任意初态下的工业机器人迭代学习控制
2021-02-04惠小健
惠小健
西京学院 理学院,西安710123
执行重复运动的工业机器人的精确轨迹跟踪控制,对保证生产安全,提升产品品质具有重要的意义。迭代学习控制算法是工业机器人最常用的控制算法[1-4],但迭代学习控制算法实现轨迹跟踪的前提是每次的迭代初值相同,该要求在实际工程中很难实现,为此,研究任意初态下的机器人轨迹精确跟踪控制具有重要的工程应用意义。
迭代学习控制[5](Iterative Learning Control,ILC)通过利用先前的轨迹跟踪误差和控制输入信息来产生当前次的控制输入,以实现对系统跟踪估计的调整,在足够次的迭代学习下,系统输出达到对期望轨迹的精确跟踪。迭代学习控制算法的核心是迭代学习的收敛性,而迭代初值则制约着迭代学习算法的收敛性[6-7]。综合现有研究成果,迭代初值问题主要分三种情况[6-8],第一种情况是迭代初值固定,第二种情况是迭代初值在期望值某一领域内变动,第三种情况则是任意初态下的迭代学习控制。只有第三种情况因最符合实际工程应用,使得其成为当前学者攻关的重点。对任意初态下的迭代学习控制算法,当前主要有两种方法,一种是基于压缩映射方法[9],在固定PID迭代学习控制器的前提下,探讨的是抑制任意初态的策略和保证PID 迭代学习控制收敛的条件。第二种算法则是基于李雅普诺夫函数推出的非线性迭代学习控制算法[10-12],该方法是基于李雅普诺夫稳定理论,构造非线性迭代学习控制器,以实现对期望轨迹的局部精确跟踪。随着现代控制理论研究成果的成熟,如何将现代控制理论与迭代学习控制相结合,以改善迭代学习控制算法的鲁棒性和任意初值问题,成为一个新的研究点,为此,本文根据滑模控制算法中的任意初态能在有限时间内收敛到滑模面的特性[13],提出一种基于滑模面的机器人迭代学习控制算法,达到对任意初态下的机器人轨迹精确跟踪控制,并从理论上和数值仿真上验证本方法的有效性和可行性。
本文的主要创新点主要表现在:(1)建立关于跟踪误差的滑模面,使处于任意位置下的系统初态在有限时间内收敛到滑模面内,而滑模面在有限次迭代后将收敛到0,实现机器人轨迹与期望轨迹的精确跟踪。(2)基于李雅普诺夫稳定理论,为机器人轨迹跟踪系统设计了非线性迭代学习控制算法,并理论证明了迭代学习的收敛性。
1 控制问题描述
考虑如下n自由度刚性机器人系统[9]:

机器人系统中的矩阵满足如下条件:
(1)矩阵D(q)为对称正定矩阵。
控制问题描述:对在区间[0,T]上做重复运动的工业机器人系统,记期望位置函数为qd(t),且速度和加速度存在。位置跟踪误差为ek(t)=qd(t)-qk(t),其中k为迭代次数。设在任意初态条件下,即ek(0)≠0,设计迭代控制器uk,使跟踪误差ek(t)在区间[Δ,T]上实现完全跟踪。
2 基于滑模面的迭代学习控制器设计
对于任意初值的重复运动过程,其核心问题是在最初的[0,Δ]时间内,轨迹跟踪误差ek(t)≠0,但只要能保证轨迹跟踪误差在区间[Δ,T]上满足ek(t)≡0,则依然能满足机械臂执行重复运动的控制目标,因此,任意初态下的迭代学习控制,其核心是要求在有限时间Δ内,使得系统的轨迹跟踪误差收敛到0,基于此,本文结合有限时间控制方法,给出一种抑制任意初态的滑模迭代学习控制算法。滑模控制迭代学习控制的结构图见图1所示。
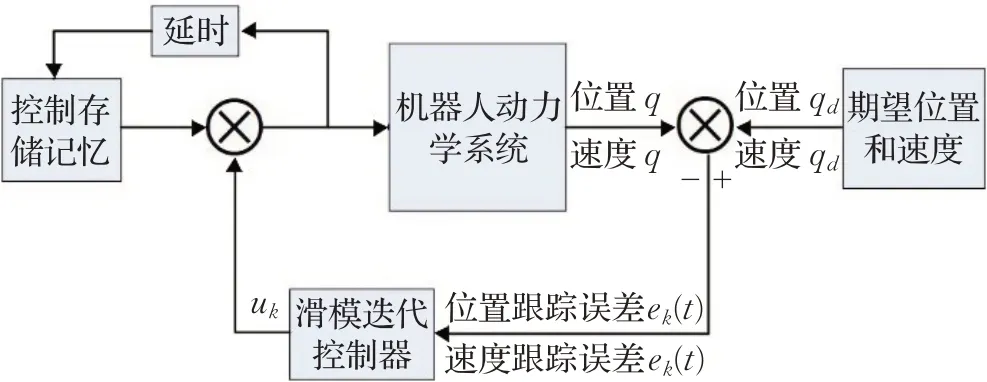
图1 滑模迭代学习控制结构图
定理1[14]如果存在正定Lyapunov函数V(x)及参数λ1>0,λ2>0 和0<α <1 满足:

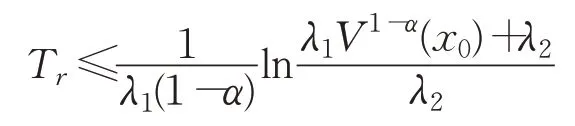
则系统状态x(t)能够在有限时间内到达原点,且到达时间满足:
设有滑模面:

当σ(t)=0 时,,取李雅普诺夫函数V0=0.5eTe,则有:

根据定理1,可得到跟踪误差将会在有限时间内收敛到0,且收敛时间:

可见,选择适当的参数k1,k2,β,使得:

则在t≥Δ之后,系统的跟踪误差e(t)≡0,同理可以得到
对于t≥Δ,要使跟踪误差在t∈[Δ,T]满足e(t)≡0,其前提是滑模面σ(t)=0,因此,在对机器人系统设计迭代学习控制器时,若能使系统经过有限次迭代后,使得在整个迭代区间[0,T]内,滑模面σ(t)≡0,即可保证机械臂的轨迹跟踪误差在t∈[Δ,T]满足e(t)≡0。
根据式(1),记第k次迭代的机器人系统为:

引入新的变量:

则本文建立迭代学习控制器为:

下面证明迭代学习控制的收敛性和稳定性。
第一步,构造正定李雅普诺夫函数Vk(t),并证明李雅普诺夫函数Vk(t)关于时间t单调递减。根据滑模面的定义,有:

对滑模面求导,得:

构造动态方程:

构造正定李雅普诺夫函数:
则有:
将控制器式(7)代入式(11),则有:
式(12)说明Vk(t)关于时间t单调递减。
当k=1时,因为函数D(q1),σ1(t) 分别关于时间t连续,且t∈[0,T] ,因此V1(t) 在t∈[0,T] 内有界。再由可知,有界。

说明李雅普诺夫函数Vk(T)随迭代次数而递减。

通过以上证明可以得到,本文所设计的控制器式(7)能有效抑制随机初始状态,且能保证随着迭代次数的增加,实现对给定期望的精确跟踪。
3 仿真验证
本文选择文献[16]中的机器人模型参数:
3.1 有效性验证
采用本文所设计的迭代学习控制算法进行编程,仿真次数设为10次,经过10次迭代学习后,机器人系统输出与期望输出轨迹见图2和图3所示。
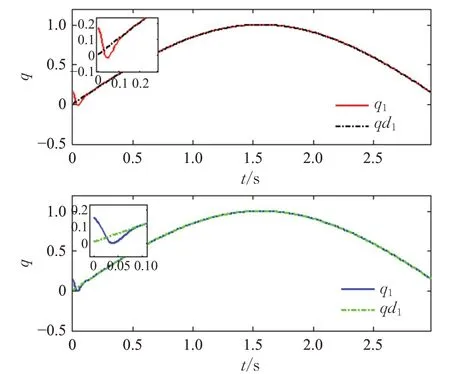
图2 机器人位置跟踪图(第10次)
通过以上仿真结果可以看出,在每次迭代过程中,虽然机械臂的初始状态为任意值,但在本文所设计的迭代学习控制算法下,机械臂的位置仅在最初很短时间内与期望位置有偏差,随后,机械臂的位置与期望位置几乎达到精确跟踪;机械臂的加速度对期望加速度的跟踪收敛时间虽然长一点,但是加速度也在0.2 s内达到精确跟踪,说明本文所设计控制算法能有效抑制任意初态,且能保证机器人实现对期望轨迹的精确跟踪。

图3 机器人速度跟踪图(第10次)
3.2 抗干扰能力分析
为验证本文所设计迭代学习控制算法的抗干扰能力,在机器人轨迹跟踪系统中增加外部干扰项采用同样的控制参数和控制器进行数值仿真,迭代10次后的仿真结果见图4、图5所示。
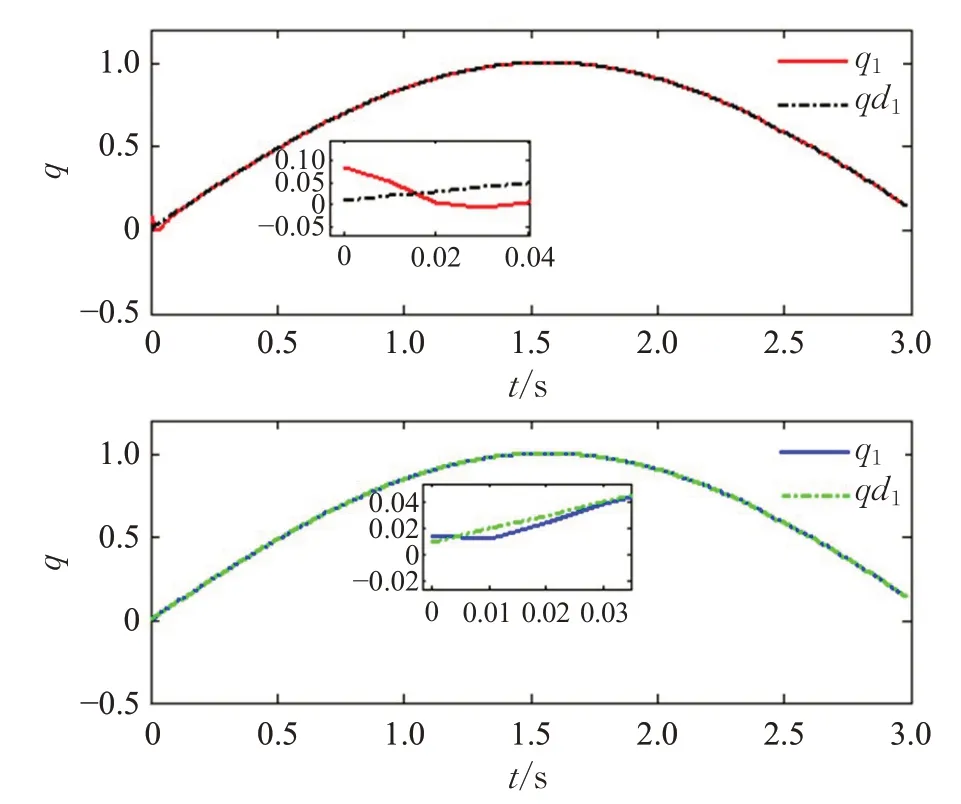
图4 机器人位置跟踪图(第10次)
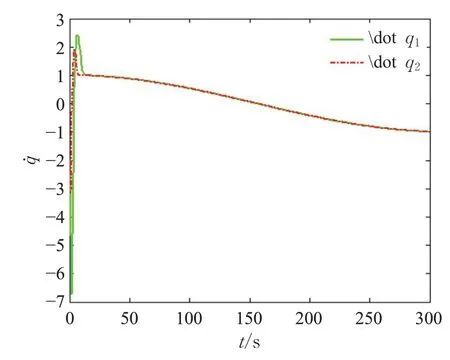
图5 机器人速度跟踪图(第10次)
通过图4和图5可以看出,在相同仿真条件下,即便是机器人轨迹跟踪系统中增加了外部干扰,经过10 次迭代学习后,机器人依然能保证对期望轨迹的精确跟踪,且跟踪效果与没有干扰项的跟踪效果相同,说明本文所设计的控制器也具有较强的抗干扰能力。
3.3 对比分析仿真
为验证本文所设计算法的优越性,针对本文所给的机器人系统模型,分别采用本文设计的滑模迭代学习控制器与文献[8]和文献[9]所给的控制器进行对比仿真分析,迭代10 次后的三种算法的仿真结果见图6、图7所示。
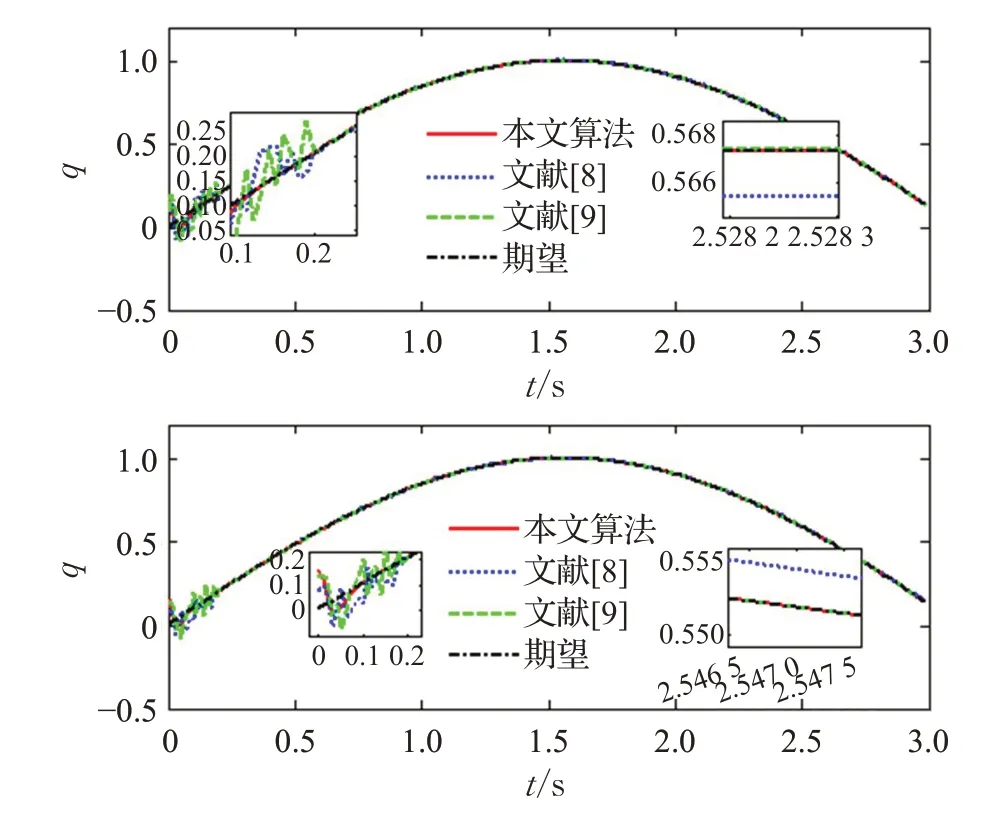
图6 机器人位置跟踪图(第10次)
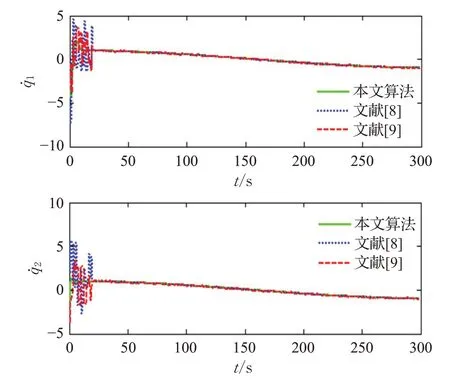
图7 机器人速度跟踪图(第10次)
根据图6和图7可以看出,虽然文献[8]和文献[9]中的控制器最终也能实现对期望位置和速度的精确跟踪,但在最初[0,Δ]时间内,本文方法不仅跟踪时间更短,且波动幅度更小。就位置跟踪精度来说,通过图6可以看出,本文方法的精度要比文献[8]和文献[9]的跟踪精度更高。
4 结束语
本文以任意初态下的机器人轨迹跟踪控制系统为研究对象,基于有限时间控制理论,设计了基于位置和加速度跟踪误差的滑模面,使得在滑模面内,无论初始位置和初始加速度处于何处,机器人的位置和加速度均能在有限时间内收敛到期望的位置和加速度,有效解决了迭代学习中的任意初值问题。接着从理论分析入手,理论证明了在本文所设计的非线性迭代学习控制算法下,机器人系统经有限次迭代学习后,滑模面将一致收敛到零,以保证整个迭代学习过程的收敛性和机器人轨迹跟踪的精确性。