搜救直升机应急通信及定位追踪系统总体设计*
2021-01-26张洪彬屈明佑
张 一,张洪彬,屈明佑
(1.成都天奥信息科技有限公司,四川 成都 611731;2.北海第一救助飞行队,山东 蓬莱 265600)
0 引言
直升机搜救是海上人命救助中最为快捷、最有效的救助方式,也是救助搜寻和现场救助处置的重要平台。搜救直升机具有出动速度快、机动灵活;视野广、搜索范围大,居高临下易发现海上目标;可悬停在空中救人或者快速转运人员,适合危重创伤或者特殊人员急救等优点。此外,海上立体救助中,搜救直升机还担负着早于救助船提前抵达现场,与遇险船只进行有效的沟通;向救助指挥和其他救助力量传达最新的遇险信息,提供现场险情、气象、海况等情况报告等任务[1]。
如何更快找到遇险船只和遇险者,为实施救援赢得时间和最佳时机,同时确保直升机飞行和机组安全,是搜救直升机飞行员、飞行队运控中心和救助指挥中心最为关切的问题。搜救直升机装备的常规空管通信、导航和监视手段受限于视距传输,在外远海和低空飞行时能力不足,为了确保飞行安全并充分发挥搜救直升机的海上救助优势,研制全空域无盲区、运行稳定、信息直观的搜救直升机应急通信和定位追踪系统,是我国海空立体救助体系建设、飞行队运控系统建设中需要研究的重要内容[2]。
1 搜救直升机特性分析
1.1 搜救直升机运行体制
我国现有搜救直升机都不属于国家航空器,在实施任务时领受救助指挥中心任务,同时向民航空管单位申请空域和管制协调。北海第一救助飞行队坚持民航体系管理的发展理念,现已通过CCAR 135 部、145 部运行合格审定。近年来,为加强搜救直升机资源管理,实现航空器与救助基地网络有机结合,强化运行系统,夯实安全保障基础,提高救助工作效率,北海第一救助飞行队在全力推进运控中心的建设工作。
2014 年3 月马航MH370 失联事件在全球引发极大震动,对民航安全管理工作提出了严峻挑战。2016 年8 月,国家民航局在发布了《航空承运人航空器追踪监控实施指南》中明确,由航空承运人以15 分钟或更短周期,针对每架飞行中的航空器在地面记录并更新航空器4D 位置信息(经度、纬度、高度、时刻)的过程,实施航空器4D/15 追踪。CCAR 135 部和CCAR 91 部实施运行的航空运营人可参照本通告实施例行航空器追踪监控。
1.2 搜救飞行任务特性
搜救直升机在实施搜索救援任务时,面临着搜救环境复杂、飞行方式复杂、指挥协调复杂等问题[3][4]。
(1)海上、海岛、陆上救援时,面对着近中远各种海域、空域和复杂的山谷地形,外海远距离飞行可达110 海里。
(2)面对恶劣天气,经常是大风、高海况下实施搜索救援。受风浪影响,以视距传输的船—岸、船—飞机之间的无线通信和监视手段的距离严重降级。
(3)从收到救助报警、领受救助飞行指令到现场搜索和救助作业时,涉及的联络协调对象包括待救船只、待救助人员、运控中心、空管单位、海事单位、救护单位等。多方之间需要快速联络协调时,只能依靠船舶甚高频调频(Very High Frequency Frequency Modulation)、空管甚高频调幅(Very High Frequency Amplitude Modulation)、船载海事卫星电话、陆上公网手机等方式进行;联络双方不能直接通话时,则需要靠话音转达报告。缺少直观的数据化、信息化的通信指挥手段。
(4)受天气变化、续航能力、承载能力限制,搜救直升机可能需要反复进入退出搜救现场,随时可能调整飞行计划,并及时协调通报相关单位确认,地空联络频繁。
(5)搜索时以300 米以下低高度飞行,海上悬停时可达10 米甚至更低高度,传统的民航通信和监视手段低空盲区效应明显,运控中心无法获取航空器飞行状态。
(6)飞行机动性大,实施小半径、大坡度转向时航空器姿态变化快,造成机载无线信号可靠性下降。
1.3 搜救直升机机载通信监视装备情况
目前,交通运输部4 个救助飞行队自有20 架中大型救助直升机(4 架S-76C+、4 架S-76C++、8 架S-76D 和4 架EC225)。主要机载通信及监视装备情况如下:
(1)机载甚高频(Airborne Very High Frequency)航空电台。
(2)机载短波(Airborne High Frequency)航空电台。
(3)机载空管应答机。
(4)机载甚高频(VHF)海事电台。
(5)机载铱星设备Sky Connect Tracker III(仅S-76D 机型配置)。
可见,目前我国搜救直升机大部分只配置了常规的机载通信和监视装备,可与空管单位、海事单位、海上船舶保持视距之内的基本话音通信。在执行远距离低空复杂搜救任务,需要多方指挥协调时,这些常见手段难以满足应急通信和定位监控的需求。S-76D 机型配置Sky Connect Tracker III 系统,具有基于铱星的话音、短信、位置追踪功能,但机载终端和地面Web 软件的信息编辑发送、地图显示等功能较简单,且不支持中文,位置发送间隔在3 分钟左右,其功能和性能与搜救飞行任务需求有较大差距。
2 航空通信监视技术发展趋势
2.1 空管通信技术
在我国,甚高频地空语音通信(118MHz-137MHz、DSB-AM)是目前使用的主要地空通信手段。随着全国机场和航线上的甚高频系统的不断建设,我国东部地区6600 米以上空域基本实现了双重覆盖,西部大部分地区,包括主要航路6600 米以上空域实现单重覆盖。通过内话系统的交换和联网能力,集中利用了地空通信网络资源,改善了地空管制的通信可靠性。
数据通信在未来成为空管地空通信的主要手段,地空之间信息交互能力将有极大提升[5]:
(1)VDL 模式2 是国际民航组织推荐的航空电信网主要的数据链技术,信息传输率可达31.5kbps,相比目前使用的数据链有了大幅度的提高,是近期和中期(当前至2028 年)在大陆区域使用的主要数据链。
(2)L-DCAS 是正在研究中的未来用于终端区和大陆区域航路上的地空数据链技术。L-DACS使用L波段,可提供更高的通信速率,覆盖范围大(约400km),支持航空器高速移动(1080km/h)通信。
(3)卫星通信适用于偏远地区和洋区,数据通信也将逐步取代HF 语音通信和基于卫星的语音通信。国际民航组织希望用卫星技术作为未来偏远地区和洋区的主要通信手段,面向中远期应用,下一代卫星通信技术及相关的数据链也在研究之中。
2.2 空管监视技术
空域监视技术的发展历程可以分为4 个阶段,从最早的人工监视到被动、独立式监视(一次雷达),然后过渡到被动、协作式监视(二次雷达/应答机、Traffic Collision Avoidance System,TCAS),逐步发展到目前的主动、协同式监视(Automatic Dependent Surveillance,ADS),与此相适应,空域监视范围逐步扩大,相应的运行管制方式也在不断变化。
协同式空域监视技术的特点是:飞机主动发布自身飞行状态信息;机载设备与地面设备相互协同,在原有协作的基础上还需要进行信息处理与性能监测;空域监视的范围也扩展为航空飞行的全过程。
由于机载卫星导航设备的引入,协同式空域监视技术的核心在于机载导航信息源与地面设备的相互配合。第一,必须解决机载导航完好性监测问题,机载信息源的完好性直接决定监视性能。第二,必须解决多元可信监视问题,在星基监视与地基监视的覆盖重叠区需要进行多元融合。第三,必须解决航迹保持性能监视问题。为了保障精细化运行条件下的空域安全,需要对航迹保持的稳定性进行动态监视[6]。
2.3 基于卫星链路的直升机航空通信监视技术
为了充分发挥直升机在军事和民用陆上、海上低空快速反应和机动能力,通过与传统的视距通信监视手段互相补充,利用卫星链路的超视距能力和多业务传输手段,构建基于卫星链路的直升机地空通信和定位追踪监视网络[7]。
以传统空管通信和监视手段看,搜救直升机地空通信网与监视情报网由相对独立的无线网络构建。搜救直升机在正常航路飞行时受空管单位指挥,运行体制和通信监视方式与现行民航空管程序匹配;在执行搜救作业,特别是外远海和低空飞行时,基于卫星链路将地空任务信息和位置信息合成并超视距传输,将极大提高救助单位运控中心对搜救直升机应急通信和定位追踪能力。
3 系统架构设计
3.1 系统功能设计
为满足全空域无盲区、运行稳定、信息直观等搜救飞行支持能力要求,以卫星定位、卫星链路为信息网络,构建地面飞行监控管理平台,面向运控部门,提供所有监控和应急通信业务服务。通过在搜救直升机上加装机载卫星通信终端,结合运控中心的地面监控信息软件,实现对地、空、海一体化的搜救飞行监控及通信调度作业,系统架构如图1所示。
系统可实现对搜救直升机全天候的飞行监控及通信,同时面向用户提供可靠的信息服务。监控软件支持多种图层模式显示;支持全球范围双通道话音实时通信,支持全球范围航空器飞行位置跟踪,位置监控更新频次可调节,一分钟内可提供8 次位置刷新;通过地面智能终端App,实现随身的移动监控及通信;支持历史航迹查询和数据回放;支持机组SOS 一键告警;支持基于GIS 的运行位置区域告警;支持短信收发;支持专业图层标注等功能;系统根据需要可扩展接入外部的AIS 数据,支持AIS 目标的显示。
3.2 信息流程设计
(1)前向数据信息流程。前向数据信息流程如图2 所示:
(2)返向数据信息流程。返向数据信息流程如图3 所示:

图1 搜救直升机应急通信及定位追踪系统架构
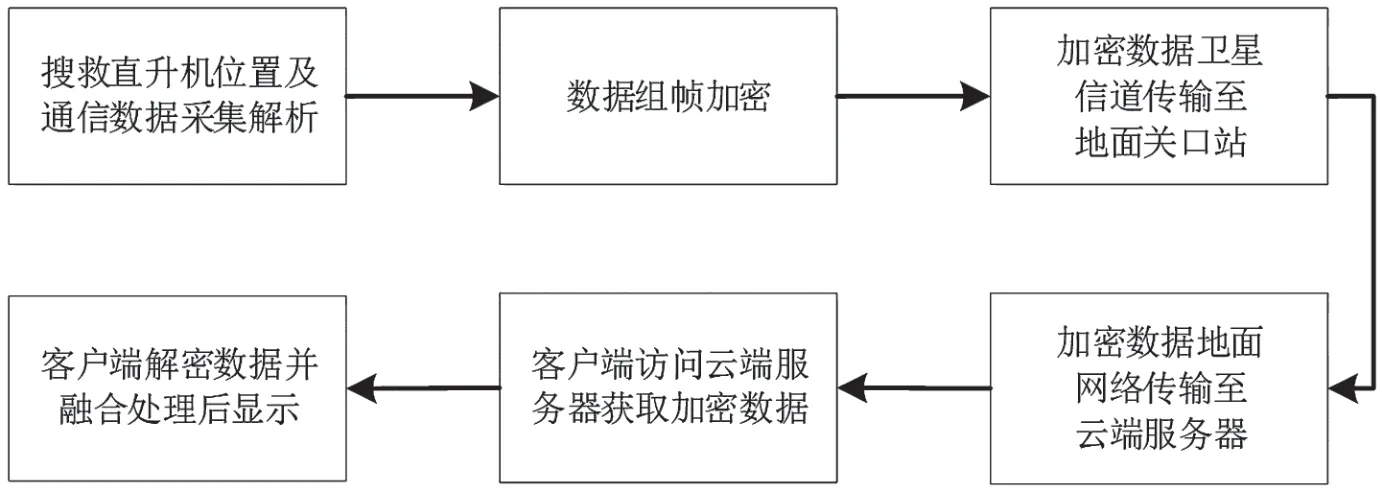
图2 前向数据信息流程
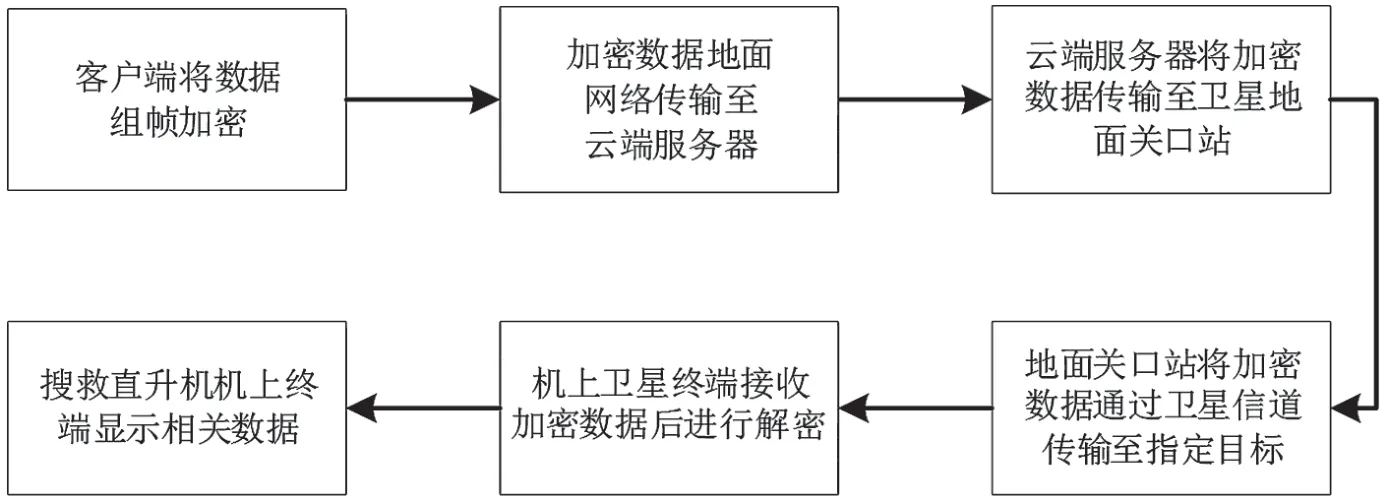
图3 返向数据信息流程
3.3 传输链路设计
目前,主流的卫星传输链路主要有INMARSAT卫星、Iridium 卫星和北斗RDSS 系统,各自的主要特点如表1 所示。

表1 主流卫星传输链路对比
通过技术体制对比分析,针对海上搜救尤其是旋翼航空器的飞行动态监控,基于铱星的卫星通信技术体制可以提供全球话音通信和SBD(Short Burst Data)报文功能,在航空搜救应用上有一定优势。
从政策上看,2013 年中国民航局制定了《航空公司运行控制卫星通信实施政策》,为彻底解决飞机与航空公司运行控制中心之间语音通信联系和实时监控问题,要求在2017 年底前实现所有运输类飞机使用卫星通信系统与运行控制中心在4 分钟内建立语音通信联系的目标,铱星系统在此政策的选用范围之内。
3.4 位置源设计
根据民航局技术发展政策并结合实际应用要求,系统加入北斗卫星位置源体制,使设备具备北斗、GPS 双模合一的位置源体制下的双星定位能力,并采用卫星通信天线与北斗/GPS 定位天线二合一天线体制,如图4 所示。
3.5 数据处理及存储设计
为实现飞行数据的可靠存储及异地便捷访问,系统采用云计算存储技术。在云平台服务器上,通过与数据认证与转发服务建立TCP 连接,用户将能直接接收铱星设备上报的实时数据,数据内容包括铱星位置数据、报警数据、短信报文。相比WebService 数据接口方式,系统采用主动推送方式,实时性更强。

图4 GPS/北斗双星定位源示意图
为了保障数据的安全性,系统采用用户账户名和密码的认证和登录机制。系统提供统一的外部数据接入口,对外部数据源有很好的扩展性,可以接入北斗示位、AIS 船舶识别等外部系统的海上目标信息,通过实时监控待救船只、救助船只、临近船只的准确位置,便捷地形成海空搜救立体态势。
3.6 双通道一体化切换设计
结合搜救直升机飞行作业实际情况,在进行较大机动动作时为保障卫星数据传输的稳定性,通过在直升机机身两侧各配置一个卫星天线及收发数据通道,使得两个卫星天线至少能有一个能够较好地指向卫星,以利于卫星数据传输。结合机载平台环境,设备的安装布线以及操作的实际情况,需要对设备进行“一体化双通道”设计,硬件架构如图5所示。
机载通信终端采用双通道一体化设计,设备内部集成2 个卫星通信信道,采用主备双机备份配置,提升设备运行的可靠性。通信终端能够根据两个通道中卫星信号质量,自适应切换选择信号较好的卫星信道完成卫星数据的收发工作,从而保障卫星数据的稳定传输。
3.7 数据加密设计
为保护直升机上通信终端与地面监控系统之间的信息安全性,确保信息传输连续性,系统采用AES 算法,密钥长度为128 位,达到商用级别保密要求。加密算法原理如图6 所示。

图5 双通道一体化硬件架构设计

图6 加密算法原理示意图
AES 算法中的密钥管理是关键,需要在收发两端保证密钥的一致性才能正常通信,加密算法AES的密钥为128bit,密钥在终端和系统端同时更新。
3.8 终端显控功能设计
地面监控软件是以卫星通信、GIS、AIS、云处理等技术相结合的先进信息系统平台,用于飞机位置监视和任务行动的指挥调度。系统采用基于地图引擎的开放式数据源,还提供海图、卫星图,及叠加显示方式,用户可以自由在这三种地图显示方式中进行切换。支持电子海图在“简单”“标准”“完全”的标记显示状态间切换,并可扩展接入AIS 船舶动态信息,终端多图叠加界面如图7 所示。

图7 多图叠加的终端显控功能界面
随着网络通信在监控领域的高速发展及广泛应用,有效地安全访问控制机制是合法地使用系统、充分发挥系统功能的一个重要前提。系统软件基于角色的访问权限控制(RBAC,Role-Base Access Control)进行设计,能够将权限控制独立开发,形成独立的功能模块;能够将权限与角色进行简单的增加与修改便能实现权限的控制,从而让权限管理简单、高效、可靠,大大减少了频繁的数据库链接,很好地实现了高效的访问控制管理[8],可为飞行队各部门分配不同权限,加强访问飞机定位监控信息和实施地空应急通信的权限管理。
4 系统应用效果
系统应用运行界面见图8。2017 年1 月起,搜救直升机应急通信及定位追踪系统陆续装备北海第一救助飞行队及其他飞行队使用,在S-76 机型和EC225 机型上使用飞行总时间总计超过3000 小时,飞行架次总计超过1200 架次,期间设备工作可靠,系统运行良好,解决了搜救直升机在海上低空飞行时缺乏实时有效监控和超视距通信的难题,有力保障了海上救助飞行任务的顺利执行,并对飞行队安全运行提供了重要支持。

图8 系统应用运行界面
