战术级空地联合行动空域管控:空中“红绿灯”技术
2021-02-03乔沛昊薛文军冯培伦
乔沛昊,陈 勇,薛文军,冯培伦,邢 欣
(1.北方自动控制技术研究所,太原 030006;2.驻太原地区第二军代室,太原 030006)
0 引言
随着现代科技的不断进步,在未来信息化装备高度发展的情况下,一定会呈现“立体统一、空地协同、一域多分”的攻防作战体系[1]。空中作战平台具有机动性能好、视野广阔、态势感知能力强的优势,地面陆军装甲装备具有防御性能好、部署隐蔽、火力覆盖范围广的优势[2]。采用空中与地面协同作战的方式,结合各自先天的优势,可以充分发挥整体作战效能,提高各兵种武器装备利用率,进而可以快速适应未来战场的复杂多变。
空域管控技术是空地协同作战中的一项关键技术。战场空域管控的关键在于对空域的调配和控制,既要保证我方空域的充分利用,尽可能确保作战任务的实现和作战效能的充分发挥,又要关注敌方空域及敌我交战空域的控制问题[3]。通过对战场空域合理的管控,可以形成统一的联合战斗单元,保障空地协同作战的流畅性,极大地提高防空能力[4]。
目前不论国内还是美国、欧洲等军事强国,在军事领域上主流的空域管理方式是采取在二维、三维界面根据高程进行划分的方法规划空域[5]。作战时,作战部队首先发起空域申请,由空域主管部门下发规划后空域,其下发结果为空域划分和时间区间。空管人员通过对照具体场景在态势图上显示的二维平面图,对空域规划进行二次细分,如:禁飞区、射击区、拦截区、空中危险区等。综合来讲,目前战术级空域使用不灵活,空域利用率较低,没有对不同的层高进行充分利用,缺乏成熟的战术级空域使用规划技术。
本文针对空地协同作战,提出了空中“红绿灯”空域管控技术。首先通过对战场空域进行科学切分,形成网格化战术级空域,这是进行战术级空域管控与调配的最基本单元。将信息与火力融为一体,实现信息与火力的一体化协同,形成体系化作战能力。在战术级空域管控技术中建立空域使用计划自适应调整和控制机制,满足执行作战任务和敌我态势变化的要求,提高战术级空域管理的时效性与空域使用效能。最后引入科学、高效的冲突检测告警技术,增强了战术级“红绿灯”空域管控技术的安全性,以更好地发挥作战效能。
1 网格化空域标识技术
传统空域标识的方法是以空中走廊、航道的形式,在态势图上进行显示。标识空中走廊、航道的形式不够细化,对空域的使用效能不够充分,显示的力度不细。网格化标识空域的方法是对传统方式的一个强有力的补充,很大程度上弥补了原有方法的不足。
1.1 网格化空域切分方法
首先建立战术级空域管理模型,对空域主管部门规划的战术级空域进行切分,可以等分切分,也可以根据具体地理环境,如:高山、丛林等自然屏障对空域进行不等分切分。切分时严格遵照战术级空域切分规定、具体作战任务,如50 m 高程一切,将战术级空域网格化并进行有序的空间编码,如图1所示。

图1 网格化战术级空域
切分后将网格化空域放大,可以看到网格化战术级空域由一个个小立方体的空间构成,每一个小立方体为一个基本单位,如图2 所示。每一个小立方体空间对应一个具体编码,成为研究具体“红绿灯”管控、防碰撞系统的基本单位。

图2 切分后的网格化编码战术级空域
立方体块的各个顶点不得超出空域边界,空域内坐标(Xij,Yij)应满足下式要求,其中,∏(Boundary)为空域边界。

1.2 空域内航道分流合并技术
战术级空域切分后,该空域范围内会有相关业务的航路,如:运输、侦察航路等。每条航路构成一条空中走廊,每条空中走廊包含若干细分的立体网格。当对应具体任务时,在某一条空中走廊中的飞机可以根据实时变化航道的走向,组成若干通道;根据实时战场变化,若干条航道也可以合并组成一条航道。
如图3 所示,中间浅色航道因特殊情况临时设为禁飞航道,通过“红绿灯”空域管控技术可以开辟出若干条安全的临时航道。所有空中走廊的变化均在整个细化切分的战术级空域范围内,具体调配时只需对应相应空域编码即可,因此,航道的临时调整、管控都十分便捷。

图3 网格化空域内航道的分流、合并
1.3 网格化空域切分成效
传统空域管理方法主要围绕计划下的空域划分和时间规划,一条条航道就好比生活中的普通马路,使用不灵活,效率也比较低。网格化细分后的空域,每一块相互区分又紧密联系,战术级空域内的航道可以根据任务扩容扩路,结合空中“红绿灯”运转流程,就好比是生活中的高速公路。
在现有的战术级空域管理方法中并没有包含切分细化空域的做法,大多是根据一条条固有的空中走廊进行调配管理,这样不仅空域利用率不高,空中走廊中飞机的灵活性也受到限制。通过网格化标识技术将战术级空域进行细化切分,在提高空域利用率、灵活性的同时,也为战术级空域内进行空中“红绿灯”的管控奠定架构基础。
2 “红绿灯”空域管控技术运转流程
2.1 工作原理
以“红绿灯”方式对战场空域情况进行管控,能够更加直观地掌控空域态势,更加合理高效地对空域进行管理,在避免误伤的同时,极大提高作战效能。这种方式以面向任务为驱动,根据不同的作战任务,控制空域网格显示红灯、绿灯或者黄灯,红灯表示火力通道有效、绿灯表示空中机动通道有效,黄灯表示存在风险。
从用户视角来看,主要涵盖空中机动及地面火力单元。对于空中机动,空中走廊由若干个空域网格构成,将包含飞行器当前位置以及一定安全间隔阈度的网格显示为绿灯,飞机通过的空域或者剩余航路则显示红灯,红灯则表示火力弹道可以覆盖此空域。对于火力单元,会根据火力任务及火力计划情况划设火力通道,在火力处于射击状态或射击过程时间段,火力通道则显示红灯,表示飞行器不能进入该区域,需改变航线。射击结束后,火力使用的空域资源释放,空域网格恢复初始状态,颜色显示灰色。
而从空域管理的视角出发,整个监视界面形成统一的红绿灯空域态势图,以及空域控制列表,列表呈现各空域用户单元及权限。权限包含允许飞行、禁止飞行、禁止射击、允许射击等状态。同时这种“红绿灯”控制策略能够处理临机的用空任务,动态调整空域红绿灯运行状态。
2.2 典型场景应用
2.2.1 飞机与火力交互
在网格化战术级空域内有一条航道,与此同时有一条火力通道经过该航道,如图4 所示。从用户视角观察,箭头处为我机当前位置,已经过航道为红色,随着飞机不断前进,红色航道变为绿色,另一条灰色航道为无作业打击时的火力通道。图中白色方块为亮“红灯”,三角形为亮“绿灯”,灰色方块为无作业打击时的火力通道。

图4 飞机与火力交互前“红绿灯”管控图
当火力通道由无作业状态变为可以进行打击作业,此时火力通道亮“红灯”。如果我机按原既定航道继续前行可能发生碰撞,因此,我机只可以在交错点前一块方格空域内做悬停(如直升机)或盘旋等待作业,任何飞行器不能经过火力通道,如图5所示。

图5 飞机与火力交互时“红绿灯”管控图
当火力打击完毕,火力通道由亮“红灯”恢复无作业时的灰色状态。此时可能发生碰撞的危机解除,我机可继续沿着航道前行,如图6 所示。

图6 飞机与火力交互后“红绿灯”管控图
2.2.2 飞机与不明目标交互
在网格化空域内有一条航道,此时航道前方经过地面雷达侦察系统发现,出现不明目标驶入航道,如下页图7 所示,灰色箭头为不明目标。如果我机继续按原既定航道前行,可能发生碰撞或者交火,此时空中“红绿灯”空域管控系统开始运作。
当我机接收到信号,“红绿灯”管控系统运作,及时为我机开辟一条或多条亮“绿灯”的航道,避免与不明目标正面交错,原既定航道此时全部亮“红灯”,禁止一切飞行器进入,如图8 所示。

图7 飞机与不明目标交互“红绿灯”运作管控图

图8 飞机与不明目标交互新航道开辟管控图
2.3 管控成效分析
空中“红绿灯”管控技术相比较传统空域管控技术,最鲜明的特点就是提高了时效性与空域利用效率。
传统空域管控技术运转的时间周期为空域计划时间、侦察计划时间、地面火力计划时间、冲突检测时间、临机调整时间等的总和。空中“红绿灯”管控技术运转的总时长仅仅为“红绿灯”管控时间和各火力单元控制时间的总和。当我机在指定空域内遇到突发状况,可以根据“红绿灯”网格显示和管控策略及时作出调整,极大地提高了时效性。
空中“红绿灯”管控技术不仅多层高可以同时利用,通过网格化空域切分,将整体空域进一步编码细分,使所有节点可以同时关注“红绿灯”情况,然后根据指示进行随动操作,提高了空域利用效率。
3 冲突告警防碰撞技术
安全性是战术级“红绿灯”空域管控技术实施的基础保障。传统的冲突检测方法是通过计划监控,以甘特图的方式进行检测告警。相比较传统的告警方式,网格化后具有“红绿灯”性质的冲突检测告警技术具有目标位置明确、图形化后更直观以及实时性更强的优势。研究网格化战术级空域内空域冲突问题,根据飞行曲线模型、火力弹道模型,推演出具有“红绿灯”性质的冲突检测告警技术。该技术对指挥决策有着强有力的辅助作用,在态势图上可以定义为“黄灯”。
3.1 设置安全阈值
通过在网格化战术级空域内设置安全阈值,可以保障每一条航道在有临时或计划外火力覆盖时的安全。当空域内航道附近有火力打击,火力弹道与飞行航道间的距离接近某一安全阈值时,“红绿灯”管控系统作出判断,为飞机开辟新的航道,避免碰撞发生,原航道亮“红灯”,处于禁飞区。此时亮“红灯”航道所在的网格化空域在用户视角看亮“黄灯”,起到警示作用,即提示用户此空域内可能发生碰撞。如图9 所示,箭头表示我机航向,灰色为避免碰撞设置为禁飞的航道。

图9 根据安全阈值防碰撞示意图
3.2 网格化防碰撞阵地
网格化战术级空域经过空间编码后,可以细分成每一块空间,从俯视的角度看,可以将每一块空间看成一个二维平面上的网格化小型阵地。当火力覆盖该战术级空域时,可以通过有序排列的网格化小型阵地,设置弹道航路,通过设置的安全阈值与空域内的飞行航道避免交叉,防止碰撞。如图10 所示,我机所在阵地亮“红灯”,此时阵地内火力停止射击;火力打击时可能与我机发生碰撞的火力阵地同样停止射击,亮“红灯”;经过推算可以安全进行火力打击的阵地进行打击作业。
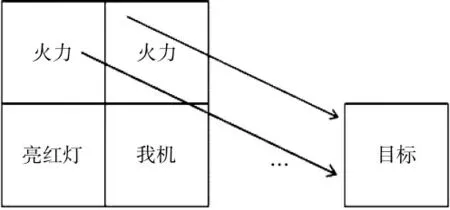
图10 网格化防碰撞阵地示意图
3.3 防冲突调配建模
针对可能发生的航道与临时火力弹道或者目标敌机冲突碰撞的情况,建立防冲突调配模型,通过在达到安全阈值前开辟新的航道来避免碰撞的发生。
假设通过安全开辟的新的航道避免碰撞的概率为Ps,避免碰撞开辟的可能安全的新航道有n条,n 条航道对应的绝对安全通道的概率为Pni,则有

式中,N 为针对可能发生碰撞采取的驶入新航道的次数,如果Pni=Pn,则有

由于目标敌机是由敌方指挥控制,航向无法确定,且可能来袭飞行器众多,因此,在开辟的新航道仍有可能与目标敌机交互碰撞的情况下,假设每次开辟的新航道成功避免冲突碰撞的概率为Pn,开辟新航道的次数为

对于开辟新航道的次数Nob,其也可以用来表示成功避免冲突碰撞的概率,此时:

式中,No为探测到的来袭目标总数,Nob为开辟的新航道的次数,Pn为每次开辟的新航道成功避免冲突碰撞的概率,Nch为避免冲突碰撞需要开辟的新航线的数量,Ps为通过安全开辟的新的航道避免碰撞的概率。
3.4 仿真试验分析
在3.3 节中防冲突调配模型的基础上,设定在一次避免冲突进行飞行调配的过程中,预计开辟新航道的过程进行3 次,每次开辟的航道数不定,规划的总航道数为10 条。当大约平均4 架/min 的目标敌机进入我方空域,经过调配避免冲突的平均时间为0.75 min,Ps=0.8,分别对可能调配的结果进行计算,计算相对应的防冲突调配效能。表1 为经过仿真实验,从全部试验结果中提取的典型代表性的几组数据。

表1 开辟不同航道数下的防冲突调配效能
通过试验仿真结果分析得出,当预计开辟新航道进行冲突避免时,经过调配开辟新航道的次数依次为5,3,5 时,防冲突调配效能最大,此时防冲突调配模型为阶梯状。当经过调配开辟新航道的次数为1,2,7 时,防冲突调配效能最小,此时防冲突调配模型为发散状。
4 结论
未来的战争一定是空地一体、一域多层的联合作战。新军事变革后,空中突击旅、合成旅等新式部队组织的出现,更加稳固了空地协同作战的方式,增强了陆军地面部队与陆军航空兵的联系。
空域管控技术是空地联合行动作战的关键技术,是连接地面与空中部队的“纽扣”。本文针对战术级空域管控,提出了空中“红绿灯”技术。通过对空域切分、空中“红绿灯”运转以及冲突检测告警的深入研究,在原有的战场空管系统上形成了一套科学、高效的战术级空域管控技术。该技术一方面提高了时效性,地面力量可以随着空域情况随变;另一方面提高了空域利用效率,多层高可以同时利用。战术级空中“红绿灯”空域管控技术,随着我军装备、体系的不断进步可以不断升级、革新,可供我军在未来空地协同作战中的战场空域管控中参考。