基于PCL的自动化机器人视觉形状特征识别算法分析
2021-01-24张旭泽
姜 燕,王 悦,张旭泽,李 露
(北京中电飞华通信有限公司,北京 100070)
0 引言
近年来随着科学技术的不断发展,自动化机器人视觉技术在国内外的发展速度逐渐加快,并且涉及多个领域,得到了广泛应用[1,2]。自动化机器人视觉识别技术是向机器人输入一种模拟人体视觉器官功能的技术,完成对事物的识别操作,主要代替人工完成事物的检查和识别工作[3]。传统的自动化机器视觉识别技术只能保证对简单物体的识别准确率,对于一些复杂事物的视觉识别结果会出现较大误差,给各个领域带来一定的损失[4,5]。
因此本文提出基于PCL的自动化机器人视觉形状特征识别算法的研究分析,以提高机器人视觉识别能力为目的,展开一系列的分析。PLC指的是一种可编程的控制器,本文结合PLC可编程和可控制的特点以及二维三维图像处理方法,构建一个简单的自动机器人视觉形状特征识别算法。
1 基于PCL的自动化机器人视觉形状特征识别的阈值图像处理
本文设计的基于PCL的自动化机器人视觉形状特征识别的图像处理分为云数据采集、数据预处理、提取特征点、对图像进行分割处理四个步骤,每个步骤之间紧密相连,构成一个完整的自动化机器人视觉形状特征识别的图像处理流程[6,7]。阈值图像处理工作流程如图1所示。

图1 阈值图像处理工作流程
根据图1可知,首先对自动机器人对视觉图像完成初步的云数据采集工作,因为每个事物的图像都可以对其进行三维建模处理,处理后的事物信息更具有深度,为视觉形状特征识别的特征提取提供信息量高的数据,有利于提高机器人的视觉识别精度[8,9]。对事物图像的数据采集主要采集事物本身的信息数据和周围环境的信息数据,然后将采集到的数据进行数据预处理操作。数据预处理操作的目的是筛选出具有意义的机器人视觉识别的图像信息,减轻图像特征识别的工作量,提高机器人视觉识别的效率。对初步采集到的图像进行阙值分割,目的是将图像与相靠背景相分离,降低其他因素对机器人视觉识别的干扰,为了分割精度,将有效的图像以黑色框边,其他无效图像以白色背景虚化。最后机器人根据识别区域图像的不同灰度值进行图像形状的有效识别[10]。此外为保证像素点均匀性,本文将阈值的像素点设置为0。
阈值采集过程如图2所示。
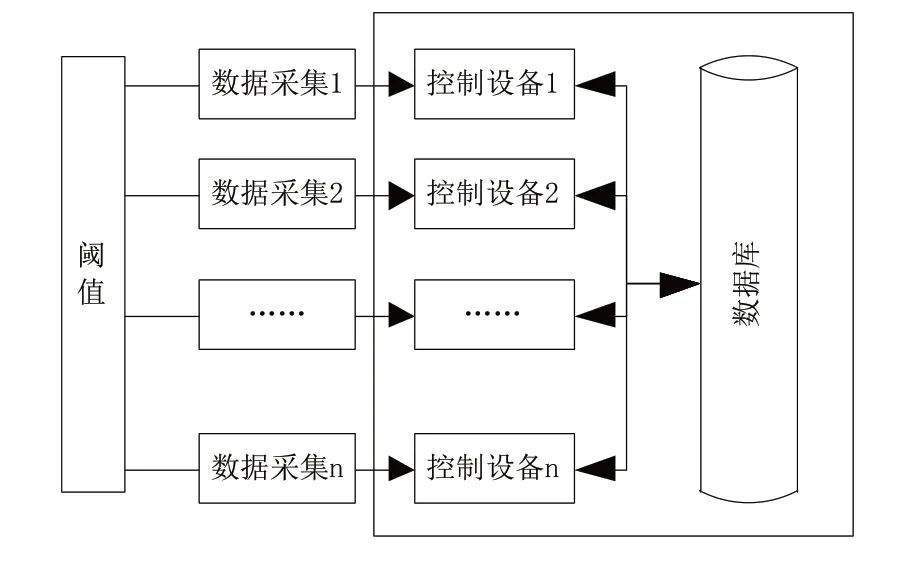
图2 阈值采集过程
本文采用滤波处理法剔除无效的数据信息,主要是降低灰度图像中的噪点,提高机器人的识别率。处理过程是将采集到有效区域的灰度信息图像平均分为多个大小相同的区域,然后利用标准的图像像素点作为每个区域的平均像素点,不改变区域大小的情况下,合理剔减、增加每个区域内的像素点,使整个图像信息噪点度降到最低。
本文选用云聚类分析的方法提取自动化机器人视觉图像的体征点,云聚类提取方法的提取原理是对图像的每一个信息点进行识别,根据结果需要和标准,提取出相对于的视觉图像特征点,极大地保证了图像特征点的精度和准确度。特征提取的过程分为云聚类关键特征分类和提取两个部分,云聚类关键特征分类首先将有效图像信息数据的图像灰度信息机械能深度量化,根据图像的像素数量为基础进行量化计算,将取量化值为500~2500之间的有效图像区域作为最终的特征点识别提取区域。在筛选好有效的视觉形状特征图像识别区域,通过PCL技术概述出视觉图像的整体特征,根据自动机器人的需要进行调用备份[11,12]。
2 基于PCL的自动化机器人视觉形状特征识别算法
自动化机器人如图3所示。

图3 自动化机器人
视觉形状识别过程如图4所示。

图4 基于PCL的自动化机器人视觉形状特征识别
2.1 基于PCL的自动化机器人视觉形状特征的轮廓形状识别
基于PCL的自动化机器人视觉形状特征的轮廓分析主要利用机器人视觉观察事物形状的边界轮廓边界像素点的分析识别,完成视觉形状特征的轮廓分析。识别过程数据接口如图5所示。
1)轮廓的长度。轮廓的长度是一种简单的视觉形状特征,它是指视觉形状特征区域最外围的轮廓周长。视觉形状的特征区域可以看做是由无数个区域内部点和外围轮廓点构成的。外围轮廓点以8连通链码的排列方式从8个方向连接组成视觉形状特征区域轮廓,其轮廓的长度通常用外围轮廓点的数量衡量。轮廓长度的计算方式如式(1)所示。

图5 识别过程数据接口

在式(1)中,S表示轮廓的长度;M表示轮廓上拥有的外围轮廓点数量;c表示每个外围轮廓点的标准长度。
2)轮廓的直径。轮廓的直径是指在视觉形状特征区域内相离最远的外围轮廓点之间的距离,在某种程度上,轮廓的直径可以描述视觉形状特征区域的大小和形状。假设在某一视觉形状特征区域中,相距最远的两个外围轮廓点为A点和B点,则该视觉形状特征区域的轮廓直径可以用下式(2)表示。

其中,D表示轮廓的直径。FA、FB都属于轮廓内的点,H表示距离量度,在不同种类的特征分析中,距离量度的值不一定相同。
3)离心率。设在视觉形状特征区域,水平经过视觉形状特征区域中心点的直线段为长轴,垂直经过区域中心点的直线段为短轴,则离心率代表长轴与短轴的笔直。离心率可以大致描绘视觉形状特征区域的轮廓,使得任何具有封闭轮廓的视觉形状特征区域都可以用椭圆来模拟,改变了传统视觉形状特征区域描述的规范化,使其描述形式更加灵活[13,14]。
4)轮廓的斜率、曲率和角点。斜率、曲率和角点是描绘视觉形状特征区域轮廓的三大要素。其中,轮廓的斜率表示了轮廓上各点的变化速度,明确了各点的指向。曲率表示轮廓上各点沿着轮廓方向变化的情况,展示了轮廓的凹凸性变化,但是由于曲率会因为轮廓的不平滑而不可靠,因此在使用曲率前必须对视觉形状特征区域进行预处理,才能得到准确的变化情况。角点是在一定范围内曲率的极值点,通过角点可以基本分析轮廓的变化的复杂性,明确轮廓变化的幅度[15]。识别界面如图6所示。
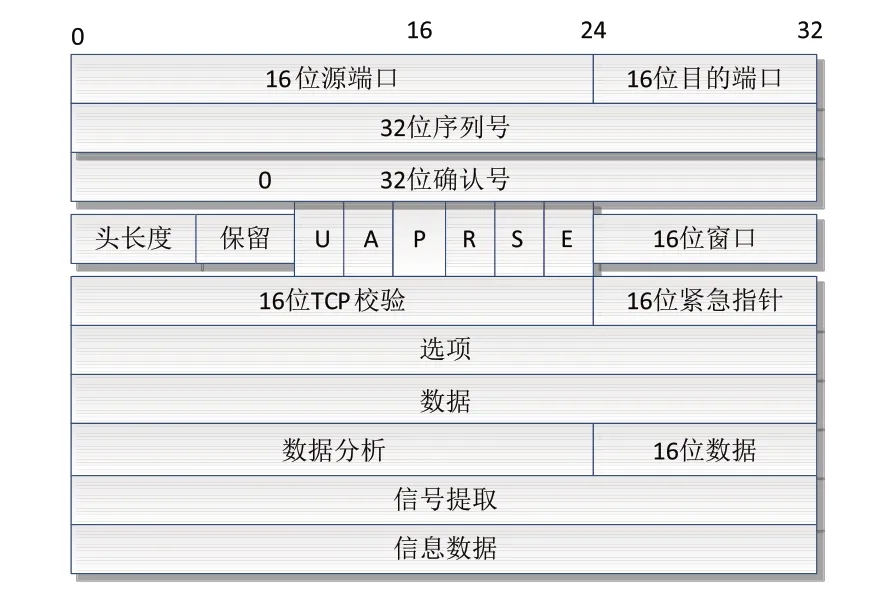
图6 识别界面
2.2 基于PCL的自动化机器人视觉形状特征的区域形状识别算法分析
通过上述对基于PCL的自动化机器人视觉形状特征的轮廓分析后,以PCL技术为基础,对视觉形状特征的区域形状进行识别,将由闭合轮廓曲线形成的视觉形状特征区域当成一个识别整体,整合该区域内的所有像素点。识别设备如图7所示。别的区域形状分为四种,如图8所示。
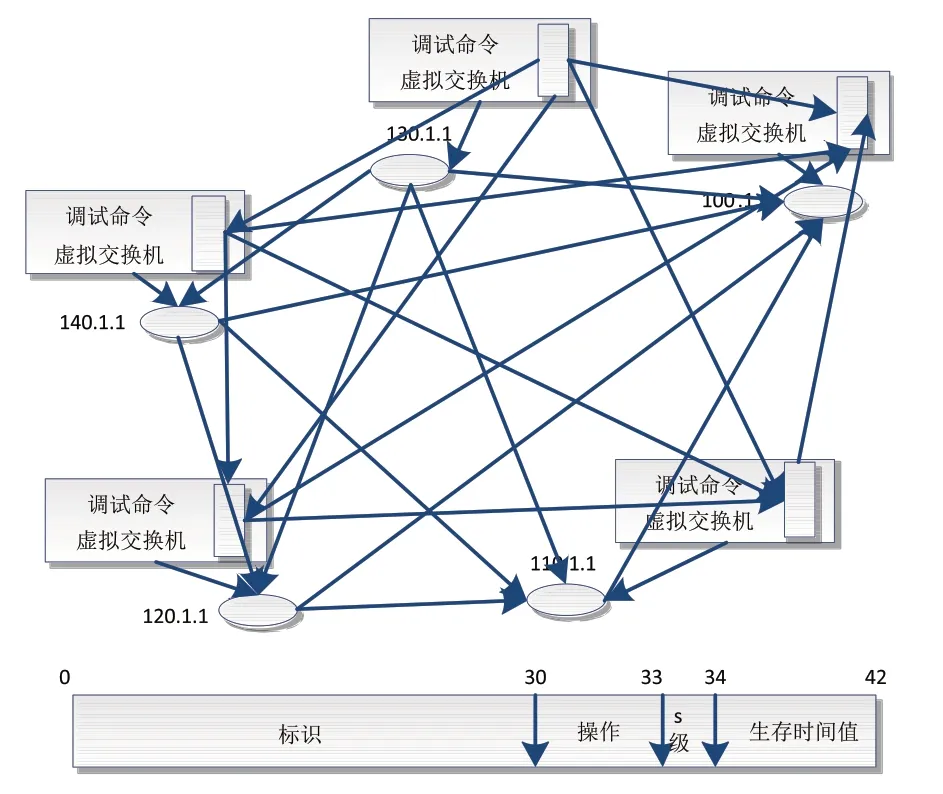
图7 识别设备
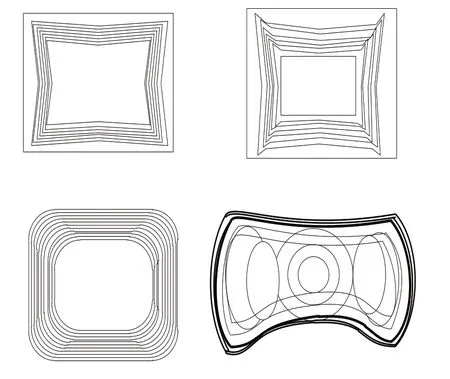
图8 识别的区域形状
1)区域重心。区域重心是一种特殊的视觉形状特征,当与区域中心不完全相同,在规则区域中,区域中心可以与区域中心为同一个点,但在不规则的视觉形状特征区域中,区域重心能够更好地描述区域的全局性。区域重心的坐标计算方式较为复杂,原因在于视觉形状特征区域内的点的数量较多,且计算结果可能不是整数,其坐标的确定具有一定难度。区域重心的坐标计算公式如式(3)所示。

其中,x表示区域重心的横坐标;y表示区域重心的纵坐标;e为计算参数;
2)区域面积。区域面积是视觉形状的一个基本特征,不仅表示了特征区域的大小,更代表了该区域包含像素点的数量。对于某一特征区域来说,其区域面积可以用式(4)来计算。

在式(4)中,(a,b)表示特征区域内像素点的坐标。采用该算法可以使区域面积的计算简单化,加快自动化机器人识别和计算的速度。
3)形状参数。形状参数主要根据视觉形状特征的周长和面积进行计算,可以更全面且紧凑地识别区域特征,但其缺点在于对于变化较小的区域不敏感。
3 实验研究
为了验证本文提出的基于PCL的自动化机器人视觉形状特征识别算法的有效性,选用本文的识别算法与传统识别算法进行实验对比。传统的识别算法分别为基于信息分析的自动化机器人视觉形状特征识别算法、基于数据挖掘的自动化机器人视觉形状特征识别算法。设定实验参数如表1所示。
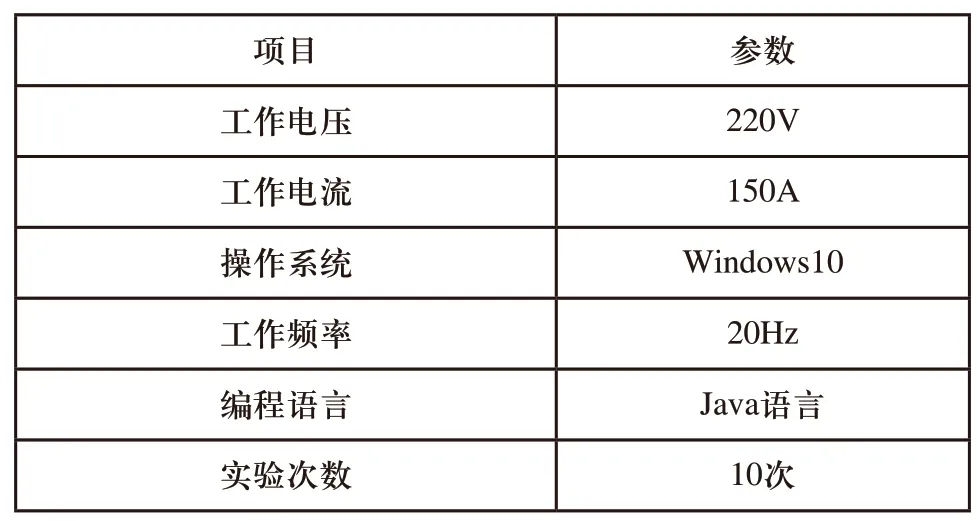
表1 实验参数
根据上述实验参数,选用本文系统和传统系统进行识别,得到的识别时间实验结果如图9所示。

图9 识别时间实验结果
根据图9可知,本文提出的基于PCL的自动化机器人视觉形状特征识别算法识别时间小于传统系统的识别时间。
识别准确率实验结果:
根据图10可知,在相同时间内,本文提出的系统识别准确率高于传统系统。本文体现出的系统具有信息分析能力,能够从多个角度探究机器人的轮廓和特点,一般情况下,在可编程控制器投入使用后,可编程控制器的工作过程分为三个阶段:输入采样、用户程序执行和输出刷新。实现以上三个阶段称为“扫描周期”。可编程控制器的CPU在整个运行过程中,以一定的扫描速度重复执行以上三个步骤,因此识别准确度更高。

图10 识别准确率实验结果
综上所述,本文提出的基于PCL的自动化机器人视觉形状特征识别算法识别能力要优于传统算法的识别能力,实际应用效果更好。
4 结语
本文深入研究了基于PCL的自动化机器人视觉形状特征识别算法,首先了解PCL的概念和基本工作方法,然后逐步分析基于PCL的自动化机器人视觉形状特征识别的图像处理过程、轮廓分析过程以及区域形状分析的过程,完成基于PCL的自动化机器人视觉形状特征识别算法分析的研究。本文在基于PCL的自动化机器人视觉形状特征识别的图像处理分析中设计的阙值图像特征提取方法,可以排除其他外界图像因素的干扰,具有操作简单、灵敏度高的优点,有效的提高自动化机器人视觉形状特征识别算法的计算准确度,且通过对视觉形状特征区域的轮廓分析和区域识别,可以更加快速地提取视觉形状特征区域的特征点,且使其识别效率和准确率更高,同时也促进了PCL技术和自动化机器人的进一步发展和应用。
