基于准零刚度的被、主动混合控制研究
2021-02-05陆新征
黄 伟, 徐 建, 陆新征
(1.国机集团科学技术研究院有限公司 国机集团工程振动控制技术研究中心,北京 100050; 2.清华大学 土木水利学院,北京 100084; 3.北京起重运输机械设计研究院,北京 100007; 4.中国机械工业集团有限公司,北京 100080)
精密装备及精密加工制造离不开微振动控制技术作为保障。微振动控制的难点即是使隔振体系达到较低的固有频率,以尽可能滤除更宽频带的有害振动,从而获得良好的控制效果。钢弹簧隔振体系在设计低频(如1 Hz)时,其静变形达248 mm,实际工程中不易使用;双腔室气浮隔振体系需要持续不断地提供外界气源,且气源配置、气路分配、气压优化、漏气控制等都需详细设计。
近年来,基于正负刚度并联的准零刚度研究成为热点,诸多学者开展了关于准零刚度体系的设计和研究[1-5]。本文对某正负刚度并联实现准零刚度体系进行研究,并在有限元分析环境,开展了被、主动混合控制研究。
1 负刚度原理
负刚度体系是实现准零刚度的关键,利用受压连杆处于不稳定的平衡状态可形成负刚度[1,6-7],如图1所示。图1中2根等长L的连杆中间铰接,另一端受到水平预紧力Fp的顶撑作用,连杆中部铰接处受外部集中力Fv作用(负载),一定状态下体系可达到平衡态,Δ为无负载作用下的铰接处竖向变形。
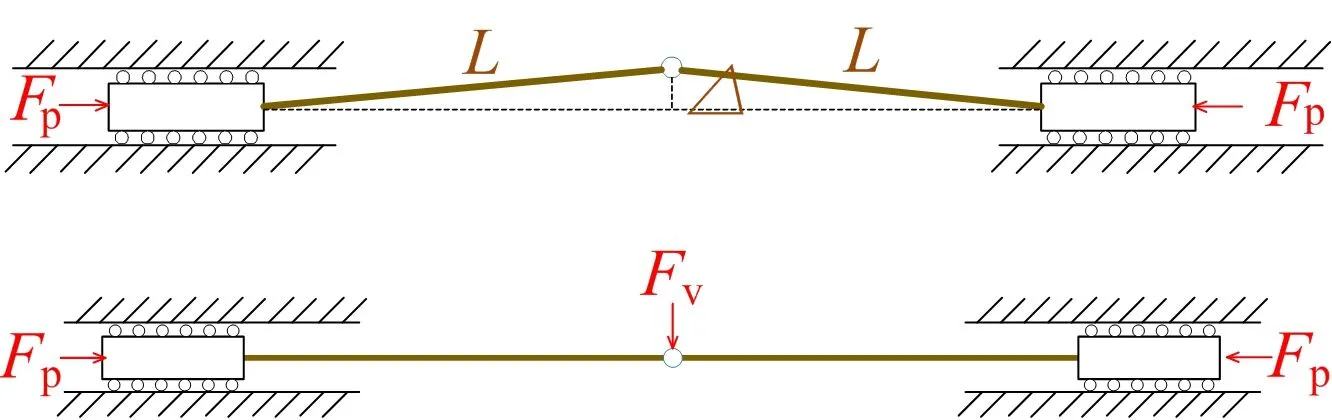
图1 负刚度连杆机构
体系竖向刚度计算公式为:
(1)
其中,df/dz为刚度计算算子,分母、分子分别反映力与变形的变化。实际工程中,预紧力Fp可由钢弹簧提供,即事先对钢弹簧施加力产生变形后再通过螺母顶撑预紧,如图2所示。

图2 弹簧预紧型负刚度连杆机构
设水平弹簧刚度为kh,弹簧预压后的初始变形为Δh,则使体系达到平衡状态的外力Fv为:
(2)
此时,体系竖向刚度计算公式为:
(3)
将(3)式改写为无量纲的刚度表达式,即
(4)

负刚度特性变化曲线如图3所示。
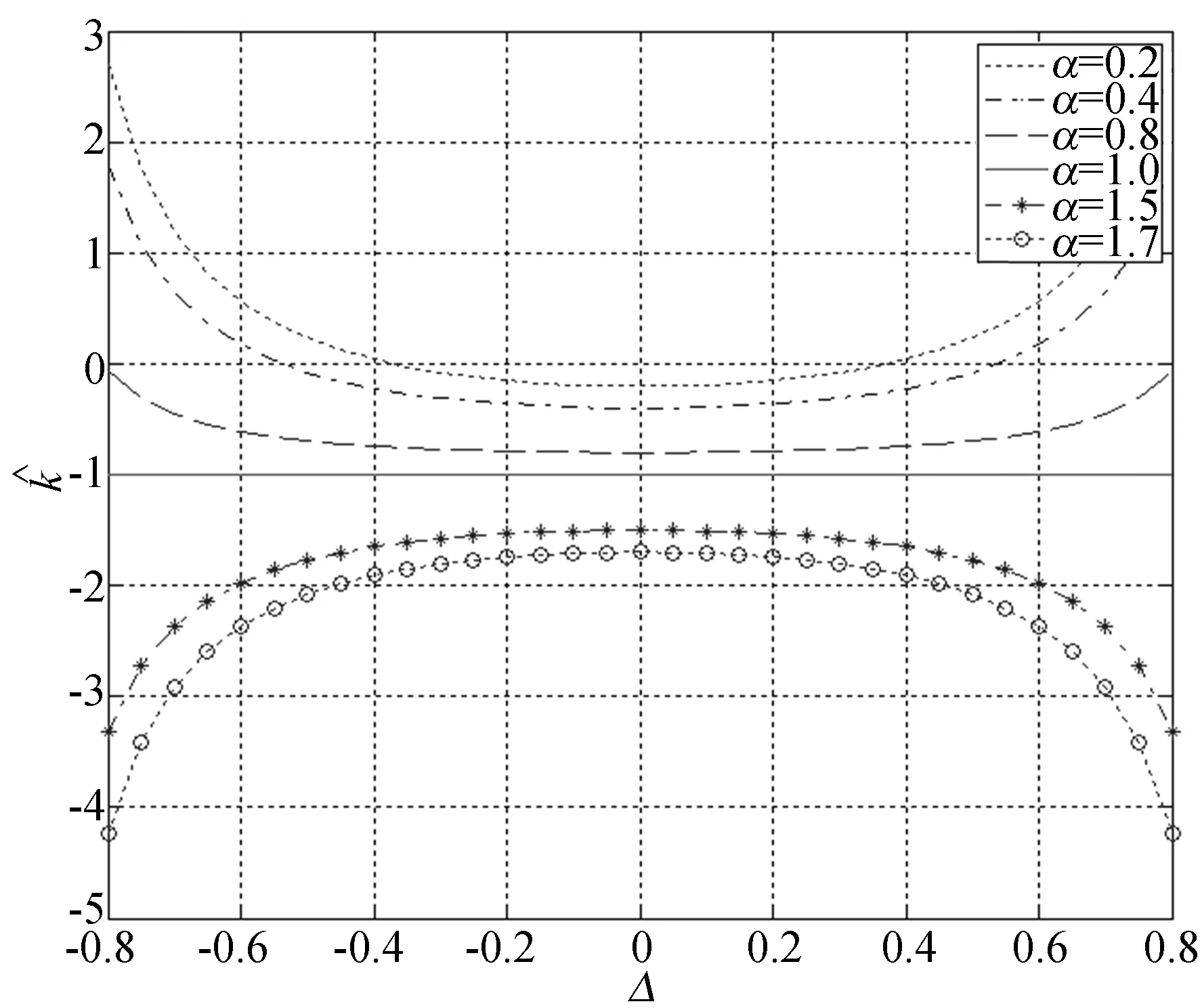
图3 负刚度特性变化曲线
从图3可以看出,当α>0.8时,体系表现为负刚度特性;当α=1时,体系为负刚度恒值;当α>1时,体系始终表现为负刚度,且刚度非线性随着α的增大而增大。因此,在设计准零刚度体系时,应保证α≥1,即Δh≥L。
2 正负刚度并联的准零刚度
由第1节描述可知,当α取某值时,体系表现为负刚度特性,当竖向并联一个刚度kv的正刚度弹簧,如图4所示,理论上kv≈-Kv时,体系接近0刚度(图4),并可通过调节弹簧刚度kv及竖向预紧螺母实现弹簧初始变形,以实现对不同负载质量的支撑。
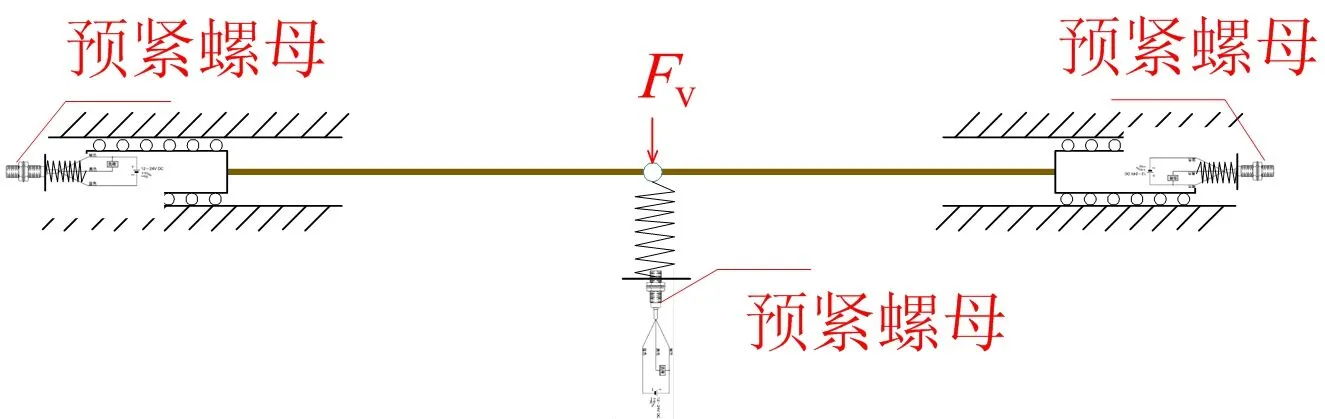
图4 正负刚度并联实现准零刚度
3 基于准零刚度的被动控制研究
在ANSYS 15.0中进行有限元分析,杆系用beam188模拟、弹簧单元用combin14模拟、两杆铰接用cp模拟边界条件[8],计算流程依次为:依据第1节计算模拟参数、有限元建模、施加预紧力并进行静力分析(激活预应力)、模态分析(激活预应力),如图4所示的正负刚度并联体系,圆杆直径D=0.04 m,杆长L=0.25 m,负载质量m=8.36 kg(Fv=83.6 N),水平向弹簧刚度kh=200 N/m,施加在该两水平弹簧的预紧压力Fp=100 N,竖向弹簧刚度kv=9.19 N/m。有限元模型如图5所示。经计算该体系竖向基频为1.08 Hz,第一阶振型如图6所示,反映正负刚度并联后的竖向整体振型,即实现准零刚度后的期望振型与固有频率。对该体系施加幅值为1 m/s2的白噪声竖向加速度,时长10 s,提取负载处节点的位移响应,其FFT结果如图7所示。

图5 准零刚度体系有限元模型
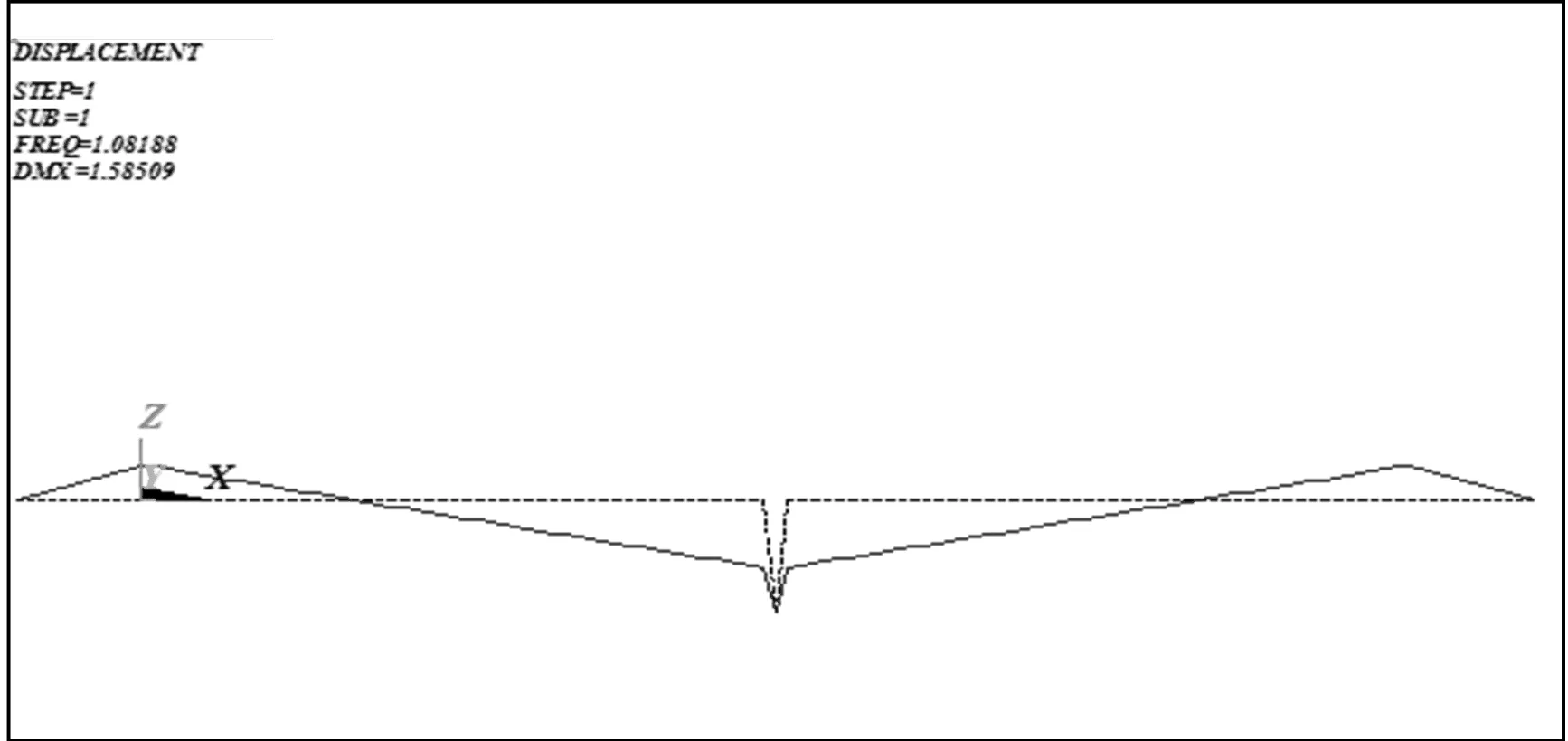
图6 一阶振型及准零刚度实现的低固有频率(1.08 Hz)
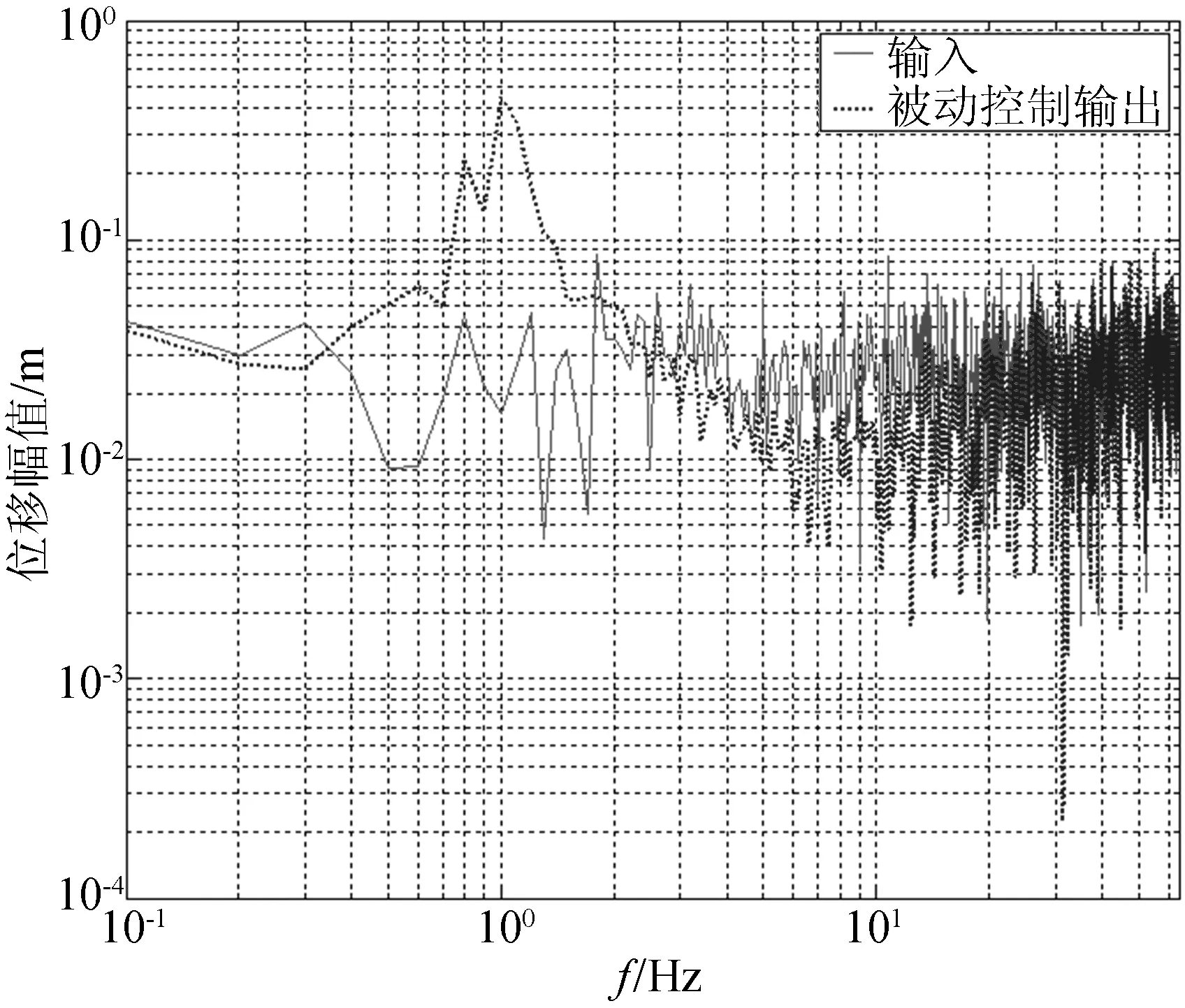
图7 准零刚度被动控制频域响应
4 基于准零刚度的被、主动混合控制研究
从图6、图7可以看出,正负刚度并联可以使体系达到较低的固有频率,为了进一步改善振动控制效果,在此基础上,考虑被、主动混合控制,如图8所示,主动控制采用PID控制[9-10],比例、积分、微分增益分别为-60、-5、-5。本研究通过在ANSYS/APDL环境中编程嵌入主动控制程序,设计程序可以根据瞬态计算结果实时抽取控制节点响应并反馈给控制器PID,以实现混合控制,流程如图9所示。本研究中的传感器拾取点以及作动器作用点均选取两杆中间铰接处。混合控制效果如图10所示,可见被、主动混合控制体系可以全频段抑制振动,且可以有效削除共振峰,比被动控制效果大幅改善。作动器出力如图11所示,图11中部分曲线放大结果如图12所示。
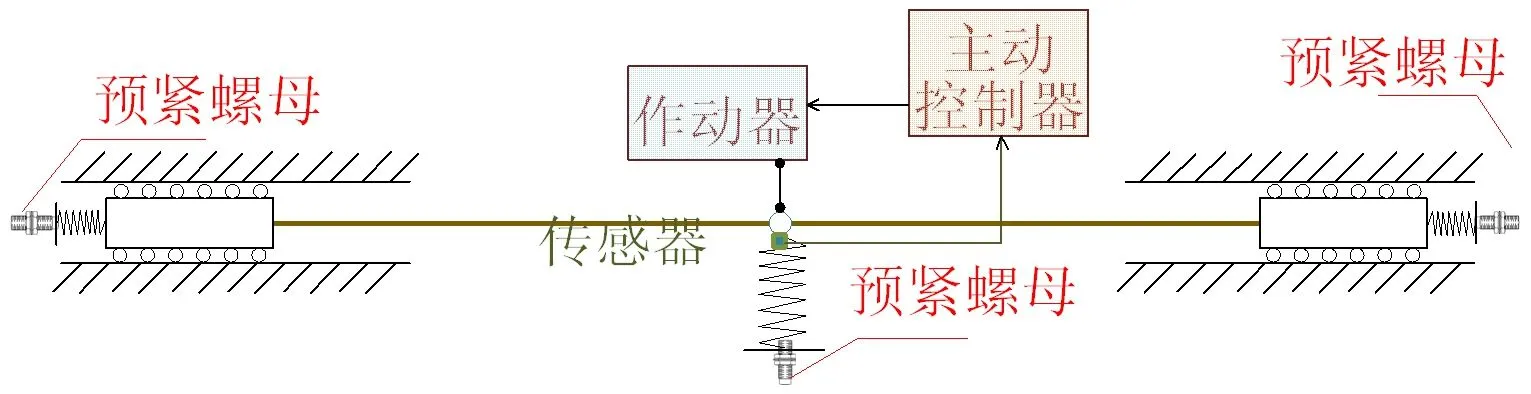
图8 基于准零刚度的被、主动混合控制体系
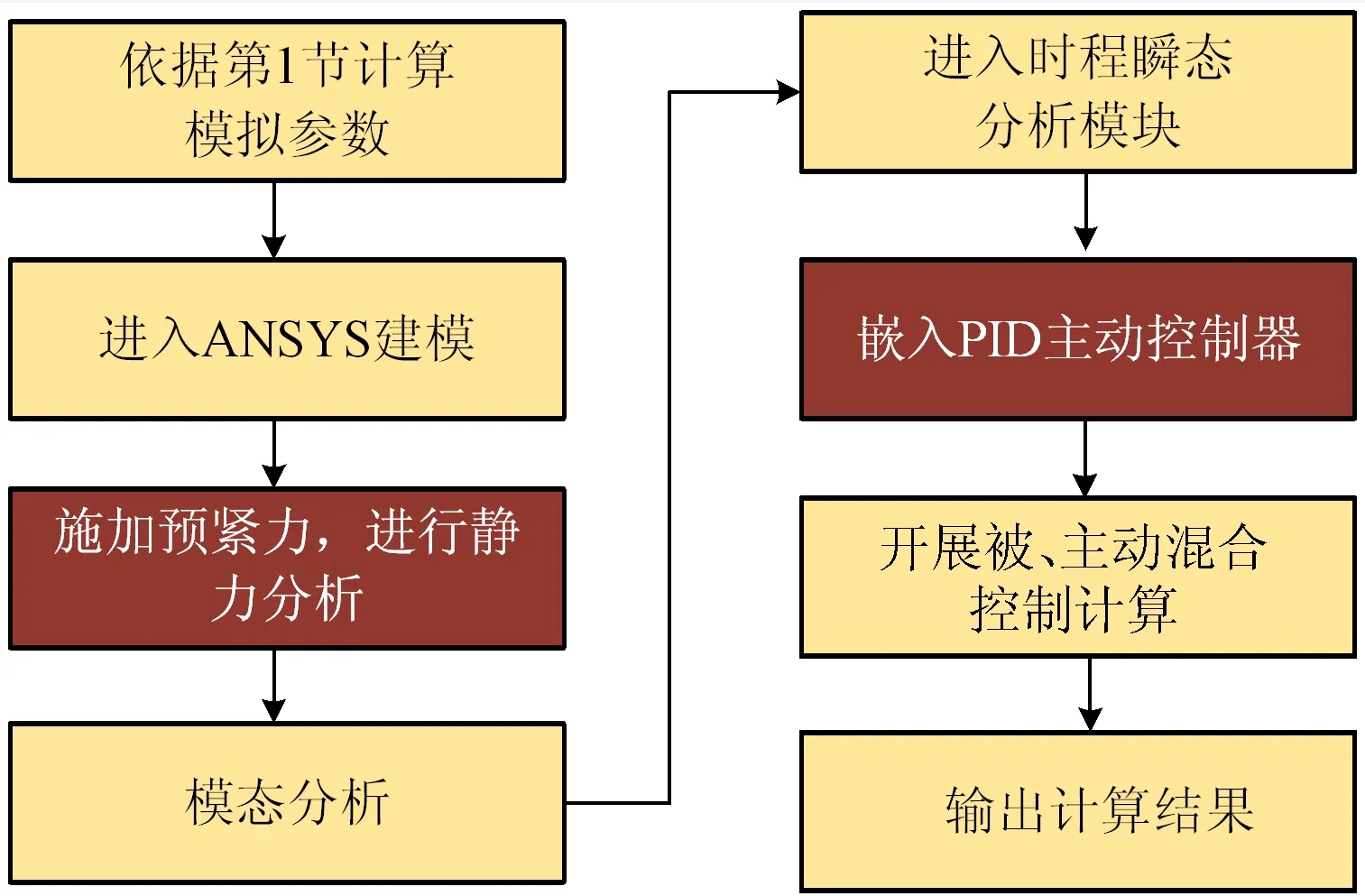
图9 被、主动混合控制有限元分析流程

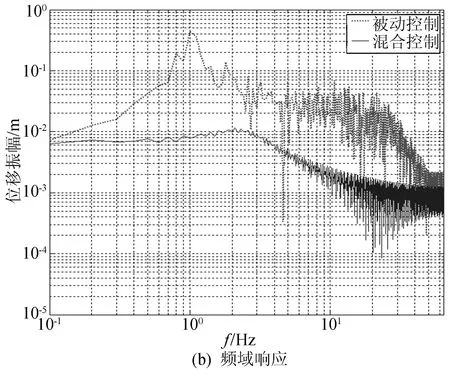
图10 被动与混合控制响应对比
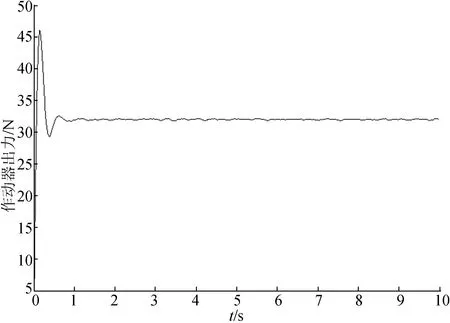
图11 作动器出力

图12 作动器出力部分放大曲线
5 结 论
本研究基于正负刚度并联的准零刚度原理,开展低频振动控制设计,并根据弹簧预紧原理,在有限元预应力激活状态下开展模态计算;结果表明,可以使体系达到较低的固有频率。为了进一步改善被动控制效果,提出了基于被、主动混合控制方法,提出并设计了可嵌入ANSYS/APDL的PID主动控制器;结果表明,混合控制可以大幅改善被动控制效果,效果显著,验证了本文所提策略的有效性。本研究中的铰接机构考虑为连杆,在实际工程中可以将连杆替换为薄板,将该体系变为三维准零刚度体系,方便使用,如图13所示。本研究提出基于有限元分析环境的主动控制,是数值模拟与自动控制理论分析的结合,为实际工程计算提供了一种新思路,本文中使用PID经典控制,亦可在后续研究中考虑LQR、LQG等现代控制算法。
本研究为准零刚度体系在精密工程微振动控制领域的应用提供了一种新思路。
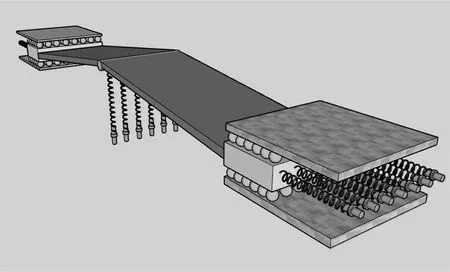
图13 薄板铰接型正负刚度并联体系