智能汽车换道轨迹规划曲线研究
2021-01-25张甫城胡敏江书真
张甫城,胡敏,江书真
(长安大学汽车学院,陕西 西安 710064)
引言
在高速公路上,换道是最常见的驾驶行为之一。随着自动驾驶技术的发展,对换道轨迹规划的研究的方法也很多,其中包括人工势场法、曲线拟合方法和搜索算法等,换道车辆的轨迹规划[1]直接决定了自动驾驶汽车能够高效、安全的完成换道任务,因此对轨迹规划曲线的就显得特别具有意义。
1 人工势场法
通过人工建立势场,把障碍物设置成为斥力,把目标设置成引力,通过这种力的叠加的方法,对车辆的运动轨迹进行规划。
引力场:

斥力场:

其中ξ和η是尺度因子,ρ(q,qgoal)表示物体当前状态与目标的距离,ρ(q,qobs)表示物体与障碍物之间的距离,ρ0代表每个障碍物能产生影响的半径范围。
用人工势场法去研究轨迹规划,简单实用,同时其具有实时性。但是,在目标点距离比较远的时候,引力的作用就会非常大,物体的路径可能会碰到障碍物,同时当目标点附近存在障碍物的时候,会导致斥力非常大,这样容易影响到达最终的目标点。
2 曲线拟合法
2.1 等速偏移模型
等速偏移模型包括三个直线阶段A1A2、A2A3、A3A4,车道宽Yab,变道纵向距离为Xab,由于模型的轨迹全部由直线组成,导致在每一个拐点处形成了突变,一阶导不连续,所以等速偏移作为换道轨迹无法满足实际的变道情况。
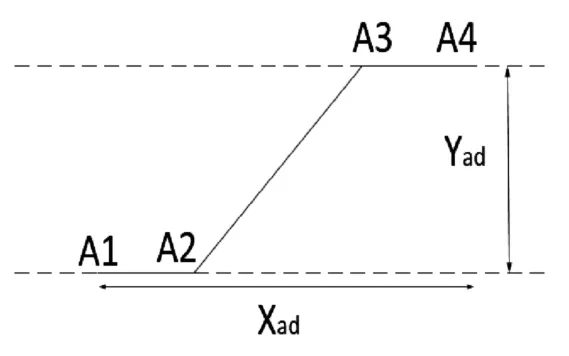
图1 等速偏移模型
2.2 圆弧变道曲线模型
圆弧轨道模型是由两端圆弧和一段直线所组成B1B2、B3B4、B2B3,车道宽Yab,变道纵向距离为Xab,直线部分二阶导为零,圆弧上每点二阶导为定值,但是在B2、B3两点处也存在曲率的突变,在实际的换道过程中轨迹曲线无法满足圆弧变道模型。
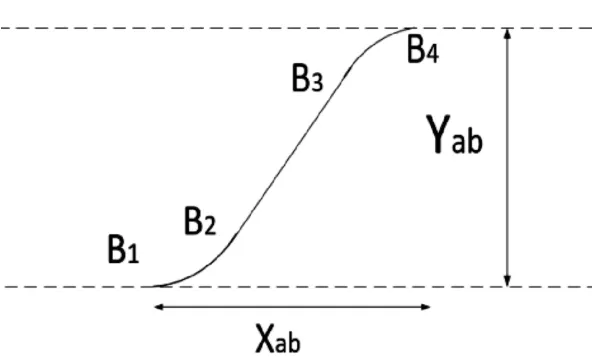
图2 圆弧变道模型
2.3 梯形加速度变道模型
坐标系纵轴是横向加速度,横向加速度的变换满足线性变换,切是关于对称的大小相等、方向正好相反的两个梯形,且加速度存在最大值,但是加速度变道模型相比较复杂,在实际车道变换的时候容易造成变换不灵活。
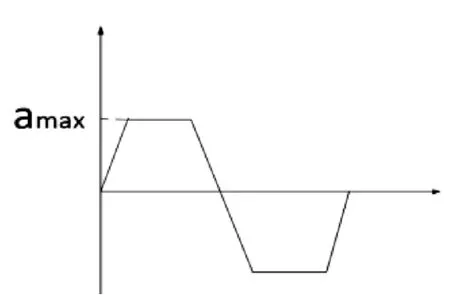
图3 梯形加速度变道模型
2.4 五次多项式曲线
五次多项式函数满足的一般表达式:

式中,y(t)是时间关于横向位移的函数关系,x(t)是时间关于纵向位移的函数关系,目前广泛应用于换道轨迹规划的就是五次多项式[2],由于其一阶导、二阶导都具有连续性,换道过程中能满足车辆对平稳性、效率性、舒适性等的要求[3],后面以五次多项式的最优轨迹的求解上也便于计算,对换道轨迹规划具有重要的作用和意义。
2.5 贝塞尔曲线

式中:Pi是表示控制点,Bi,n(t)是伯恩斯坦基函数;贝塞尔曲线简单易用,在初始点处与特征多变行相切,具有缩减性等良好的性质,且满足一阶导、二阶段连续,但是在实际的换道轨迹规划中,控制点的选取相对而言比较困难,主要用于解决整体形状的控制问题,在换道轨迹规划也有一定的应用。
曲线拟合法除了等速偏移模型、圆弧变道曲线模型、梯形加速度变道模型、五次多项式和贝塞尔曲线,还有样条曲线、等速偏移模型与正弦函数模型等,曲线拟合法与人工势场法比较起来,通过给定了起始点和终点,通过曲线拟合,能生成满足换道舒适性、安全性、效率等,还能满足动力性约束和其他约束的轨迹,在智能汽车换道轨迹规划上面具有十分重要的作用。
3 搜索算法
搜索算法在轨迹规划中,也是常用的方法之一。在搜索算法中,快速搜索随机树是应用的最广泛的,RRT 是一种多维空间中有效率的规划方法,它以一个初始点作为根节点,通过随机采样增加子节点的方式,生成一个随机扩展树,当随机树中的叶子节点包含了目标点或进入目标区域,便可以在随机树中找到一条由初始点到目标点的路径。
但是通过这种方法生成的曲线会存在曲线突变的现象,是的曲线不够平滑,在实际的换道的轨迹规划中也不易实现。
4 总结
随着自动驾驶技术的不断发展,换道轨迹规划已经具有越来越成熟的方法,目前人们在换道轨迹规划上面,应用最广泛的是拟合曲线法中的五次多项式曲线去拟合换道轨迹,既能生成具有舒适性、效率、安全等优点的曲线,也能满足实际中车辆的动力学约束和其他约束的要求,在换道轨迹规划中具有十分重要的作用。
