基于大数据的遥感影像高亮目标定位方法
2021-02-15胡盛滨
胡盛滨
(浙江省测绘科学技术研究院,浙江 杭州 311100)
0.引言
近年来,随着对地观测技术的迅速发展,获取遥感影像数据的方式发展到了一个新的阶段,出现了大量重访周期短、空间分辨率高的成像卫星,能够提供侦察不同地形环境、监视敏感目标的海量可分析数据[1]。然而在这种技术的发展中,成像卫星重访周期的缩短以及高分辨率的提高,都使待处理的卫星遥感影像数据呈现爆炸性增长趋势,为高亮目标的定位问题带来了很大困难。面对遥感影像数据的几何式增长,仅通过人工方式对高亮目标进行定位存在很大问题,包括人力与时间成本较高、判读效率较低、获取与处理信息的周期较长等,同时这种方式还会受到操作人员自身主观认知的影响,无法满足实际需求。而通过机器进行定位,现阶段也存在准确度不高的问题。因此如何在大量遥感影像数据中进行高亮目标的准确定位,是一个重要的研究课题。
对于遥感影像高亮目标定位问题,目前研究成果已经十分丰富。早期的高亮目标定位主要是通过视频图像序列来实现。现阶段的高亮目标定位则主要依靠像素灰度、对象先验信息等来实现,主要是针对光学遥感影像。在研究中应用了多种方法,包括高斯尺度空间、稀疏表示、图像拼接技术、轮廓提取算法、特征提取算法、滑动窗判决法等,这些方法的应用有效提升了目标定位的准确度。为获取准确度更高的高亮目标定位结果,综合目前取得的研究成果,对遥感影像高亮目标定位问题进行更加深入地研究,提出一种基于大数据的遥感影像高亮目标定位方法。
1.基于大数据的遥感影像高亮目标定位方法设计
1.1 数据处理
基于大数据中的基础架构支持技术、数据处理技术以及数据交互与展现技术实施遥感影像的数据处理,使用的基础架构为云计算平台,通过该平台获取原始遥感影像数据。
使用的数据处理技术为系统集合校正、辐射校正以及零级处理等数据预处理技术以及多种数据深加工处理技术。
使用的数据交互与展现技术为RAWGraphs可视化工具,通过该工具实施遥感影像数据的信息提取[2]。
整体数据处理过程(如图1所示):

图1 遥感影像整体数据处理过程
1.2 目标检测
为实现遥感影像高亮目标检测,首先需要实施图像分割。使用的图像分割方法为多尺度分割法,具体分割流程如下:
(1)将任意像素点当作起始点;
(2)对起始点像元邻接的具有与起始点相同或相似像元性质的像素点进行寻找,并对寻找的像素点进行归并,使其合并到同一区域内;
(3)将步骤(2)中的区域当作新的像素起始点,对步骤(2)中的操作进行重复执行,直到满足条件的全部像素点被归并至同一区域中,完成图像的分割。
所获取的分割结果是将遥感影像中零散分布的背景区域、种类不同的复杂背景整合为多个区域多边形。在该过程中,需要将归并至同一区域中的像元保持在最小的异质性上。
接着提取分割遥感影像中的感兴趣区域,具体提取步骤(如图2所示):

图2 遥感影像中的感兴趣区域具体提取步骤
然后实施遥感图像的复杂背景抑制,通过灰度形态学重建实现遥感影像高亮目标的检测[3]。具体步骤如下:
(1)对全色图像实施均值聚类滤波并抑制其高亮背景;
(2)对多光谱图像实施均值聚类滤波并对其水体、建筑物、植被背景进行分离;
(3)对不相关背景进行充分抑制以减少虚假目标;
(4)实施灰度形态学重建,获取检测背景;
(5)通过背景差分法对高亮目标进行检测;
(6)实施虚景去除处理。
通过以上步骤实现遥感影像高亮目标检测。
1.3 目标识别
依据由粗到精的顺序实施遥感影像高亮目标识别。通过级联AdaBoost算法快速提取遥感影像上的少量候选高亮目标区域,作为粗略的目标识别过程。
在粗略的目标识别过程中,使用的级联AdaBoost分类器是多层递进结构。在分类感兴趣区域时,只有被上一级分类器直接判定为高亮目标区域,该区域才能被送入下一级分类器中进行处理;未被判定为高亮目标区域时,该区域将会被直接拒绝。因此只有和目标相似的少数区域才能进入最后一级分类器中被识别,这种方式可以大幅减少精细识别时的计算量。
针对候选高亮目标区域对深度卷积神经网络的对应特征进行提取,并在SVM分类器内实施特征的分类,利用非极大值抑制对最终结果进行求取,实现遥感影像高亮目标识别[4]。将该过程作为精细识别目标的过程。
1.4 目标定位
根据载体平台的对应成像特性,将高程DEM数据与地理信息数据作为辅助,对有理函数模型进行修正,将目标识别结果的中心像素点坐标作为定位基础,实现少量地面控制点或无地面控制点情况下的高亮目标精确定位。
通过手动选择多光谱图像与遥感全色图像中的连测点来确定精确、少量的地面控制点[5]。利用遥感卫星的GCPs原始数据对高亮目标的地面空间初始坐标进行计算,在模型中代入选择的地面控制点,实现模型的改善与修正。操作步骤具体如下:
(1)在目标识别结果中对任意一个四边形区域进行选择,用(A1,B1,C1,D1)来表示。该区域中有与A1、B1、C1、D1四个点相邻近的四个点:A2、B2、C2、D2。以有理函数模型为依据,对A2、B2、C2、D2这四个点的地面坐标进行计算,用A2(X1,Y1)、B2(X2,Y2)、C2(X3,Y3)、D2(X4,Y4)来表示[6];
(2)通过DEM数字高程数据对A2、B2、C2、D2这四个点的对应高度Z值进行获取。此时,这四个点的对应三维坐标可以表示为A2(X1,Y1,Z1)、B2(X2,Y2,Z2)、C2(X3,Y3,Z3)、D2(X4,Y4,Z4);
(3)通过A2、B2、C2、D2这四个点的地面坐标和有理函数模型对这四个点对应的像面坐标进行计算,分别用a2(I4,J1)、b2(I2,J2)、c2(I3,J3)、d2(I4,J4)来表示;
(4)通过A2、B2、C2、D2这四个点的对应的地面坐标A2(X1,Y1,Z1)、B2(X2,Y2,Z2)、C2(X3,Y3,Z3)、D2(X4,Y4,Z4)和对应的像面坐标a2(I1,J1)、b2(I2,J2)、c2(I3,J3)、d2(I4,J4),构建一个物方和像方间二维坐标系关系的变换式,具体如式(1)所示:

式(1)中,X、Y分别为物方二维坐标系的两个坐标轴;f(I,J)为(I,J)这一点的横坐标变换函数;g(I,J)为(I,J)这一点的纵坐标变换函数;a1、b1、c1分别为地面坐标系数;a2、b2、c2分别为像面坐标系数;
(5)对于这一点(I,J)对其对应的物方二维坐标(X,Y)进行计算;
(6)对地面坐标中点(X,Y)对应的高程数据进行查找,获取点(X,Y)的对应高度值Z,用(X,Y,Z)表示该点的对应三维坐标;
(7)通过有理函数模型,利用(X,Y,Z)这一三维坐标对(X,Y)的对应地面坐标进行计算,用(I′,J′)来表示。由于第(4)个步骤中变换二维坐标系时没有对物方的坐标进行变换,此时计算获得的(I′,J′)像方坐标会与(I,J)点的坐标存在一定误差;
(8)对(I,J)与(I′,J′)之间的差值进行计算,具体计算如式(2)所示:

(9)对上述步骤进行迭代,直到差值小于某门限,再次获取(I,J)对应物方坐标(X,Y,Z);
(10)当不满足条件时,通过差值ΔI与ΔJ实施校正,具体如式(3)所示:

式(3)中,ΔX为横坐标校正补充值;ΔY为纵坐标校正补充值。
通过以上步骤实现遥感影像高亮目标定位。
2.实验与分析
2.1 实验数据
对于设计的基于大数据的遥感影像高亮目标定位方法,分别在海、陆区域背景下实施该方法的测试与分析。
在实验中,使用的实验数据集是GeoEye-1卫星遥感影像数据中的海、陆区域背景数据。对其进行重采样,将图像分辨率提升至0.5m。在实验数据集中,车辆类高亮目标图像的尺寸分别为3000×3000像素与2000×2000像素,舰船类高亮目标图像的尺寸分别为7500×15000像素与8000×8000像素。
实验数据集中的图像具体(如图3所示):

图3 实验数据集中的图像
分别针对车辆类高亮目标与舰船类高亮目标,通过5个场景实施高亮目标检测与定位实验。在海、陆区域背景下分别测试设计方法的目标检测与目标定位性能。
2.2 舰船类高亮目标检测与定位实验结果
舰船类高亮目标共有两个实验场景,对于舰船类高亮目标,使用设计方法进行目标检测的实验结果(如表1所示):

表1 舰船类高亮目标检测实验结果
根据表1舰船类高亮目标的目标检测实验结果,基于大数据的遥感影像高亮目标定位方法在两个实验场景中都能实现较为准确地目标检测,目标检测准确率在第二个场景中达到了100%。
在两个舰船类高亮目标的实验场景中,设计方法的目标定位实验结果(如图4所示):
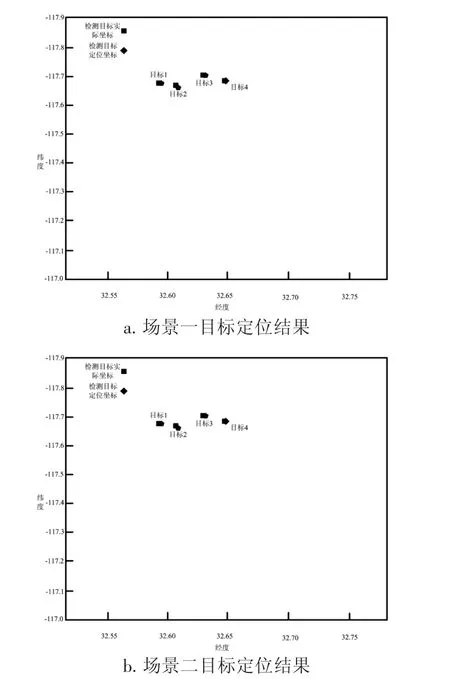
图4 两个实验场景中设计方法的目标定位实验结果
根据图4的目标定位实验结果可知:在场景一中,设计方法对于检测目标的目标定位较为准确;在场景二中,设计方法对于检测目标的目标定位同样较为准确。说明设计方法对于舰船类高亮目标而言有着准确的目标定位性能。
2.3 车辆类高亮目标检测与定位实验结果
车辆类高亮目标共有三个实验场景,对于车辆类高亮目标,使用设计方法进行目标检测的实验结果(如表2所示):

表2 车辆类高亮目标检测实验结果
根据表2车辆类高亮目标的目标检测实验结果可知:设计方法在三个实验场景中都能实现较为准确地目标检测,目标检测准确率在第三个场景中达到了100%。
在三个车辆类高亮目标的实验场景中,设计方法的目标定位实验结果(如图5所示):
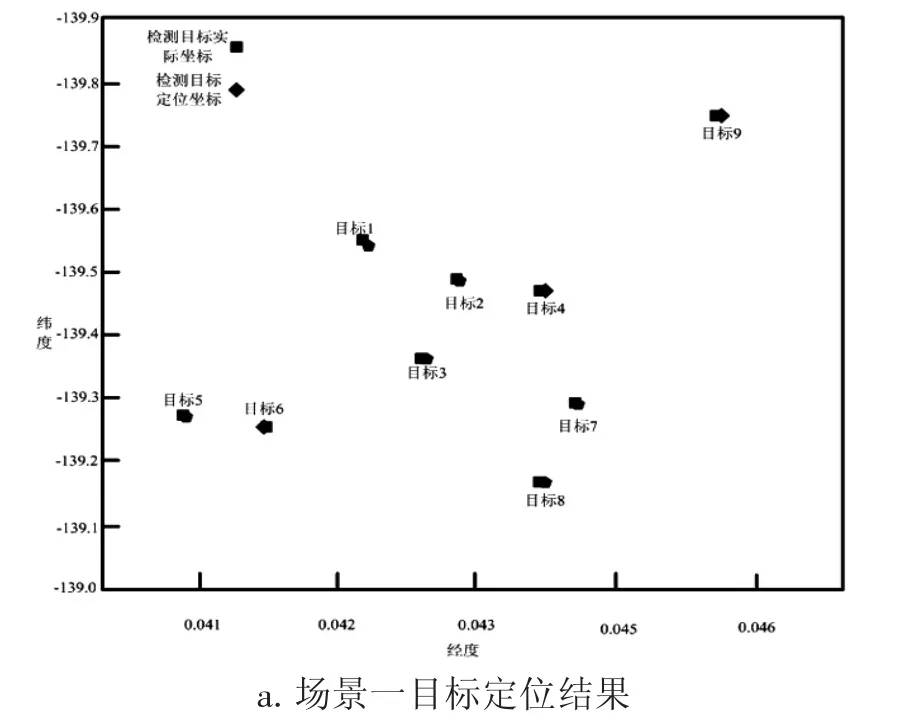
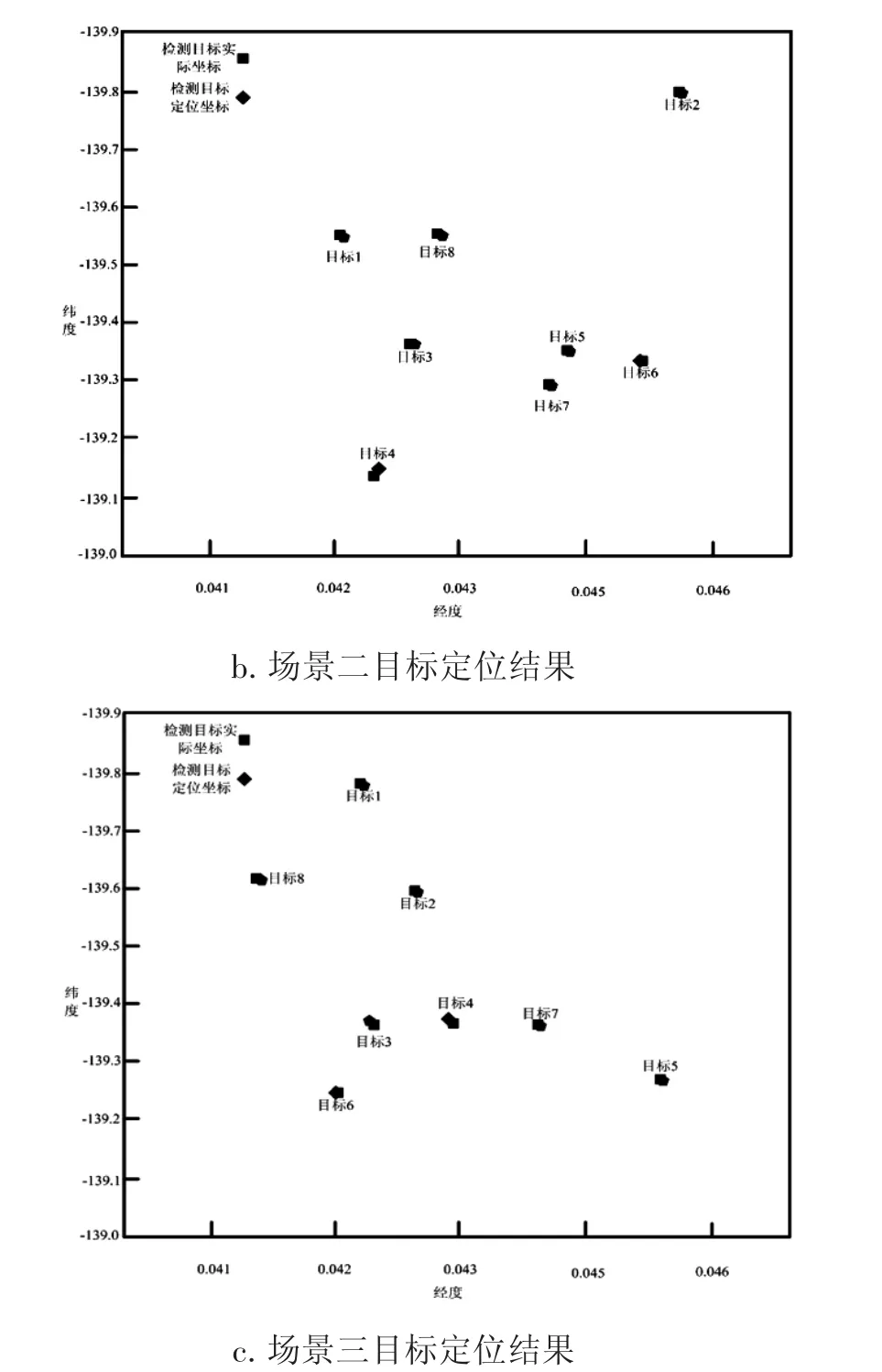
图5 三个实验场景中设计方法的目标定位实验结果
根据图5的目标定位实验结果可知:在三个车辆类高亮目标的实验场景中,设计方法的目标定位均较为准确,说明设计方法对于车辆类高亮目标而言有着准确的目标定位性能。
3.结束语
随着光学遥感分辨率的提升以及图像处理技术的不断发展,遥感影像高亮目标定位问题越来越受到重视。在该问题的研究中应用了大数据中的基础架构支持技术、数据处理技术以及数据交互与展现技术实施遥感影像的数据处理,实现了精准的遥感影像高亮目标定位,取得了一定研究成果。
