)=(35°,25°),相关系数为0.99。图6给出了两个相关信源情况下RMSE随着信噪比的变化情况,此时的脉冲数固定为50。图7给出了两个相关信源情况下RMSE随脉冲数的变化情况,此时的脉冲数依然固定为50。从图7中可以看出,ESPRIT算法在处理两个相关信源时存在很大的性能损失,这是因为ESPRIT算法没有对双基地MIMO雷达的接收数据进行前后平滑处理。

图6 两个相关信源情况下RMSE随信噪比变化情况

图7 相关信源检测概率随信噪比变化情况
4 结束语
本文将改进的空域滤波方法与张量分解方法相结合,在此基础上对双基地MIMO雷达角度估计算法进行了研究,提出了波束域实值HOSVD双基地MIMO雷达测角算法。由于改进的空域滤波器能够灵活控制波束宽度和抑制旁瓣电平,能提高空域滤波器主副瓣比,而张量分解方法能够利用双基地MIMO雷达接收数据的多维信息,提高信号子空间估计精度。由于从阵元域到波束域的转换,改变了信号子空间的旋转不变结构,必须对估计结果进行误差补偿。仿真实验验证了本文算法的有效性。