一种轮式装甲车模拟器转向机构力感模型*
2021-02-03魏国强朱元武
魏国强,朱元武,朱 锐,罗 浩,武 帆
(北方自动控制技术研究所,太原 030006)
0 引言
目前,在装甲模拟训练过程中,大多数训练内容都围绕着视觉和听觉感知来进行,然而,随着相关研究的深入,触觉感知在人体对外界感知方面的作用变得越来越不可忽视[1]。在装甲车驾驶过程中,转向机构的手感为驾驶员传递了路面、车况、车辆行驶等信息,是驾驶员正确操纵车辆的重要依据。在模拟器的设计中,由于行驶环境、车辆行驶状况都是虚拟生成的,转向机构中没有和路面、轮胎等的直接连接,因此,需要模拟生成随车况、路况等状态变化的实时转向机构力感,从而带来更为逼真的驾驶体验[2-3]。研究装甲模拟器中的驾驶转向力感反馈,对于提高模拟驾驶操纵力感的逼真性,从而提高驾驶训练的效果具有重要的意义,对于装甲模拟器在触觉领域的仿真研究也具有开创性的作用。
目前的装甲模拟器转向机构,其设计往往以传递运动为目的而多忽略力的反馈,其设计往往以齿轮为传动机构,没有力感的发生装置。少数带力反馈的转向机构,也多以弹簧为施力机构,提供给驾驶员以线性变化的力感反馈。但是,车辆在行驶过程中的力感变化是复杂的,其值的大小受众多因素的影响,驾驶员对路况和车况的感知,往往也是通过微小的力矩变化而体现出来的,失真的力感反馈甚至会对训练造成负面的影响。在控制策略方面,TongJin Park 等人采用键合图的方法对转向系统进行了建模,通过对车速和方向盘转角的拟合函数对线控转向系统路感控制策略进行研究[4]。Mehdizadeh E.等人在转向系统力矩反馈模型中,综合分析了车轮回正力矩、转向系统惯量和阻尼的影响,并基于方向盘转角和车辆模型给出方向盘力矩的算法,结果表明,该算法减少了转向过程中的偏移误差,提高了方向盘的可操纵性[5]。Fankem S 等人也对车辆转向系统进行过建模并通过不同的模型对转向力进行了分析[6]。浙江大学张薇薇等分析了在纯滚动的情况下,汽车转向系统阻力矩组成和影响因素,并提出了方向盘转向力矩的计算模型[7]。但是,他们并没有提出针对车辆行驶全过程的力矩计算模型。
本文提出一种基于车速的转向力感计算模型,该模型针对轮式装甲车辆,以转向受力分析为基础,提取了影响转向力感的车内、车外因素并进行整合。建模时,将车速划分为低速段、中速段和高速段3 个分段,对各段的受力作用进行处理。在3 个车速分段连接处采用力矩曲面插值的办法,实现分段的顺滑连续过渡。仿真结果表明,该模型在车辆行驶全路段可以呈现出良好的力矩曲线。将模型运用在某型装甲车模拟器设备上,取得了良好的实际效果。
1 力感影响因素的分析
在装甲车的驾驶行为过程中,方向盘做着自由度为1 的运动,即绕着转向柱的转动。在转动过程中,转动力感的影响因素众多,组成成分复杂。
1.1 受力分析
驾驶员在转动方向盘时候的力感值,可以分解为方向盘回正力矩、转向轮和地面之间的摩擦阻力矩、转向机构内部摩擦力矩和助力系统助力矩4 部分。其中,方向盘回正力矩是指汽车行驶过程中方向盘受到的使其回到中心位置的力矩,主要由转向轮的回正力矩通过传动机构传递到方向盘处。转向轮和地面之间的摩擦力矩、方向盘转向机构内部摩擦力矩为阻力矩,可认为是方向盘受到的阻止其转动的反作用力矩。助力系统助力矩是指车辆助力系统对方向盘力感的作用,本文研究的装甲车实装采用液压助力系统。
1.2 影响因素分析
1.2.1 车辆内部机构的影响
车辆内部机构的影响是指车辆的转向机构中,影响转向力感的零件及相关参数。针对装甲车的实际状况,可得车辆内部机构对于方向盘转向力矩的影响因素如表1 所示。
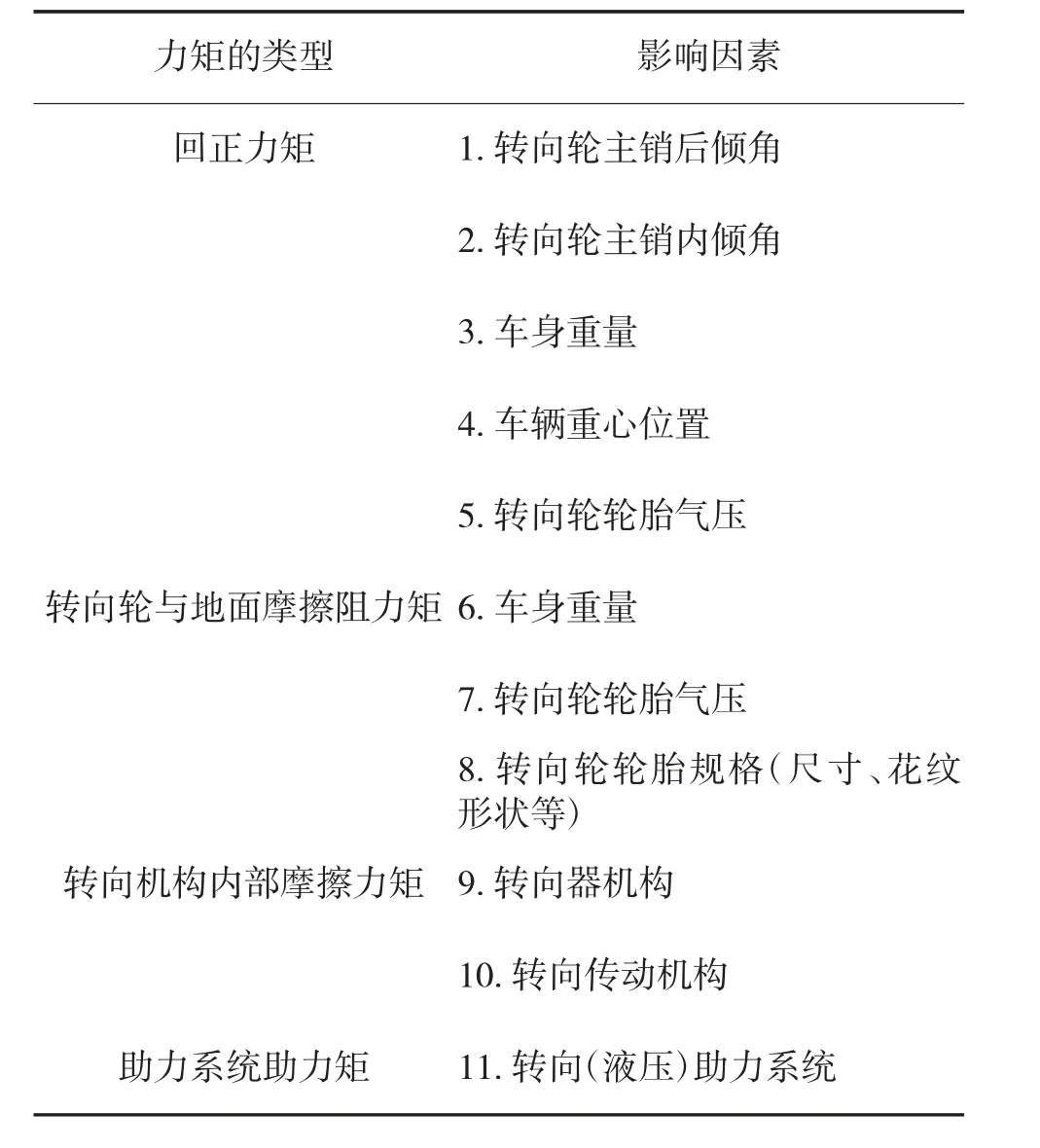
表1 车辆内部机构的力感影响因素
1.2.2 车辆行驶状态和外部环境的影响
车辆行驶状态是指车辆在行驶过程中的有关参数。车辆行驶环境对转向力感的影响,即行驶环境对转向轮的影响的传递。针对装甲车的实际状况,可得车辆行驶状态和外部环境对于方向盘转向力矩的影响因素如下页表2 所示。
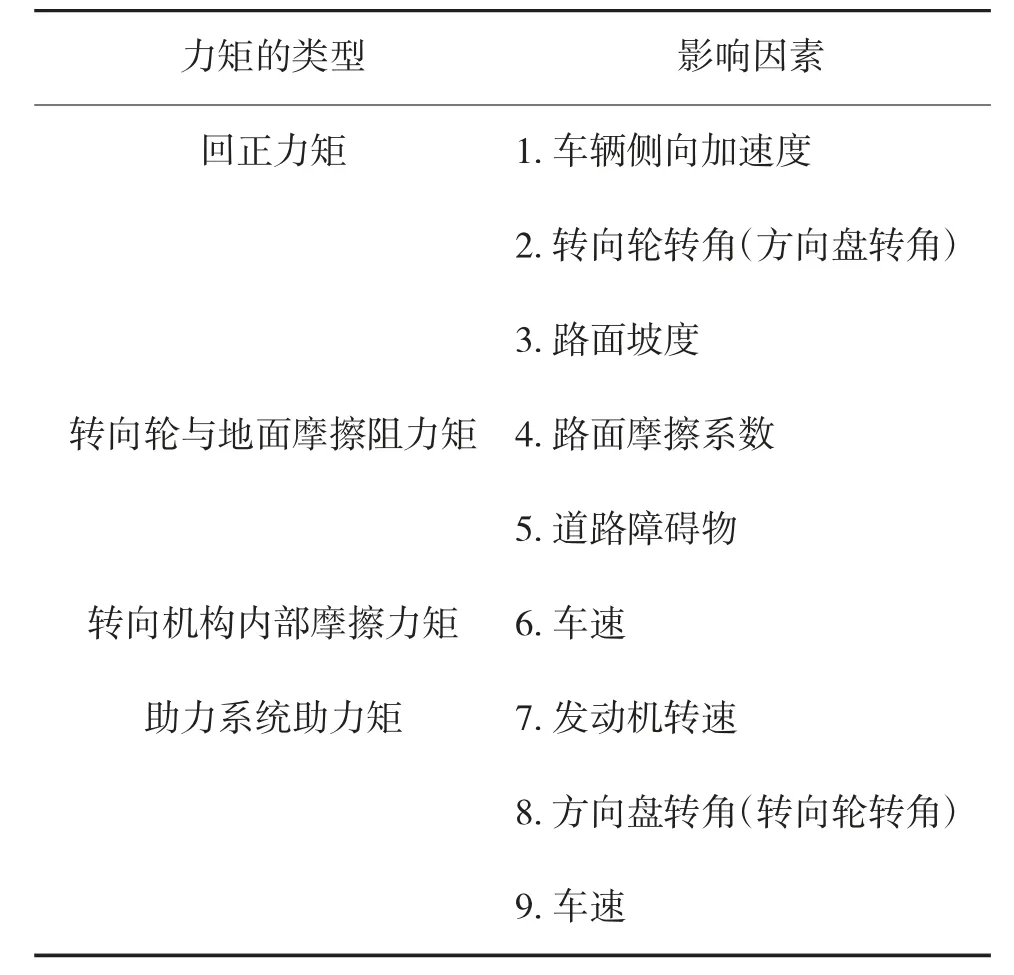
表2 车辆行驶状态和环境的力感影响因素
1.3 转向力计算公式
以转向力的分解为基础,得到转向机构力矩值计算公式如下:

其中,T 为4 部分作用力的合力效果。在不同情况下,这4 部分力所占比重不同。
1.3.1 转向轮与地面的回正力矩
转向轮与地面的回正力矩主要包括两部分力:重力回正力矩和自回正力矩。如式(2)所示:

其中,MA为主销内倾造成的重力回正力矩,MVZ为轮胎变形造成的自回正力矩。
当转向轮转角较大时,MA为主要力矩:

其中,FZ为轮胎垂直载荷,rs为主销偏移距,σ 为主销内倾角,δL为转向轮转角,r 为车轮中心与地面的垂直距离。主销偏移距、主销内倾角为轮胎安装尺寸,在行驶过程中会有微小变动。
当转向轮转角较小时,MVZ为主要力矩:

其中,Fy为轮胎侧向力,θ1为气胎拖距,θ2为后倾拖距。
1.3.2 转向轮与地面之间的摩擦力矩
当车辆原地转向或者车速很低的情况下转向时,该摩擦力以滑动摩擦为主,当车辆在行驶过程中转向时,该摩擦力以滚动摩擦为主。由于影响因素众多,要精确计算是非常困难的,所以业界常常用经验公式来进行估算。
滑动摩擦力矩:

滚动摩擦力矩,通常为滑动摩擦力矩的1/4~1/3。
1.3.3 转向机构的内部摩擦力矩
转向机构内部摩擦力矩包括转向传动机构摩擦力矩和转向器机构内部的摩擦力矩,其计算公式如式(6)所示:

其中,Tstiffness为转向系统刚度阻力矩,Tdamp为转向系统阻尼阻力矩,Tfriction为转向系统摩擦阻力矩,Tinertia为转向系统惯量矩。δ 为方向盘转角,k 为转向系统等效刚度,b 为转向系统等效阻尼,F 为转向系统等效库伦摩擦力矩,J 为阻尼系统等效惯量。
1.3.4 助力系统助力作用
助力系统助力作用为(液压)转向助力机构的助力系数,它可以看作是与方向盘转角δfxp、车速vc、发动机转速ωfdj有关的函数。如式(7)所示。

2 基于车速的力感计算模型
2.1 建模原则
在实际的装甲车驾驶过程中,车速是最直观最重要的指标之一,不同驾驶场景下,车速有着明显的差别。在作战环境下,车速也是装甲车防护性能、火力性能、机动性能等性能的重要决定性因素。本文对30 名装甲车驾驶员进行了实际的驾驶力感调研,得到了基于车速建模的以下几点原则:
1)装甲车在不同车速下,驾驶员力感大小有明显的差别;
2)低车速情况,多发生于车辆移库、倒车以及起步阶段,在没有助力的情况下方向盘力感沉重;
3)高车速情况下,方向盘力感轻便,驾驶员能快速修正方向盘转角;
4)低车速及中等车速情况下,液压助力作用能够大大减轻方向盘的力感;
5)车辆在行驶过程中,方向盘具有自动回到中位的趋势和运动。
2.2 基于车速的模型
针对不同车速,将式(1)所示的4 种力进行组合,评判各部分所占权重,进行力感建模。该模型综合了各种因素的影响,实现了车速全过程、全路段建模,并且在不同车型之间具有一定的通用性。选取-VL1 到VL2 为低速段模型,VM1 到VM2 为中速段模型,VH1 到VH2 为高速段模型。结合装甲车辆档位设定和助力系统的参数调教,车速分段值选择如表3 所示。
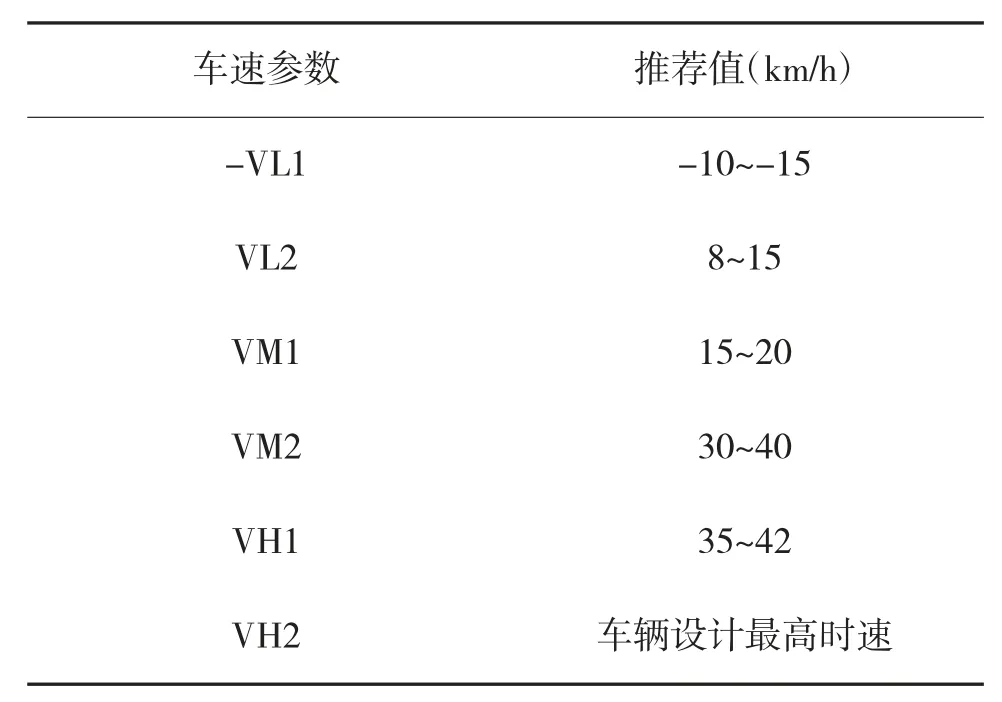
表3 车速分段值选择
1)低速段模型(-VL1<v<VL2)

其中,fk为路面摩擦影响系数,fρ为轮胎胎压影响系数。由于车速的原因,回正力矩的大小可以忽略不计。转向轮与地面的摩擦力矩以滑动摩擦力矩为主。f助力为发动机转速的函数。
结合国军标GJB59.13-88 规定,fk可按表4 进行划分。
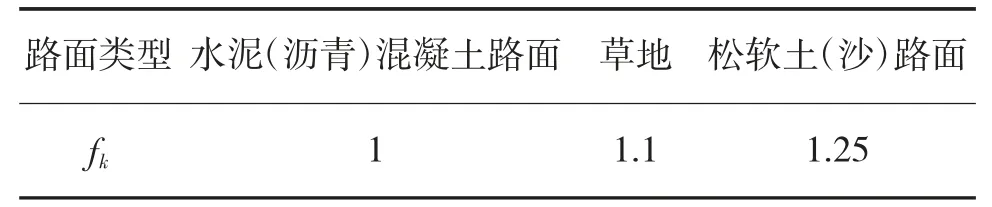
表4 路面摩擦影响系数fk
结合国军标GJB 3086-97 规定,fρ可按表5 进行划分。
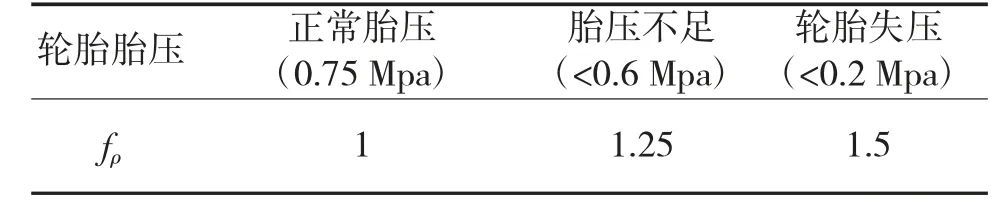
表5 轮胎胎压影响系数fρ
2)中速段模型(VM1<v<VM2)

其中,回正力矩为主要作用力。fk、fρ可参照低速段适当减小。转向轮与地面的摩擦力矩以滚动摩擦力矩为主。f助力为车速和发动机转速的函数。
3)高速段模型(VH1<v<VH2)

其中,由于车速较大,转向轮与地面摩擦力可忽略不计。车辆在高速行驶阶段,方向盘转角的增大,会减小车辆的转弯半径,从而增大车辆的侧向力,当侧向力超过车辆附着极限的时候就会发生侧滑甚至侧翻的危险,因此,高速段的驾驶行为主要发生在中心转向区内。本着这个原则,在此分段,重点考虑中心转向区的力感处理。结合实装的具体情况,f助力的影响作用较小。
2.3 不同车速段的过渡
本文中,不同车速段之间采用在力矩地图中曲面插值的办法来实现过渡。
力矩地图是一种图形化的力矩表示方式,它以力感的影响因素为自变量,以力感值为对应函数,是一种多输入单输出的数学表示方式[8]。曲面插值法是空间可视化表达和图像处理中的重要方法,利用曲面插值的方法对力矩图进行插值处理,并控制相邻曲面之间的曲面误差,可以实现不同车速段的力感值顺滑过渡。
2.4 转动零位的过渡
受到转向系中库伦干摩擦和车辆相位滞后的影响,方向盘在0 g 处的转矩不应该为0 N·m,由经验公式,可将0 g 转矩设为一个小扭矩值△N·m。同时,为了使方向盘可以迅速稳定的回到零点,消除在零点附近的震荡,本文设计在低、中、高速段分别将方向盘零点两侧±30°、±20°、±10°范围内的区域设置成阻尼区。当方向盘进入阻尼区时,采用位置阻尼算法,根据当前方向盘的位置和转动方向自动生产阻尼力,并且阻尼力的产生随位置积分而渐变。如图1 所示。
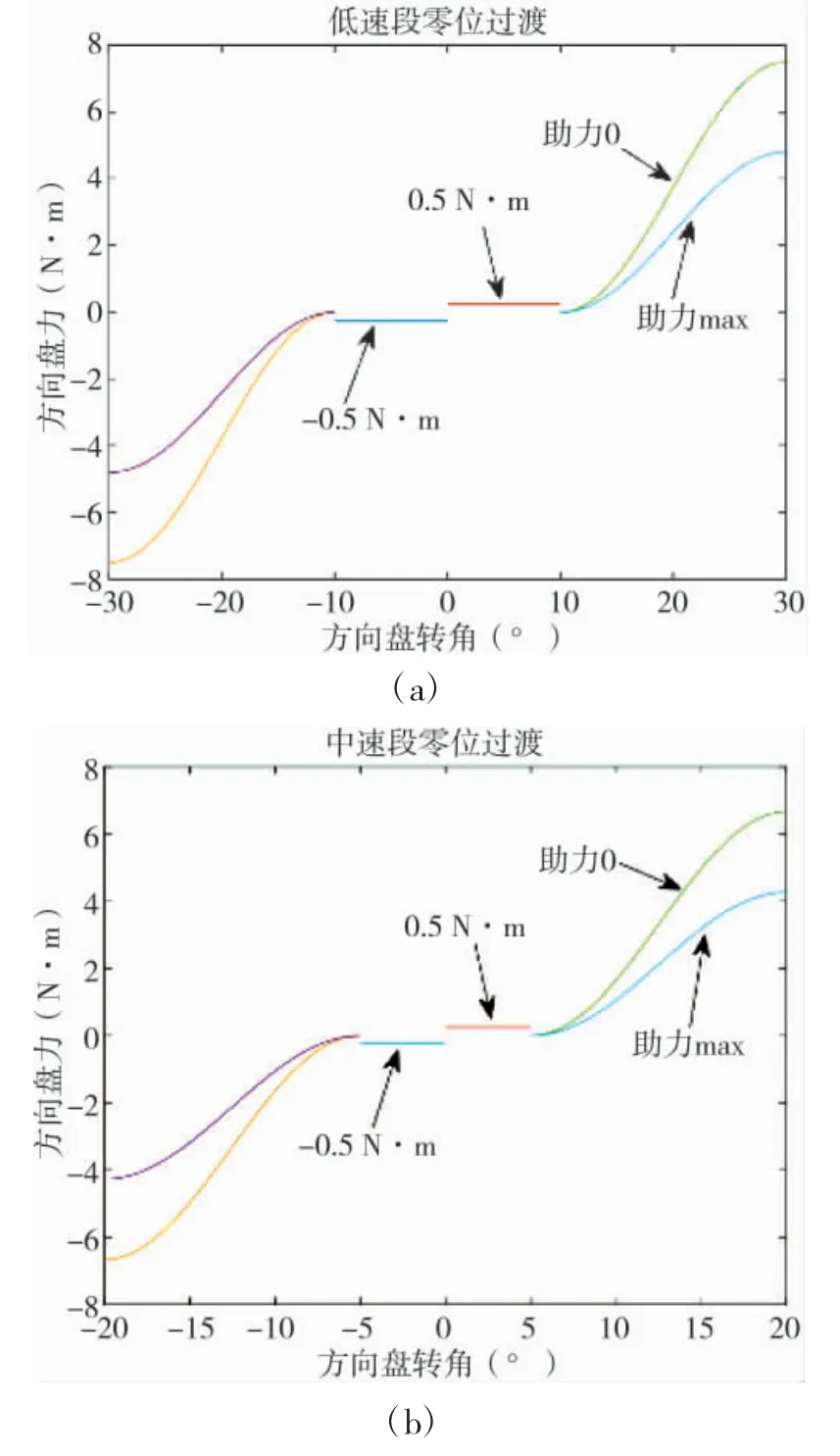
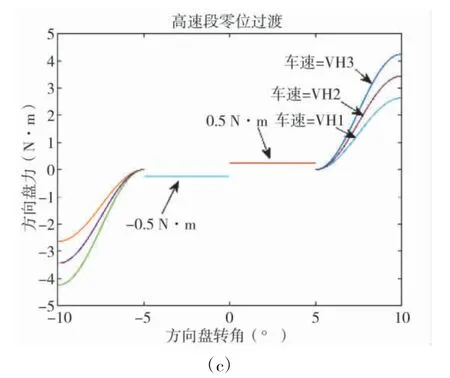
图1 低、中、高速零位力感值过渡示意图
3 力矩曲线及仿真分析
选取-10 km/h<=v<=8 km/h 为低速段区间,以车速、方向盘转角、发动机转速为自变量,设定路面摩擦影响系数和轮胎胎压影响系数为常量,可得低速段力感仿真曲线如图2 所示。
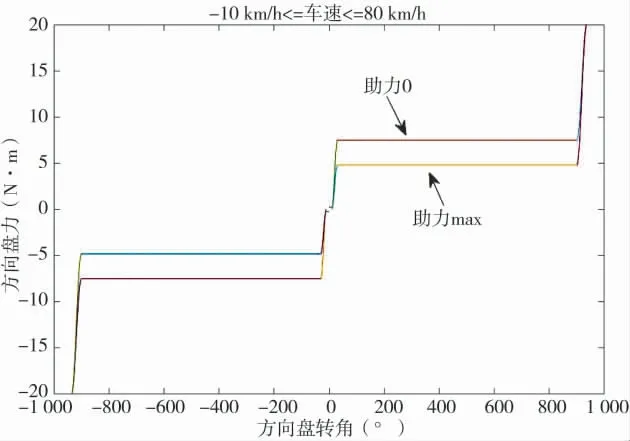
图2 -10 km/h<=车速<=8 km/h 时的力感仿真结果(|δ|<936°)
选取15 km/h<=v<=30 km/h 为中速段区间,可得中速段力感仿真曲线如图3 所示。
选取35 km/h<=v<=120 km/h 为高速段区间,可得高速段力感仿真曲线如图4 所示。
选取9 km/h 到15 km/h 为低中速过渡段,以车速、方向盘转角、发动机转速为自变量做力矩曲面图,插值误差小于0.5 N·m 建模,结果如图5 所示。
选取31 km/h~35 km/h 为中高速过渡段,插值误差小于0.5 N·m,其建模结果如下页图6 所示。
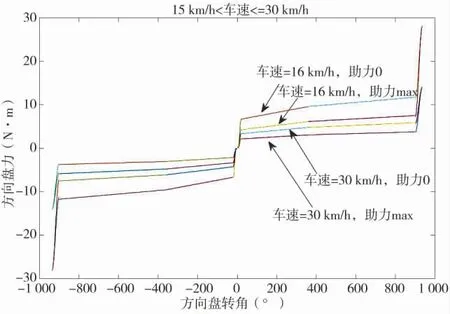
图3 15 km/h<车速<=30 km/h 时的力感仿真结果(|δ|<936°)
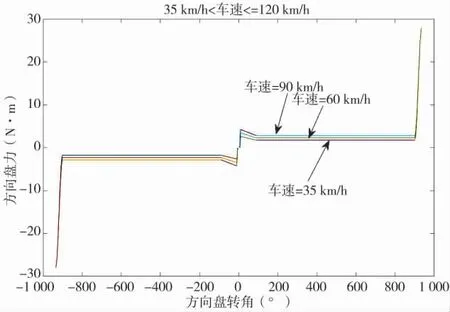
图4 35 km/h<车速<=120 km/h 时的力感仿真结果(|δ|<936°)
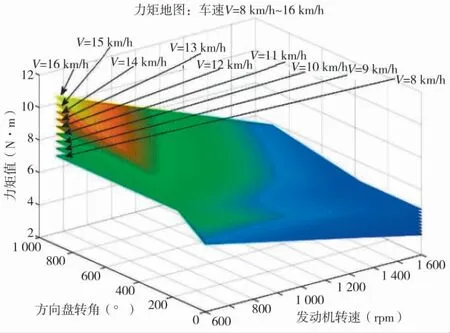
图5 9 km/h~15 km/h 过渡模型
4 力感实现方案
本文采用基于力矩电机系统的实现方案。在方案中,转向机构以电机为施力机构,以Arm 板为控制核心,以编码器、中位传感器为传感装置,以皮带轮为减速机构,整个机构通过与视景计算机的通信完成信号的双向传递。结构连接和信号流动如图7所示。
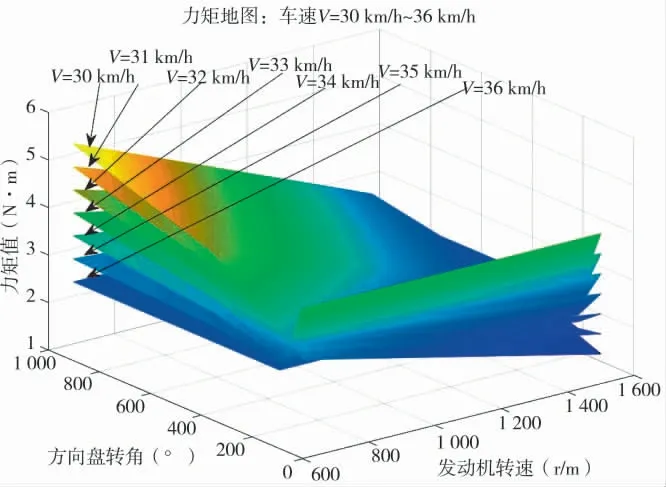
图6 31 km/h~35 km/h 过渡模型
其中,力感模型计算所得的数值,经过控制板的计算,转换为力矩电机的相应电流值,通过驱动器闭环控制,实现对电机输出转向力的控制。
转向模拟机构的实物如图8 所示。
5 模型校正及实际体验效果
吉林大学针对实车所做的低速段方向盘力矩测量实验,结果如下页图9(a)所示[9]。图9(b)为本文模拟机构在车速为20 km/h,发动机转速为1 000 r/m 时的测量结果。
对比测试结果可知,本模型测试结果与实车有着相同的变化趋势。不同型号的装甲车辆具有不同的转向系统设计,转向角度也有很大区别,并且随着装备的更新换代,转向助力系统的调教也会逐渐优化。通过对本模型中各参数的调整,可以在很大程度上对不同型号的模拟器实现力感的模拟。
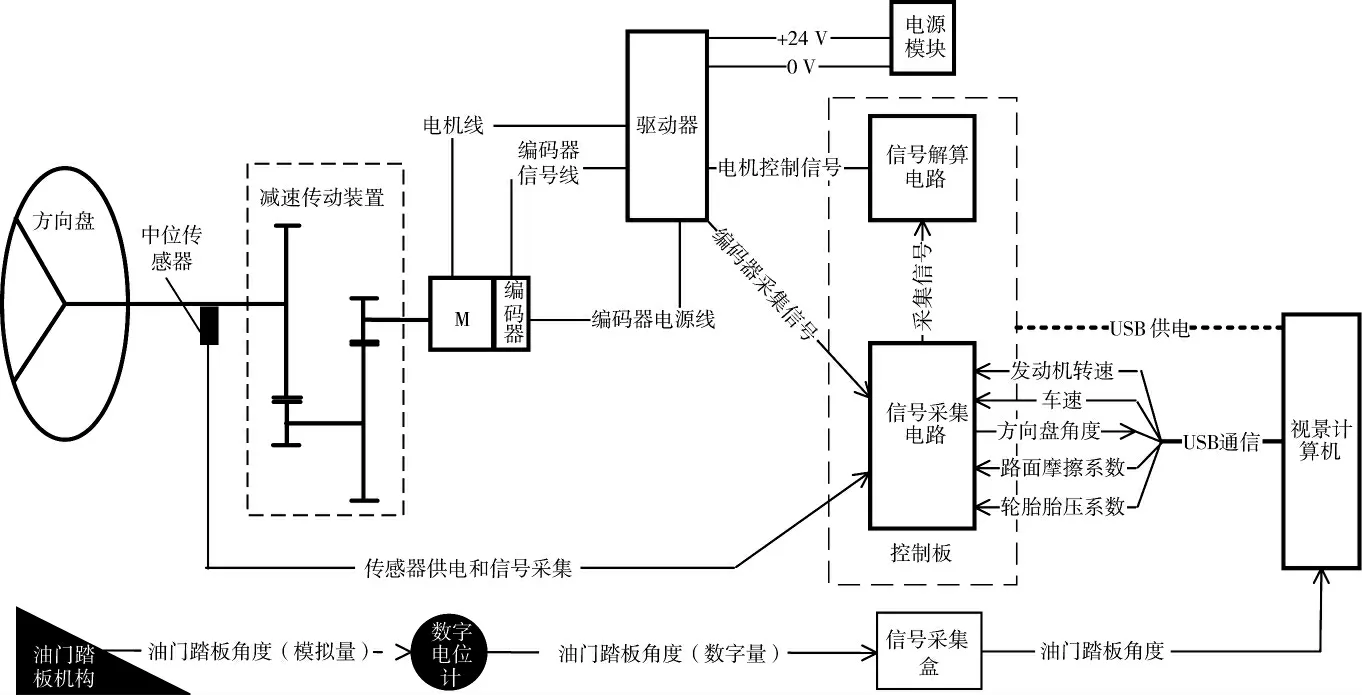
图7 转向机构结构连接及信号流动示意图
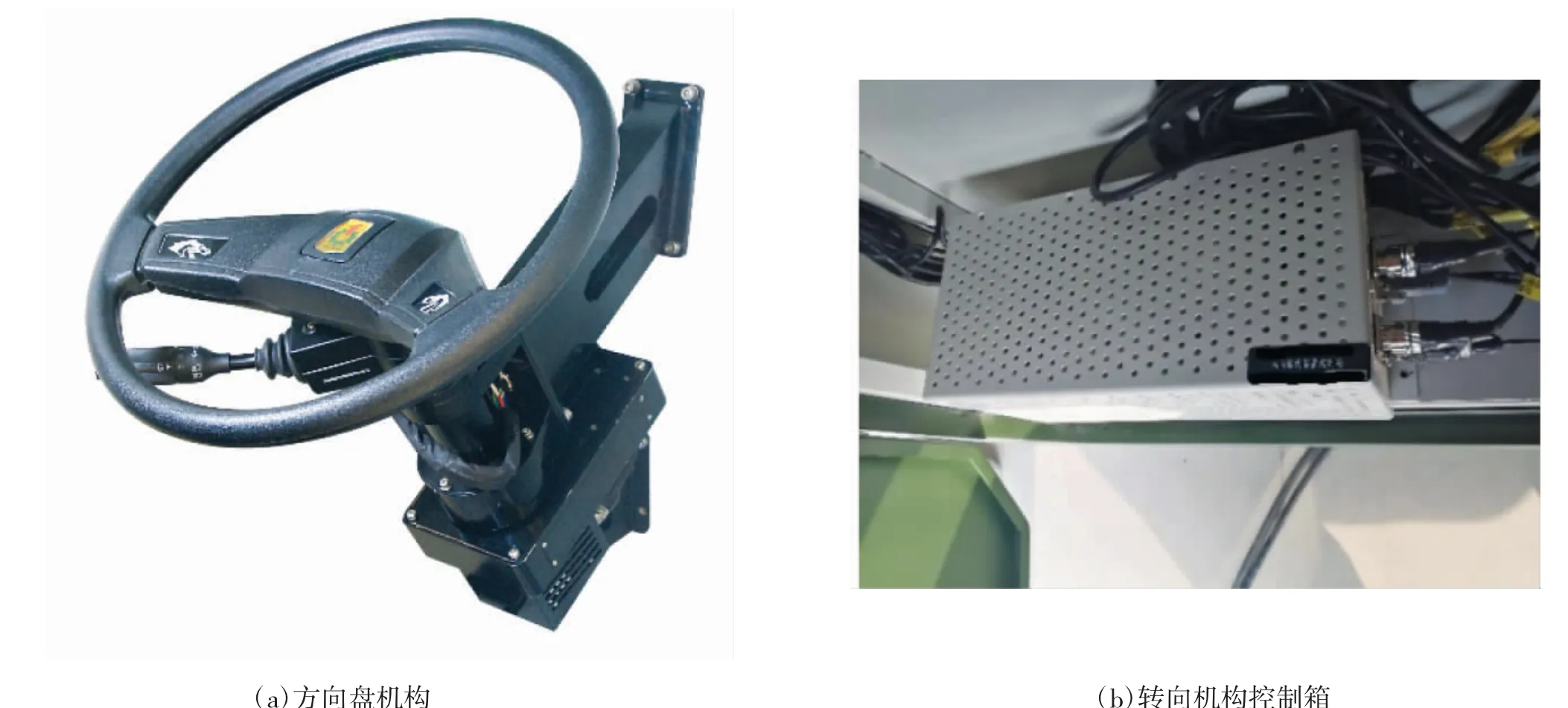
图8 转向模拟机构实际效果图

图9 吉林大学低速力矩测试结果
由《汽车理论》,方向盘在中心转向区的力感理论曲线如图10 所示[10]。对比图1 可知,本文所提出的模型已经对方向盘回正滞后现象进行了模拟,但是受限于机械传动结构的振荡特性,滞后力矩可能与实际有出入,在实际应用中,应该结合模拟器的型号来选择合适的机械传动机构。
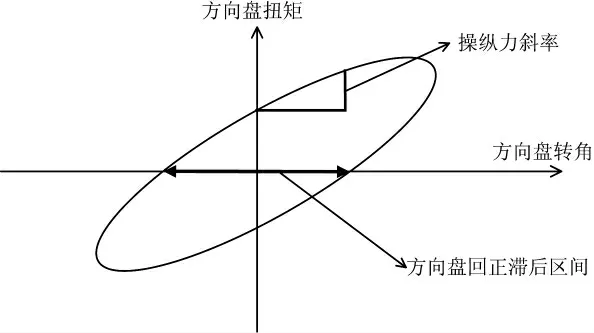
图10 中心转向区力感理论曲线
在某训练基地组织30 名装甲车驾驶员进行了实际的模拟驾驶体验,对方向盘操作力感进行打分评判,取得了良好的使用效果反馈。结果如表6 所示。
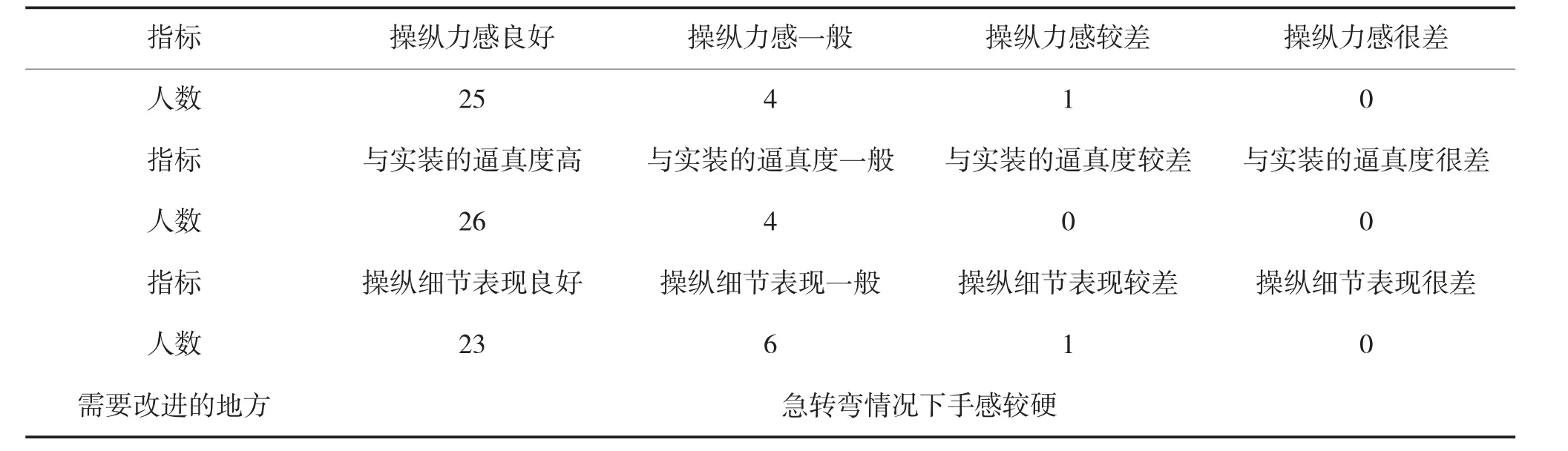
表6 驾驶人员打分统计表
6 结论
本文从理论上对转向力进行了分解分析,将转向力分解为了4 个部分,并对各部分进行了分析。提取出影响力感的因素并对各因素进行了分析。提出了基于车速的力感计算模型,该模型可以实现车辆行驶全过程的仿真计算。利用数值插值的方法对力矩曲面进行顺滑过渡,使力感模型变得顺滑连贯。由测试结果和实际使用反馈可知,模型取得了良好的实际效果。对于提高装甲模拟器的转向机构力感特性、提高模拟器的逼真度具有重要作用。
本文针对传统装甲模拟器转向机构力感不真实的问题,提出了一种切实可行的建模方法,提高了模拟器的逼真度和沉浸感。力感的影响因素众多且繁杂,各种影响作用之间相互制约相互影响,在后续研究中,可以从人体的触觉感知和车辆特殊行驶情况入手,使力感模型变得更加精细和完整。
