利用最小二乘支持向量机的短临降雨预测模型构建
2021-01-27赵庆志姚顽强
赵庆志 刘 洋 姚顽强
1 西安科技大学测绘科学与技术学院,西安市雁塔路58号,710054
降雨的发生受多种气象变量、位置和季节的影响[1],近年来,基于GNSS技术反演PWV并研究其与降雨间的相关关系逐渐发展成为新的研究领域,一些学者根据降雨发生前PWV的异常变化特征,构建基于最小二乘法的简单短临降雨预测模型,以描述PWV与降雨间的相互关系[2-4]。
支持向量机(SVM)的相似版本——最小二乘支持向量机(LS-SVM)由Suykens等于1999年提出。SVM算法需要不敏感损失函数ε来解决特征空间中的凸二次规划问题,而LS-SVM仅需最小二乘损失函数以获取高维空间中一组线性等式,进而提高学习速率并降低SVM中凸规划的复杂度。此外,相比于SVM算法中惩罚参数、核参数sig2及不敏感损失函数ε等3种关键参数复杂的选取策略,LS-SVM仅需确定正则参数gam及径向基函数(RBF)参数sig2即可构建相应模型[5]。LS-SVM算法已成为一种解决非线性分类、函数估计及回归的重要理论,并被应用于多种学科[6-7]。
传统的简单降雨预测模型基于最小二乘原理拟合PWV/ZTD时变信息,以预测未来短期内发生的降雨事件。该类降雨预测模型普遍存在的缺陷是:1)降雨预测因子(PWV/ZTD)单一;2)降雨预测精度较低,预测正确率仅为80%,错报率介于60~70%之间[2-4]。因此,本文首次将LS-SVM算法用于构建短临降雨预测模型,将多种与降雨相关的气象参数添加进训练样本,并分别从以上两个方面改进传统降雨预测模型。
1 理论和数据
1.1 GNSS获取PWV
GNSS信号穿过对流层时会受中性大气延迟效应的影响,测站天顶总延迟(ZTD)可由信号倾斜路径总延迟(STD)通过映射函数投影至天顶方向得到。本文使用全球投影函数(GMF)将不同高度角的卫星信号投影至GNSS测站天顶方向,并忽略测站卫星信号弯曲的影响[8]。
ZTD主要由天顶静力延迟(ZHD)和天顶湿延迟(ZWD)组成[9],其中ZHD可通过saastamoinen模型求解。ZTD与ZHD之差即为ZWD,PWV与ZWD之间的转换公式为:
(1)
式中,ρ为液态水密度;ξ为PWV和ZWD之间的转换参数[10]:
ξ=[-1×SGN(L)×1.7×10-5|L|HSN-
[0.165-(1.7×10-5)|L|1.65]+R
(2)
式中,L为测站纬度;doy为年积日。当GNSS测站位于南/北半球时,HSN分别为1.25和1.48,SGN(L)分别为-1和1。通过式(1)和式(2),可计算精度在±1 mm范围内的PWV时间序列[10]。
1.2 最小二乘支持向量机

z(x)=wTϑ(x)+b
(3)
式中,w为权重向量;ϑ(·)为投影函数;b为阈值。将回归等式转化为最小化代价函数约束的优化问题:
(4)
式中,δ为正则化参数,作用为平衡模型的复杂性和精度;ξI为输入向量xI的训练误差。式(4)对应的约束条件为:
zI=wTϑ(xI)+b+ξI,I=1,2,…,N
(5)
与SVM不同的是,LS-SVM使用等式约束而非不等式约束。基于上述等式,拉格朗日函数可表示为:

(6)
式中,αI为拉格朗日乘子。函数逼近模型为:
(7)
式中,K(x,xI)为核函数,本文使用径向基函数。
1.3 数据简述
选取南洋理工大学和新加坡国立大学2个GNSS并址气象站(NTUS和SNUS)2010~2012年的数据,其中GNSS数据经GIPSY/ OASIS Ⅱ 处理得到ZTD数据[11],ZHD数据经saastamoinen经验模型计算得到,PWV数据经式(1)计算得到。NTUS站气象数据有温度(T)、相对湿度(RH)、露点温度(DPT),SNUS站气象数据有气压(P)、温度(T)、相对湿度(RH)。此外,新加坡地区的降雨主要受季节影响,大多发生在东北雨季及西南雨季期间,强对流型降雨出现在东北雨季的傍晚时段。因此,本文考虑将年积日(doy)和天积时(hod)作为与降雨相关的时间参数。
2 气象参数特征分析
2.1 参数时序分析
降雨的发生受多种气象参数的影响,选择与降雨相关性高、易获取的气象参数对构建精度高、适用性强的LS-SVM降雨预测模型有很大帮助。图1和2分别为NTUS站和SNUS站降雨及其相关气象参数的时变序列。由图可知,降雨发生前,PWV、RH、P及T都出现上升趋势;降雨发生时都表现出下降的趋势,且T的下降速率及幅度均大于PWV;而RH在降雨发生时表现出上升的趋势,DPT则表现出与之相反的变化趋势。
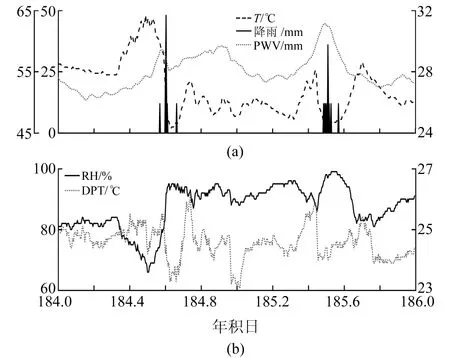
图1 NTUS站2012年doy184~186降雨及其相关气象参数的时变序列Fig.1 The time series of rainfall and its correlated meteorological parameters at NTUS station over the period of doy 184-186 in 2012
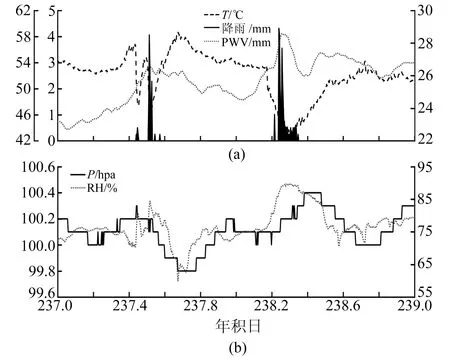
图2 SNUS站2011年doy237~239降雨及其相关气象参数的时变序列Fig.2 The time series of rainfall and its correlated meteorological parameters at SNUS station over the period of doy 237-239 in 2011
2.2 相关性特征分析
图3为2010~2012年2个测站降雨及多种参数(doy、hod、T、DPT、RH、PWV)的相关系数示意图,可以看出,NTUS站中T和RH表现出强负相关特征,相关系数为-0.89;T和DPT的相关系数为0.5,表现出中等正相关特征;DPT和doy、RH和PWV及T和hod都表现出弱正相关特征,相关系数约为0.3。此外,降雨与气象参数间并无弱及以上相关性特征,表明降雨与本文所选气象参数相关性较弱,还可能与其他气象参数相关。同时PWV与降雨并未表现出强相关性特征,表明传统降雨预测模型仅依靠PWV不能达到构建高精度降雨预测模型的目的。
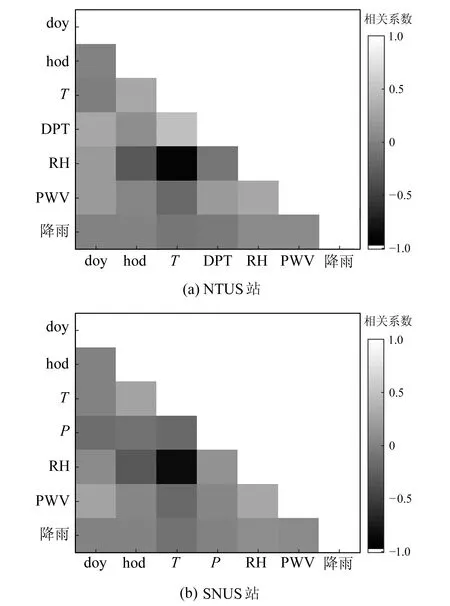
图3 气象参数、时间参数与降雨间相关系数示意图Fig.3 Correlation coefficient between rainfall and meteorological parameters, time parameters
3 基于LS-SVM的降雨预测
3.1 实验流程设计
LS-SVM降雨预测的实验流程主要分为模型构建、仿真实验和预测实验3个部分。1)模型构建:首先对训练数据进行均衡处理和归一化处理,同时对缺失数据进行删除。设置决定LS-SVM模型精度的正则化参数gam及RBF核参数sig2的范围,在将训练数据样本输入LS-SVM模型之前需要将降雨数据和PWV/气象数据分开并设置时差为55 min,目的是构建当前PWV/气象数据与未来55 min降雨事件间的高维非线性关系(基于LS-SVM模型)。由于大多数降雨持续时间超过35 min,因此降雨预测时间区间扩展为未来20~90 min。最后将训练样本输入LS-SVM模型进行训练,并基于网格搜索法和交叉验证法对参数进行寻优,得到基于LS-SVM的短临降雨预测模型。2)仿真实验:对训练数据进行归一化处理,并输入LS-SVM降雨预测模型得到仿真降雨数据,根据正确率(TFR)和错报率(FFR)评估仿真降雨数据与实际降雨数据间的吻合度。3)预测实验:将次年数据进行归一化处理后输入LS-SVM降雨预测模型,得到次年预测降雨数据,并根据TFR和FFR两个指标评估预测结果的精度。
3.2 数据预处理
当多数类样本数据占样本数据的比例远大于少数类样本数据时,分类器可预测样本中多数类样本数据而完全忽略少数类样本数据[10]。图4统计了NTUS站和SNUS站2010~2012年降雨类数据和非降雨类数据的数目后发现,二者的均值比例为1∶39,表明降雨类事件与非降雨类事件存在严重失衡的特征[12]。利用降采样方法得到相同数目的降雨类数据和非降雨类数据[13],并将二者组合为训练数据集。
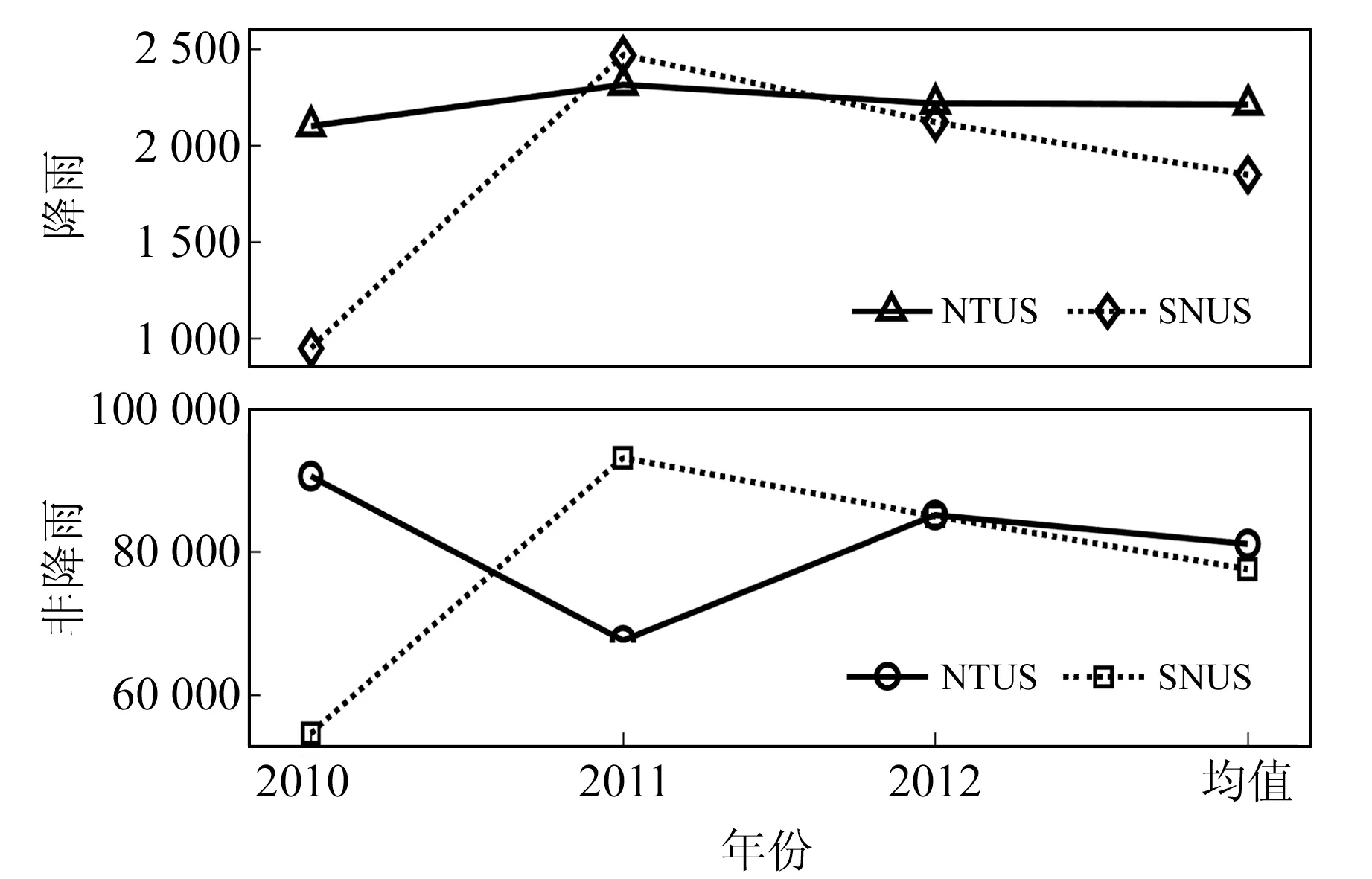
图4 NTUS站和SNUS站降雨及非降雨数据Fig.4 The schematic diagram of rainfalland non-rainfall data at NTUS and SNUS stations
3.3 仿真实验
以NTUS站2010年仿真实验为例,首先利用降采样方法对气象和时间参数进行均衡化及归一化处理。正则化参数δ/gam和RBF核函数ϖ/sig2对LS-SVM模型的精度起着关键性作用,本文基于网格搜索法和交叉验证法确定δ/gam和ϖ/sig2的最优值。其次将6种预报因子(doy、hod、T、DPT、RH、PWV)与降雨数据输入LS-SVM模型进行训练,得到LS-SVM降雨预测模型。最后将6种气象数据经归一化后输入LS-SVM降雨预测模型,得到NTUS站2010年降雨仿真结果。SNUS站的仿真实验流程与上述流程一致。
本文使用正确率(TFR)和错报率(FFR)来评估LS-SVM降雨预测模型的精度:
(8)
式中,Nt为正确预报降雨次数,即预测降雨时段内实际发生的降雨次数;Nf为错误预报降雨次数,即预报时段内实际未发生降雨的次数;Nreal为实际发生的降雨次数。
图5为SNUS站和NTUS站2010~2011年降雨仿真结果,由图可见,2个测站的降雨仿真TFR均接近100%,而SNUS站2010年和2011年的FFR均大约为44%,NTUS站2010年的FFR为53%,2011年的FFR为31%。综上所述,SNUS站和NTUS站在2010~2011年的降雨仿真TFR均值为99.94%,FFR均值为43%。结果表明,LS-SVM模型可仿真1 a中所有的降雨事件,且错报率低于传统降雨预测模型,可用于预测2011~2012年的降雨事件。
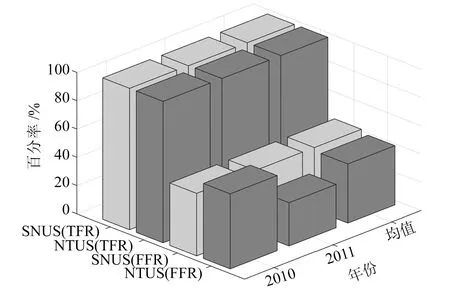
图5 NTUS站和SNUS站2010~2011年降雨仿真实验结果Fig.5 The simulated experimental results of rainfall atNTUS and SNUS stations over the period of 2010-2011
3.4 预测实验
以NTUS站2011年预测实验为例,首先对6种数据进行归一化处理,将数据输入仿真实验LS-SVM降雨预测模型中得到降雨预测数据,再根据TFR和FFR对数据精度进行评估。SNUS站的预测实验流程与该流程一致。
图6为SNUS站和NTUS站2011~2012年降雨预测结果,由图可见,2个测站的降雨预测TFR相近,均接近100%;SNUS站与NTUS站2011年的FFR均小于40%,2012年FFR分别为42.58%和45.79%。综上可知,SNUS站与NTUS站在2011~2012年的降雨预测TFR均值为99.57%,FFR均值为40.42%。因此,本文基于LS-SVM的短临降雨预测模型可预测未来20~90 min内99%的降雨事件,且FFR为40%。与最小二乘线性降雨预测模型相比,本文模型预测结果的TFR提高近10%,FFR降低近20%。

图6 NTUS站和SNUS站2011~2012年降雨预测实验结果Fig.6 The forecasted experimental results of rainfall atNTUS and SNUS stations over the period of 2011-2012
4 结 语
通过分析降雨及多种相关气象参数的时序信息发现,降雨期间多种气象参数均表现出明显的异常变化,表明气象参数与降雨间存在非线性关系。与PWV/ZTD描述的降雨事件相比,多种气象参数(T、RH、DPT、P)及时间参数(doy及hod)与降雨间的相互作用更强。结论如下:
1)通过分析多种气象参数及时间参数与降雨的相关性特征发现,降雨与参数间均表现出弱相关性特征,表明降雨仍可能受其他气象参数的影响,因此传统降雨预测模型仅利用PWV不能达到高精度降雨预测的需求。
2)LS-SVM算法在解决函数估计及回归问题方面表现出良好的效果,基于该算法构建短临降雨预测模型仿真实验的结果表明,该模型可预测近99%的降雨事件,FFR为43%。
3)预测实验结果表明,基于LS-SVM的短临降雨预测模型可预测未来20~90 min内99%的降雨事件,且FFR为40%。与最小二乘线性降雨预测模型相比,本文预测模型的TFR高出10%,FFR降低近20%。
本文在参数选取及算法方面对传统的基于最小二乘方法拟合PWV/ZTD的降雨预测模型进行了改进,结果表明,本文模型的精度高于传统模型。
致谢:国际全球导航卫星系统服务(IGS)提供GNSS数据,南洋理工大学和新加坡国立大学提供免费公开的气象数据,在此一并表示感谢。