无人机航测技术在海岸地形测量中的应用研究
2021-02-15崔坤生
崔坤生
(福建省港航勘察科技有限公司,福建 福州 35009)
0.引言
近海岸的地形受潮流、人类活动影响大,水深浅、底质软,地形变化周期短。常规的全站仪、GNSS测量和船载声呐水深测量的测量方法效率低、精度差、产品单一,在近岸浅滩、岛礁等诸多区域受客观因素的影响,测绘成果精度难以保证,现场作业人员安全风险高。
近年来,随着无人机航测系统硬件和软件处理技术迅猛发展,无人机航测已成为一种新兴的测量手段,以其操作简单、外业工作量小、效率高的优点,深受各行各业的青睐,在测绘领域已广泛应用于空间规划、海洋环境监测、国土资源调查、城市测绘、应急保障等方面[1]。国内外学者对无人机航测技术在陆地地形测量方面研究较多,陈玲[2]等研究了低空无人机航摄系统在四川地形测绘中的应用;李军[3]等对无人机航测1∶1000测绘精度进行了研究,但在水陆交界的海岸地形测量尤其是潮间带(滩涂)测量方面应用研究较少。本文从航测系统构成、生产流程、精度控制等方面进行分析研究,并结合工程实例对成果精度进行检验和评价,验证了无人机航测技术在海岸地形测量中的可靠性,为同类项目应用提供借鉴。
1.无人机航测系统构成及生产流程
1.1 无人机航测系统组成
无人机航测系统包括外业航测系统和内业数据处理软件系统两大部分。外业航测系统是以无人机作为飞行平台,影像传感器作为任务设备的低空影像获取系统。常用的无人机飞行平台分为固定翼和多旋翼两类,集成了飞控系统、传感器系统、GNSS定位系统、POS定位定姿系统等。影像传感器包括高分辨率CCD数码相机、轻型光学相机、近红外相机等。
内业影像处理软件是空中三角测量计算能力和成图精度的关键,目前国内常用的无人机影像处理软件主要有ContextCapture、Pix4Dmapper、DPGrid、PHOTOMOD、Inpho、IPS等,从成图精度来看,以上软件均能满足正射影像处理和大比例尺成图的要求[4]。
1.2 无人机航测生产流程
无人机航测生产流程主要分为测区资料收集、航线规划、像控点采集、外业航空摄影、影像质量检查、空三加密、DEM和DOM生产、内业立体测图、外业调绘、数据检查验收等。生产流程(如图1所示):
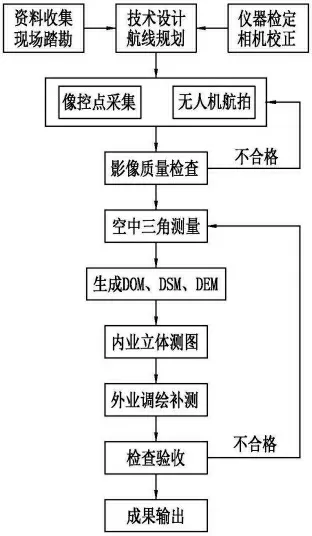
图1 无人机航测生产流程图
2.无人机航测关键技术分析
无人机航测技术核心的原理是求解地面点、摄影中心点和像点三点的共线方程,主要误差来源包括像片的地面分辨率和影像质量、相机镜头畸变、像片外方位元素测量精度。要提高航测成果精度,必需保证必要的测量条件。
2.1 获取高精度POS数据
高精度POS数据是像片6个外方位元素求解的基础,无人机搭载的GNSS模块运用网络RTK实时差分技术进行连续观测,同时记录相机曝光瞬间的时间。利用软件解算获取每张像片的高精度位置数据和POS数据。航测区域内要求网络RTK信号稳定、尽可能实现相机实际曝光时间与机载GPS记录的曝光时间同步。
2.2 准确获取相机镜头畸变
无人机搭载的轻型航测相机通常为非量测型相机,存在镜头畸变较大的光学缺陷,对像片边缘部分影响极大。因此,航测相机应定期进行参数检核,主要包括相机焦距、主点偏移量和畸变系数。根据《低空数字航空摄影规范》(以下简称《规范》)要求,主点坐标中误差不应大于10μm,相机主距中误差不应大于5μm,残余畸变差不应大于0.3像素。本文实例中使用的相机为新购买相机,出厂时已检定,参数符合规范要求。
2.3 提高地面分辨率和影像质量
地面分辨率是成果精度的关键,航摄影像质量直接影响影像判读准确度。根据测图比例尺的要求,按照式(1)计算飞行高度。

式中,h表示飞行高度;f表示镜头焦距;a表示像元尺寸;GSD表示地面分辨率。
为提高影像质量,应选用高分辨率相机、降低航高、提高地面分辨率。根据《规范》规定,测图比例尺1∶500地面分辨率≤5cm,测图比例尺1∶1000地面分辨率为5~8cm。
2.4 其他影响因素
除以上3点因素外,影响航测成果精度的其他因素包括天气、像片重叠度、曝光时间等。
(1)天气因素主要包括风、雾、光照强度等。当风速过大时,会造成无人机飞行速度和姿态变化大,导致像片扭曲大、倾角大;能见度低、光线不足则直接导致像片的清晰度和分辨率达不到要求。
(2)航摄像片保持足够的重叠度是保障成果精度的关键。由于相机畸变客观存在,所以应尽可能利用像片中心部分。提高重叠度可以增加内业空中三角测量可利用的连接点数量,降低像片畸变纠正过程中的影像纠正误差。
(3)像点位移会降低影像解析能力,影响判读精度。为减少像点位移应尽量缩短曝光时间。《规范》规定像点位移一般不应大于1个像素。因此,外业航测中要适当降低飞行速度,缩短曝光时间以提高影像质量。
综上所述,选择高质量的相机、高精度的POS、低速度稳定性好的无人机飞行平台、适宜的飞行条件是开展无人机航测工作的基础。通过航线优化设计、合理布设像控点、增加像片重叠度或增加构架航线是提升航测成果精度的重要手段。
3.工程实例
以福建省沿海某市港口岸线规划利用项目为例,测区位于河流入海口附近,地势平坦,养殖多,潮差较小,潮间带宽约100m。考虑到传统测量方式无法覆盖全区域,尤其是干出滩内分布有稀疏的红树林、渔网,人工测量效率极低。除河流中心沟槽需进行水深测量外,其余部分采用无人机航测获取平面和高程,测量面积9.2km2,按1∶1000测图比例进行航摄,测量范围(如图2所示):

图2 航测范围
3.1 航摄设计与实施
3.1.1 航测系统介绍
本次航测采用大疆经纬M300RTK多旋翼无人机搭载赛尔6100航测相机,高精度差分GNSS模块,能够提供高精度定位数据和POS数据。飞机重量6.3kg,最大飞行速度23m/s,最长飞行时间55min,最大可承受15m/s风速,最大信号有效距离15km,具有自动航线规划和一键起飞功能。搭载的赛尔相机全画幅6100万像素,地面最小分辨率1.5cm。飞机标称水平定位精度±(1cm+1ppm),垂直定位精度±(1.5cm+1ppm)。
3.1.2 像控点布设与测量
像控点布设采用区域网布点方案,布点间距综合考虑成图精度、现场地形特点以及施测条件等因素。测量前,在测区范围内平坦区域均匀布设18个像控点,位置分布(如图3所示):

图3 像控点位置图
布设的像控点能有效控制目标区成图范围,并用校正后的GNSS-RTK采集每个像控点的平面坐标及高程。
3.1.3 航测实施
航摄时间选择天气晴朗、低平潮期间进行,利用飞控软件设计飞行航线,分4个架次飞行,航摄面积9.2km2,航摄参数(如表1所示)。航摄完成后,检查像片数量、质量,POS数据完整性,像片的重叠度、倾斜角、旋偏角、航高差等参数。

表1 本项目航摄参数表
3.2 数据后处理
将外业像片、像控点坐标、POS数据及相机参数导入Pix4Dmapper软件中进行自动计算,处理流程包括初始化处理、点云编辑、DSM和正射影像生产3个步骤(如图4所示)。Pix4Dmapper软件处理技术利用影像同名点自动相关技术提取同名地物点,采用光束法区域网平差,并引入外业采集的像控点三维坐标进行约束平差。在影像模糊、比例尺变化差异较大处通过人工调节图像之间连接点的数量以提高精度。数据处理结束后,对公共像控点和检查点进行误差统计。
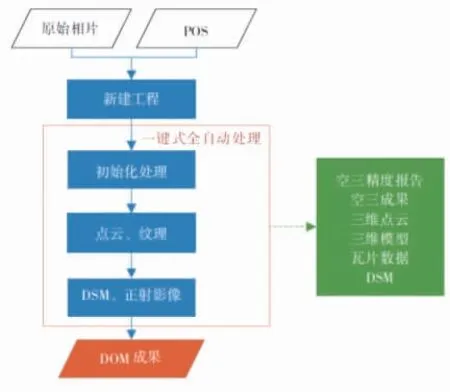
图4 Pix4Dmapper软件处理流程图
本次航测影像平面坐标和像控点平面坐标均采用WGS84坐标系,高程采用1985国家高程基准。根据软件处理结果,平均分辨率为4.58cm,每个图像中含有25200个特征点,相机参数相对偏差1.13%,每张校准图像匹配特征点中数为10457个,影像配准中含有18个地面控制点,像控点点位误差分布(如图5所示),精度统计(如表2所示),各项误差均在允许范围之内。

表2 像控点精度统计表 单位:cm

图5 像控点点位误差分布图
3.3 成果精度检验及分析
本次航测精度采用人工地面测量进行检验。航测前,人工手持同等精度的GNSS-RTK在测区内平坦地区实测房屋拐角、道路交叉点、电杆等明显地物作为检查点,同时采集平面坐标和高程。在潮间带采用人工测量4条检查线的高程,检查线垂直海岸线,点间距为10m,共采集117个高程点;在陆地区域共采集49个平面和高程检查点。
将Pix4Dmapper软件生成的DSM和正射影像导入立体测图软件中恢复立体模型,在模型中加载人工测量检查点的展点位置,测量出检查点的三维坐标(X,Y,Z)。将人工RTK测量的检查点坐标作为真值与无人机航测成果进行比较,根据式(2)计算中误差Ms,结果(如表3所示):
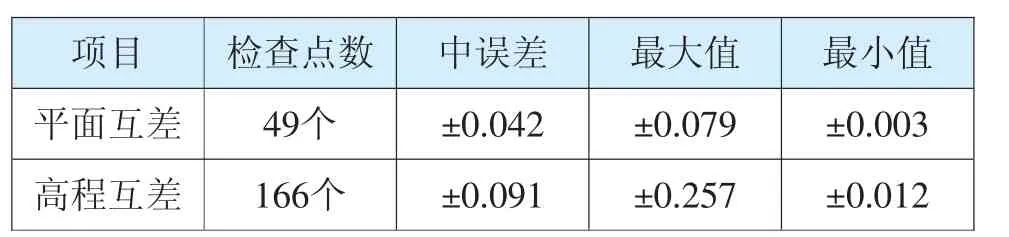
表3 人工RTK测量检测互差 单位:m

式中:Δ为真误差;n为观测点数。为更好地了解数据精度,本次也对坐标互差的分布区间做了统计(如图6所示):

图6 平面及高程互差分布区间图
由检查点检验统计情况可知,陆域检查点的平面坐标点位中误差为±0.042m,最大值为0.079m。高程中误差为±0.091m,最大值为0.257m,其中大于0.2m的点数仅有4个,占检查点总数的2.4%。高程比对结果显示,互差较大的区域处于滩涂分布集中的测区,该区域像控点布设较少,且影像反射强烈。
根据《水运工程测量规范》规定:地形测量重要地物点的点位中误差为图上±0.6mm,高程中误差小于1/3等高距。两项指标均小于规范规定的1∶1000及以下大比例尺地形图的限差要求。
4.结论
低空无人机航测技术流程简单、易操作,不仅可以很好地解决海岸地形测量尤其是潮间带测量的难题,比传统的测绘方法速度快、效率高,而且能够同时提供高精度正射影像、DEM和DLG产品,精度满足1∶1000及以下大比例尺海岸测量的要求,但仍存在一些不足:
(1)无人机航测不能完全替代野外作业。海岸测量受潮汐影响大,在红树林和水草等植被覆盖区、建筑密集区、水淹区以及低潮期间仍无法航测的区域,仍需外业实地测量和水深测量进行补充;
(2)相比于陆地无人机航测,海岸逐渐向海洋延伸靠近水域,像控点的布设是一项非常困难的工作,也是影响成果精度的关键,尤其滩涂区域航测像控点布设工作量会成倍增加;
(3)海岸区域地貌特征以滩涂、沙滩、岩石为主,地物要素单一,影像反差较小[5],空中三角测量采集影像特征点比较困难,离水域越近精度越低;
(4)无人机航测对天气要求较高,沿海地区天气多变,作业窗口小,且鸟类众多,对无人机飞行安全会造成一定的影响。
