具有预警功能的四机器人安全系统数学模型构建
2021-01-25凤宝林乔兴
凤宝林 乔兴

摘 要:运用补充变量法和马尔科夫过程理论给出了可修复四机器人安全系统的数学模型.基于抽象柯西问题理论构建抽象柯西问题系统模型,运用半群理论解决此类系统解的适定性,在可修复机器人安全系统中引入预警功能.
关键词:预警功能;四机器人安全系统;数学模型
[中图分类号]C94 [文献标志码]A
Construction of Mathematical Model of Four-robot SafetySystem with Early Warning Function
FENG Baolin1,QIAO Xing2*
(1.Mudanjiang Normal University School of Mathematical Sciences,Mudanjiang 157011,China;2.Daqing Normal University Department of Mathematics,Daqing 163712,China)
Abstract:In order to ensure the safety and reliability of the system and avoid unexpected accidents,the early warning function is introduced into the repairable robot safety system,and the Markov process theory and supplementary variable method are used to construct a mathematical model of the four-robot safety system with early warning function.Constructing the abstract Cauchy problem system model based on the abstract Cauchy problem theory,to solve the well-posedness of such system solutions by the facilitates use of semigroup theory.
Key words:early warning function;four robots safety systems;mathematical model
随着现代科学技术的发展,机器人得到广泛的应用.机器人替代人类在危险环境中完成各种困难和复杂的任务,其安全系统的稳定性和可靠性就成为人们关注的热点.机器人安全可靠研究取得了很大进展,但仍有很大的改进空间.具有预警功能的机器人安全系统可以在危险发生之前预先报警,给经营管理者发出报警信号,进而可以有充分时间预判即将要发生的各种突发灾害,减少灾害给社会带来的经济损失.为保证系统的安全可靠,避免突发事故的发生,本文在可修复机器人安全系统中引入预警功能.运用马尔科夫过程理论和补充变量法构建具有预警功能的四机器人安全系统数学模型,基于抽象柯西问题理论构建抽象柯西问题系统模型,运用半群理论解决此类系统解的适定性.
1 系统模型介绍
机器人是一个包括机械、电子、电气、液压气动、计算机等多学种类型的元部件和控制软件在内的复杂系统,其可靠性、安全性研究相对来说比较复杂.为了更清楚地考虑这个问题,本文假设机器人安全系统由四个机器人、安全装置和一名修理工组成.假设整个系统不考虑修理和替换过程,在t=0时刻开始运行.在t=0时刻,所有机器人和安全装置都是新的,系统开始正常运转,修理工开始休假.如果系统出现故障时,修理工立即终止休假,进入维修故障系统状态.假设:
(1)故障是随机独立的.
(2)整个系统由四个机器人+安全装置+三个冗余热备机器人构成.
(3)四个机器人完全相同且修复如新.
(4)只有当四个机器人都失效时(或由常规原因导致的安全装置失效),整个系统处于故障状态.
(5)系统处于状态i的寿命Xi分布为:FXi(t)=1-e-λcit,t≥0,λci≥0,i=0,1,2,3,
修理时间的分布函数是Gc(t)=∫t0gc(x)dx=1-e-μct,t≥0,μc≥0.
(6)正常工作状态机器人的寿命X的分布为:Fx(t)=1-eλt,t≥0,λ≥0,
修理时间的分布函数是G1(t)=∫t0g1(x)dx=1-e-μt,t≥0,μ≥0.
(7)热储备状态机器人寿命Y1的分布为:
FY1(t)=1-e-αt,t≥0,α≥0.
(8)安全裝置修复如新,安全装置的寿命Y的分布为:
FY(t)=1-e-λst,t≥0,λs≥0,
修理时间的分布函数是
G2(t)=∫t0g2(x)dx.
(9)令Xi(i=4,5)是系统每次故障所需的维修时间,具有分布函数Gi(x)和概率密度函数gi(x)且满足:
Gi(t)=∫t0gi(x)dx=1-e-∫t0μi(x)dx,
且
E[Xi]=1μi.
(10)X,Y,Y1,Xi(i=0,1,2,3,4,5)是相互独立的.
若用N(t)表示t时刻系统所处的状态,则系统有6种状态:
状态0 一个机器人和安全装置工作,三个机器人热备状态;
狀态1 一个机器人和安全装置工作,一个机器人发生故障,两个机器人热备状态;
状态2 一个机器人和安全装置工作,两个机器人发生故障,一个机器人热备状态;
状态3 一个机器人和安全装置工作,三个机器人发生故障的状态;
状态4 四个机器人均发生故障的状态;
状态5 安全装置发生故障时系统所处的状态;
状态c 常规故障系统所处的状态.
N(t),t≥0并不是Markov过程,但可以利用补充变量的方法使之成为一高维Markov过程:
假设故障系统正处于维修状态,令Xi(t)(i=4,5)表示开始执行维修到当前为止的维修用时,令
Z(t)=N(t),N(t)=0,1,2,3cN(t),X4(t),N(t)=4N(t),X5(t),N(t)=5.
显然,Z(t),t≥0构成Markov过程.令Pi(t)(i=0,1,2,3,c)表示t时刻系统处于状态i的概率,Pi(t,x)(i=4,5)表示t时刻系统处于状态i并且故障部分已经维修了x时间的概率密度,即
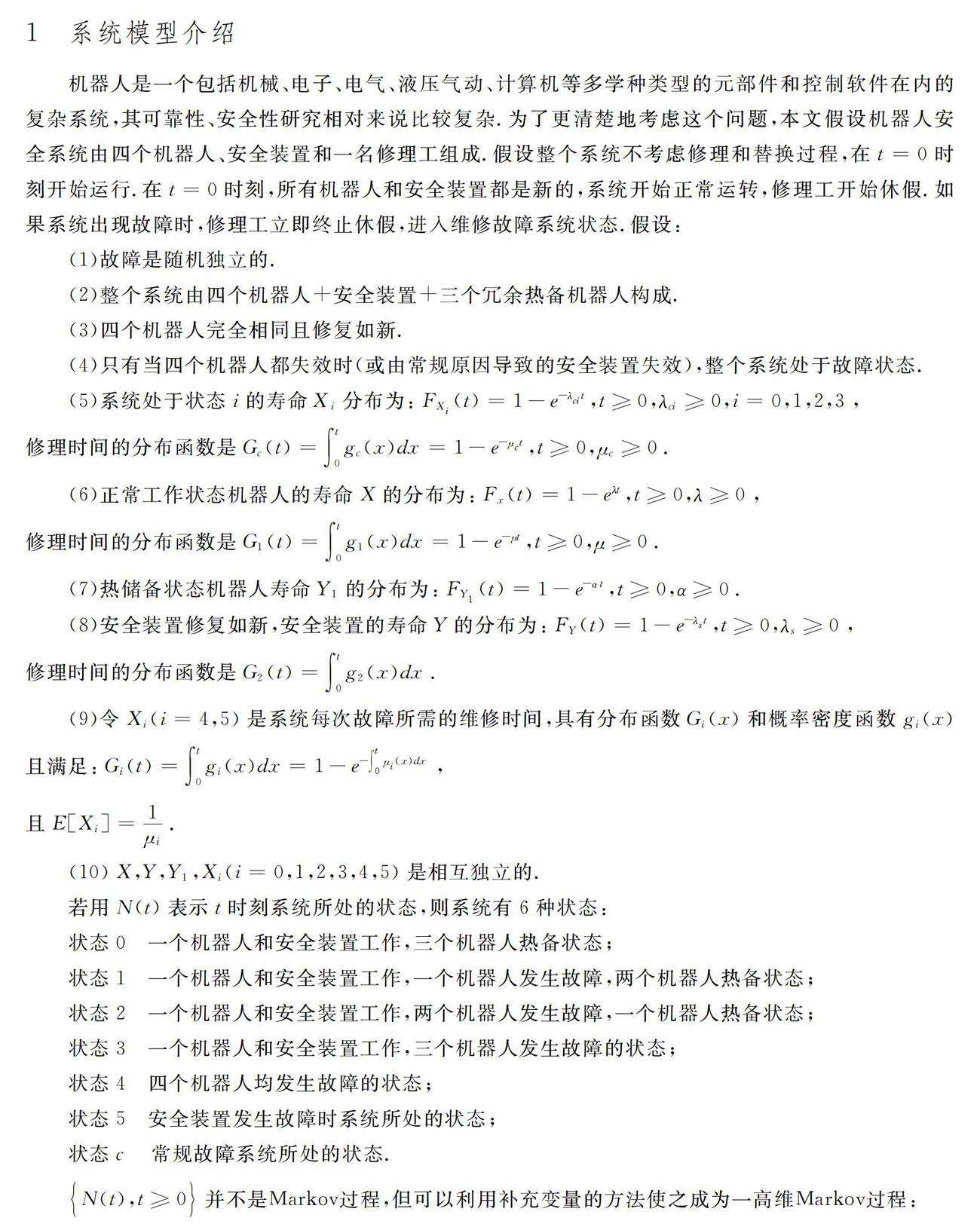
Pi(t)=PN(t)=i(i=0,1,2,3,c),Pi(t,x)dx=Px 系统的状态转移图如图1所示: 由概率分析可得与图1中所描述的模型相关联的积分微分方程组为[1-2]: 其中,λ表示运行系统机器人由本身原因引起的损坏率,λci表示在状态i系统发生常规故障率(i=0,1,2,3),λs表示运行系统发生人为故障率,α表示热备机器人的损坏率,μ表示运行机器人的常数修复率,μc表示运行系统的常数修复率,Pi(t)表示t时刻系统处于状态i的概率(i=0,1,2,3,c),Pi(t,x)表示t时刻系统处于状态i且已修时间x的概率,(x,t)∈[0,∞)×[0,∞).μi(x)表示x时刻系统处于状态i时的修复率,且满足 记作: 2 基于抽象柯西问题构建系统模型 为方便后面讨论,把系统方程(1)-(9)转化为Banach空间中的一个抽象Cauchy问题. 设X定义为: 其中,P=P0,P1,P2,P3,Pc,P4(x),P5(x).很容易证明X,·是一个Banach空间. 定义算子A,B: 是绝对连续函数且满足 因此,系统方程(1)-(9)可改写成Banach空中的抽象柯西问题[3](ACP): 3 结束语 本文运用补充变量法和马尔科夫过程理论给出了可修复四机器人安全系统的数学模型,为了今后运用半群理论讨论此类问题解的存在唯一,基于抽象柯西问题理论构建一个巴拿赫空间中的抽象柯西问题模型. 参考文献 [1]M.Jain,Rakhee,Mahavir Singh,Bilevel control of degraded machining system with warm standbys,setup and vacation[J].Applied Mathematical Modelling,2004,28:1015-1026. [2]J.C.Ke,K.H.Wang,Vacation policies for machine repair problem with two type spares[J].Applied Mathematical Modelling,2007,31:880-894. [3]黄发伦,郑权.线性算子半群及对偏微分方程的应用[M].成都:四川大学出版社,1988. 编辑:吴楠 收稿日期:2020-10-07 基金项目:牡丹江市2018年指导性科技计划项目技术攻关项目(G2018q2465);黑龙江省省属高等学校基本科研业务费科研项目(1353MSYYB017) 作者简介:凤宝林(1980-),男,吉林公主岭人.副教授,硕士,主要从事系统可靠性和算子理论研究;乔兴(1978-),男,吉林松原人.副教授,博士,主要从事系统可靠性和算子理论研究.
