PCP系统的优化对船舶水下电场的抑制作用*
2021-02-01谭浩,陈聪,沈滨
谭 浩,陈 聪,沈 滨
(1.海军工程大学 电气工程学院,湖北 武汉 430033;2.海军工程大学 基础部,湖北 武汉 430033;3.武汉东湖学院 机电工程学院,湖北 武汉 430212)
声场和磁场一直都是水下目标探测主要的信号特征源,但是消声降噪和消磁技术的不断发展与成熟,使得探测这两种物理场信号的难度不断增大,于是海水中的电场信号逐渐受到了更大的关注,因为无论船舶是静止还是运动,其周围海水中都存在电场[1]。传感器和信号处理技术的不断发展,已经使水下的电场成为除声场和磁场外另一个重要的暴露源[2]。
船体由金属构成,主要成分方面,船身是钢,螺旋桨是铜。海水中,钢和铜因极化电位不同而产生的腐蚀电流和阴极保护(Cathodic Protection,CP)系统输出的防腐电流会经海水由船壳流向螺旋桨,再通过螺旋桨主轴及各机械部件流回船壳形成回路,从而在海水中产生0.1 Hz以下的准静态电场[1],如图1所示。如果船身防腐涂层不均匀,也会造成局部腐蚀更加剧烈,那么腐蚀电流也会在船身的不同区域之间形成“船壳腐蚀区域—海水—牺牲阳极”回路。而静态电场经过螺旋桨的调制,还会形成频率与螺旋桨转动频率一致的轴频电场,其信号的频谱特征明显,也容易成为船舶水下的暴露源[3-5]。
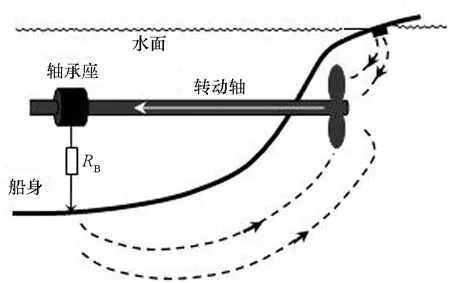
图1 产生水下电场的电流回路Fig.1 Current loop of electrostatic field underwater
总的来说,船体的腐蚀和水下电场的形成是由于船壳不同金属成分的极化电位存在差异,因此,船身电位的均匀化程度就能够影响船体的腐蚀状况和水下的电场目标特征。
本文主要针对牺牲阳极阴极保护系统的优化在船身电位均匀化方面能够起到的作用进行研究。牺牲阳极阴极保护系统也称被动阴极保护(Passive Cathodic Protection,PCP)系统,其工作原理是将极化电位较低的金属(如牺牲阳极Zn等)与被保护的金属(如构成船体的Fe和Cu等)相连,通过牺牲阳极的腐蚀所产生的电流来保护船壳。因此,牺牲阳极的数量与分布能够改变船体表面的电位分布,进而影响水下电场的目标特征。
1 边界元模型
为了计算船身电位均匀化对船体防腐和水下电场的抑制作用,采用边界元法建立了计算模型。模型中,海水视为均匀且连续的电解质,电导率为4 S/m,其中不存在净电荷,所以静电场服从Lapace方程[6]。船体表面电位和电流之间的关系由实验测得的极化曲线决定。
海床和空气的电导率相对于海水而言非常低,如果海水很深,则可以近似认为海床-海水界面不存在电流;一般航行状态下场源在空气-海水界面附近,可用镜像法求解[7];牺牲阳极可视为恒电位源;船身为阴极表面(分为涂层保护区域与涂层脱落区域两种情况),以材料的电极化方程或极化曲线作为边界条件;绝缘部位可认为电流为0且电位值已知。
船身材料为钢(有涂层覆盖),螺旋桨为铜(无涂层覆盖),水下部分长约117 m,宽约15.6 m,最深处约6.7 m。场强测量平面为边长400 m的正方形,位于船体下方50 m深处。设置以龙骨为轴呈对称分布的四块涂层完全脱落的区域,靠近船头两块区域面积约为6.4 m2,靠近船尾两块区域面积约为3.3 m2,画点单元区域添加18块牺牲阳极,如图2所示。
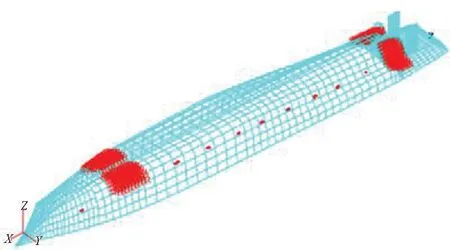
图2 船体水下模型Fig.2 Model of the ship underwater
2 电位均匀化对防腐和水下电场的作用
由以上模型,分别计算得到船体自然腐蚀和PCP系统防腐两种情况下的船身电位分布和测量平面电流密度的分布,计算结果如图3和图4所示。用电流密度表征测量平面电场的优势在于更利于分析不同的特征量:其分布反映了水下电位变化的梯度,与电导率的比值则为电场强度的值。
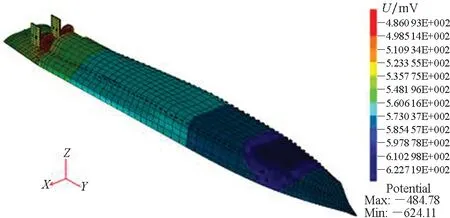
图3 自然腐蚀的船壳电位分布Fig.3 Potential distributing of the ship in natural corrosion
计算结果表明,自然腐蚀时的船身电位基本处于-610~-520 mV之间,高于保护区间-1 100~-800 mV,腐蚀区域与螺旋桨之间的电位差达到了170 mV左右,所以船体处于腐蚀状态;而PCP系统防腐时,船身电位基本处于-840~-770 mV之间,腐蚀区域与螺旋桨之间的电位差也减小到100 mV左右,腐蚀状况得以缓解。水下的测量平面处,参考Y方向的电流密度,计算结果如图5和图6所示。

图6 PCP防腐的测量点电流密度Fig.6 Current density underwater of the ship in PCP anticorrosion
由计算结果可知,随着正横距的增大,静电场信号的幅值衰减较快,且在同一水深条件下,正横距为0B和0.5B(B为船宽)、1.0B的信号明显大于1.5B和2.0B的信号,所以在后续实验中,重点对正横为0B、0.5B和1.0B的电场峰-峰值进行分析。
由图5和图6还能够发现,自然腐蚀时测量平面的电流密度峰值达到了约0.28 mA/m2,而PCP防腐后峰值则减小到0.23 mA/m2左右。这个结果说明,尽管添加PCP系统后会增大防腐电流,但是,只要针对阳极的数量和分布进行合理的设计,就能够在起到防腐作用的同时对水下电场的目标特征产生抑制作用。
3 优化PCP系统
电解液中,阴极的腐蚀程度与阴、阳两极的极化电位差关系密切,所产生的腐蚀电流与水下电场的大小趋势一致。而船壳的涂层状况如果并不均匀,甚至出现局部脱落的情况则会增大电位差。由于船身电位相对于水下的电场信号更易测量,对阴极保护系统的优化可致力于船身电位均匀化的目标上[8]。
当牺牲阳极的数量较少时,如图7左半部分所示,假设牺牲阳极的数量只有1个,为对腐蚀区域起到保护作用,防腐电流就需要保持一定的强度;如果适当增加阳极数量,如图7右半部所示,为达到与左半部分相同的防腐效果,所需的防腐电流可由多个阳极共同提供,各个阳极的输出都会相对减小,若同时出现多个防腐区域,电流所途经的距离也会相对缩短。因此,阳极数量适当增多时,船身电位的均匀化程度会得到提高,这样就能够在防腐的同时起到减弱水下静电场的作用。这也就是阴极保护系统的优化原则。
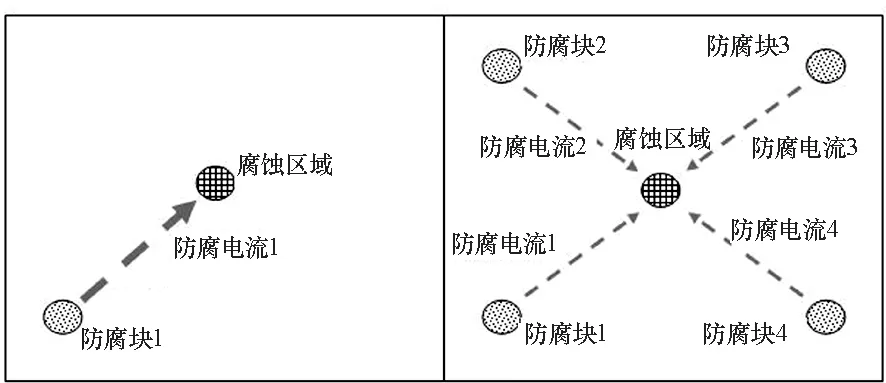
图7 PCP系统优化示意图Fig.7 Sketch of optimization in PCP system
根据以上优化原则,在图2模型中设置78块牺牲阳极,如图8所示,计算得到船身与水下的情况如图9和图10所示。
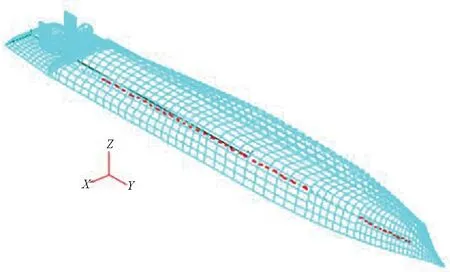
图8 添加牺牲阳极的船体水下部分Fig.8 Underwater part of the ship with more sacrificial anodes
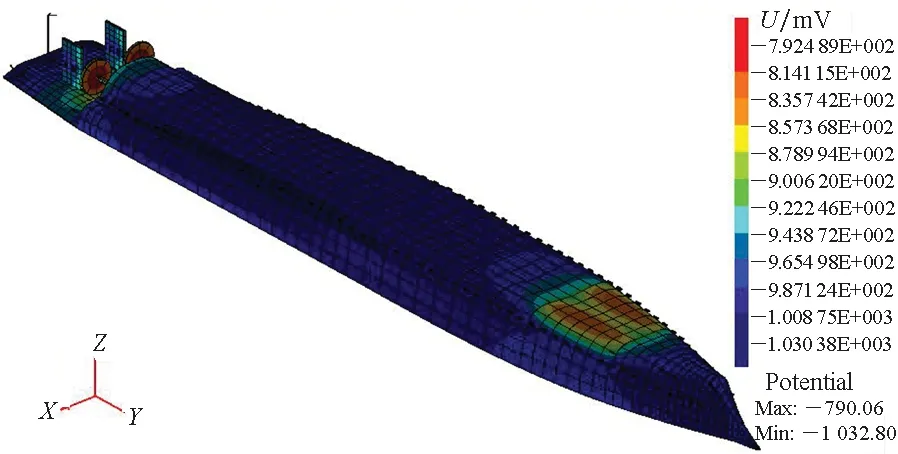
图9 添加牺牲阳极后的船身电位Fig.9 Potential of the ship with more sacrificial anodes
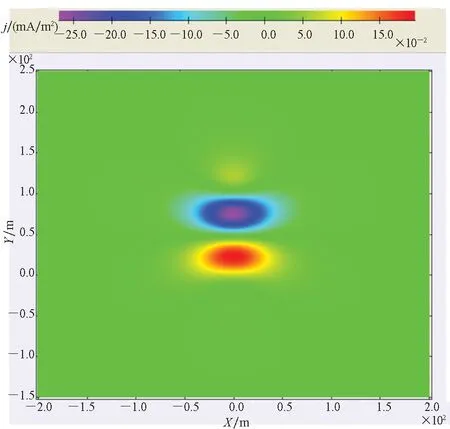
图10 添加牺牲阳极后的测量点电流密度Fig.10 Current density underwater of the ship in PCP anticorrosion with more sacrificial anodes
可以发现,此时的船身电位基本处于-1 050~-960 mV之间,电位差进一步减小至约60 mV,起到了较好的船体防腐作用;同时,水下电流密度的峰值也降低到0.20 mA/m2以下,低于优化前的水平。可见,优化后不仅增强了防腐功能,而且尽管牺牲阳极的数量增加了,水下静电场依然得到了进一步的抑制。
4 实验室船模实验
为了对仿真结果进行验证,在实验水池进行了船模实验,坐标方向选取与仿真相同的方向。
实验水池长、宽和深分别为12 m、7 m和1.2 m。船模长272 cm,宽34 cm,吃水9.14 cm,船体的材料为钢,螺旋桨为镍铝青铜,部分区域为绝缘材料,美人架为钢。船模螺旋桨的转轴上安装有滑动变阻器,通过调整其阻值来模拟船壳整体的涂层完好程度。为了增强实验效果,船用漆仅涂一层,并利用刀片在船体增加几处破损位置。实验过程示意图如图11所示。

图11 实验过程示意图Fig.11 Schematic diagram of the experiment
按照模型的缩比状况配置人工海水,海水电导率设置为2.61 S/m,船模吃水深度约为9.2 cm。电场测量传感器为低噪声全固态Ag/AgCl电极,距离水面的深度同样按照相同比例进行缩比,布置于水下1.0B的深度,在该深度上分别测量正横距0B、0.5B、1.0B测线上的电场信号。
为了能够有效测量水下电场信号,研制了低噪声电场放大器,信号带宽为0~0.5 Hz,前置放大器增益为60 dB,在0.1~10 Hz范围内,噪声峰-峰值小于1 μV/m。
实验过程中分别采用局部(减摇鳍、美人架和螺旋桨)牺牲阳极防腐(6个Zn块)和全船牺牲阳极防腐(16个Zn块)来对比两种情况下的船身电位和水下电场特征,其中全船防腐多出的10个Zn块基本均匀布置于船底(如此设计牺牲阳极的数量和位置只是相对于局部而言定性地预计能够使电位更加均匀,是否为最佳的优化方案则需要通过边界元建模进行定量计算)。将测量电极布放于水池中央,利用电机拖动装置调整缩比船模的运动速度,船模螺旋桨旋转螺旋桨运转速度分别为61 r/min、90 r/min、140 r/min和240 r/min,对应的船模行进速度分别约为:6.70 cm/s、10.08 cm/s、17.14 cm/s和26.60 cm/s。
在不同航速、不同涂层完好程度下测量到的轴电流、参比电极电位和不同正横距的电场峰-峰值在局部PCP防腐和整体PCP防腐两种状态下的实验测量结果如表1和表2所示。
其中,由于电极尺寸相对于船模而言较大,且由于实验条件的限制,电极难以完全固定于船身,船模在行进过程中会造成电极的晃动甚至脱落,水流也会导致电极极化的不稳定,所以船身电位仅用参比电极进行总体的表征,用来判定船模整体是否处于保护区间,参比电极安装于船底几何中心位置。
对比表1和表2中参比电极的电位可以发现,局部PCP防腐和整体PCP防腐两种情况下,参比电极的电位基本上位于保护区间内,说明两种状态下都对船体起到了较好的防腐作用。而整体防腐时参比电极的电位相对更低,说明牺牲阳极数量的增多会使防腐电流增大,起到了更好的防腐效果。当然,如果牺牲阳极的数量过多,会造成船体的过保护,也会增大水下电场的强度,所以牺牲阳极的数量需要通过对船体的大小、结构和材料等具体参数进行计算后才能确定。
要判断防腐电流的增大是否必然导致水下电场目标特征的增强,可以考察变阻器阻值和航速相同时,两种防腐状态在水下产生的电位峰-峰值。由表1和表2可知,涂层完好程度相同时相同的测量点在绝大部分情况下,整体防腐的电场峰-峰值相对于局部防腐时的值更低,这说明牺牲阳极的增多尽管会增大防腐电流,但是通过合理优化牺牲阳极的个数和位置,可以在保证防腐的条件下,达到降低舰船电场的目的,而其中优化的原则与仿真计算时的原理是一致的——尽可能使多个牺牲阳极去保护同一块腐蚀区域,虽然总的防腐电流会增大,但是每个防腐模块输出的电流则会相对减小,从而使得整个船体的电位更加均匀并使水下电场得到抑制。
由表1和表2还能够看出,在相同的航速下随着涂层电阻的增大,轴电流逐渐减小,而水下电场值却呈上升趋势,这与通常对船舶水下电场成因的电流走向的认识存在出入。经分析,由于存在数量较多的牺牲阳极,其极化电位相对于船壳腐蚀区域和螺旋桨的电位更低,所以经海水流向螺旋桨及转轴的腐蚀和防腐电流都会降低,更多的电流会直接经过牺牲阳极和腐蚀区域或在牺牲阳极之间直接流进海水。
另外,随着变阻器阻值的增大,轴电流呈下降趋势,这一点是正常的,表明涂层越完好,产生电场回路中的电流在减小。不过对于局部防腐,涂层破损较高时,随着航速的增加,轴电流呈下降趋势;涂层较为完好时,随着航速的增加,轴电流呈上升趋势;而整体防腐时,在相同的涂层下,随着航速的增加,轴电流的变化却不大。分析其中的原因在于:航速的加大会使材料的去极化作用增大、极化电阻减小。局部防腐时,如果变阻器阻值较小,电流主要经“船壳—海水—螺旋桨”完成回路,所以航速提高带来的去极化作用对轴电流的影响比较大;如果变阻器阻值增大,则“船壳—海水—螺旋桨”回路中的电流会有一部分分流到“船壳腐蚀区域—海水—牺牲阳极”回路,所以去极化作用对轴电流的影响被弱化;到了整体防腐,由于牺牲阳极的数量增多,“船壳—海水—螺旋桨”回路中的电流会进一步减小,去极化作用对轴电流的影响则进一步被弱化。
5 结论与展望
本文通过仿真计算,分析了PCP系统牺牲阳极的数量和分布对船身电位和水下电场的影响,并在此基础上进行了实验。结果表明,以保持船身电位的均匀为目标对PCP系统进行优化,能够同时起到防腐和抑制水下电场的功能,且相对于以水下电场的抑制为目标的优化方式,本文方法更加便于测量与评估优化效果的实际操作。
不过,由于PCP系统在安装完成后不易更改其牺牲阳极的分布,且由表1和表2可知,随着涂层状态的改变,尽管牺牲阳极在短时间内没有太大变化,但是水下的电场信号却依然是变化的,这就说明牺牲阳极输出的防腐电流仅受环境因素影响(如温度、海水电导率、船壳腐蚀状况甚至航速等),难以人为的控制,且电流输出不稳定。而且,随着牺牲阳极的不断腐蚀,也需要定期更换阳极块,这些都是PCP系统存在的缺陷。
相较而言,PCP系统的防腐电流相当于“恒压输出”,而外加电流阴极保护(Impressed Current Cathodic Protection,ICCP)系统的防腐电流则相当于“恒流输出”。尽管在建造完成后,两种阴极保护系统中阳极的数量和位置都难以改变,但ICCP系统防腐电流的输出更加易于人为控制和监测,只要维持每个辅助阳极输出电流与牺牲阳极的输出电流一致,则仍然可以达到防腐和控制水下电场的目的。
所以,为了使船舶在不同海域、不同航速、不同涂层状态下均能得到有效的保护且能够抑制水下电场的目标特征,应进一步对ICCP系统开展研究,实现ICCP为主、PCP为辅的一套系统,这也是下一步的研究重点。
