马蹄足智能矫正装置的开发
2021-01-21吴为臻施丛国
吴为臻 乔 勋 施丛国
(西京学院,陕西 西安710123)
1 设计背景
目前先天性马蹄内翻足是属于幼儿里面比较常见的四肢畸形之一,但是其发病率并不是很高。畸形的症状主要有如前足内收敛以及踝关节畸变,以及跟骨内翻等等。智能矫正的最终目的还是使其能够恢复正常状态,消除畸形,从而达到和正常人一样。本设计秉着针对传统马蹄足矫正装置需要手动调节以及不利于行走两大缺陷进行结构功能上的改进,从而研制出一款集智能化,数字化于一体基于互联网远程控制的智能矫形器。
2 整体设计
2.1 基本原理设计
该项目主要源于对传统马蹄足治疗的一种改进方案,如下图1所示,融入了目前主流技术- 自动化远程控制和超新网络通信信息技术,从而改进设计出一款新型智能自动远程控制的矫形器。

图1
主要的功能模块有:矫形器本体、通讯控制模块、医患手机APP。系统原理如下图2 所示:

图2 系统原理框图
2.2 机构设计
本设计有以下几个基本结构:a.蜗轮蜗杆机构;b.丝杆螺母机构;c.智能蓝牙控制终端;d.矫形器本体等。智能蓝牙控制这是利用现在应用广泛的数控技术,从而精准调节各参数。该装置的工作流程为: 矫形器本体接收到来自通讯模块的信号,然后推动电机工作,进而推动蜗轮蜗杆传动,传力至丝杆螺母,推动调节螺母转动。同时,矫形器本体拥有多个压力以及信号传感器,它能够将矫形过程的一些信号进行反馈,从而能够让医生清楚的了解治疗效果,做进一步治疗。矫形架支撑系统主要由外固定架以及整个动力箱组成(动力箱结构如下图所示)而执行工作部分由装置外的调节螺母,以及给调节螺母提供动力的装置组成。机械传动系统的主要部分还是蜗轮蜗杆以及丝杆螺母副等。电机带动蜗杆传递驱动力,带动丝杆螺母副运转,传递动力至装置外壳的调节螺母上,使其转动,带动矫正,完成矫形作用。

图3 动力箱结构示意图
2.3 主控制系统的安装
2.3.1 将安装调试好的单片机、蓝牙模块与步进电机驱动器控制面板接线端分别与PUL+、PUL- 和DIR+、DIR- 正确连接;
2.3.2 安装好电源并与电机驱动器控制面板的电源接线端U+和GND 相连,形成通路;
2.3.3 将电机与其驱动器的控制面板接线端A+、A-、B+、B-正确连接。

图4 控制原理图
3 零件的型号选择和校核计算
3.1 电机的确定
根据马蹄足装置对其运动过程中的动力要求,从而决定选用两相异步电机作为该装置的驱动电机。初步对电机参数进行确定和计算。根据查找得知,两相异步电机的速度范围一般处于600-1200,而交流伺服电机速度范围则位于3000-5000,处于较大速度范围,所以,结合本设计考虑,选用最大速度为1000 的步进电机作为主驱动电机。进电机的力矩分为动态力矩和静态力矩,动态力矩难确定,所以先确定静态力矩。静态力矩又是根据电机工作中所承受的负载来确定,步进电机负载通常分为摩擦和惯性两种负载。如果是直接启动我们应将两种都考虑进去,但如果只加速启动则需要考虑的是两者当中的惯性负载,当知道负载大小,静态力矩也就能确定,确定了静态力矩的大小就能确定电机的其他尺寸。电机的静态力矩初步选为0.6Nm。根据

3.2 蜗轮蜗杆机构设计
查阅GB/T 10085-1988,确定选用渐开线蜗杆。蜗轮采用锡青铜材料,蜗杆采用45 钢,并对蜗杆进行表面淬火处理,使其齿面硬度大于45HRC,蜗轮轮心用铸铁材料来增大其刚度,同时蜗轮蜗杆采用齿圈配合式结构。依照蜗轮蜗杆机械零件的设计准则,按照齿面接触疲劳强度进行计算,再按齿根弯曲疲劳强度进行校核。公式如下所示
3.2.1 先求出蜗杆上面的转矩T2。

3.2.2 再算出工作载荷系数K。

3.2.3 然后可以得到蜗轮的齿数Z2。

3.2.4 最后确定蜗轮的许用应力。查阅《机械设计》251 页表11-7 得
整理计算可得蜗轮材料的许用应力


再根据蜗轮蜗杆的齿根弯曲疲劳强度校核
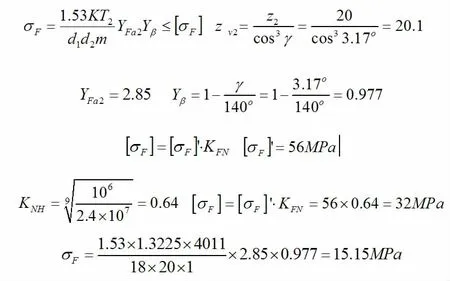
根据上述计算结果可知蜗轮蜗杆的齿根弯曲强度满足要求。
3.3 校核丝杠螺母副

4 结论
此次设计的马蹄足智能矫正装置,结构简单,布局合理,在传统矫形器基础上改良而来的,利用带有螺纹孔的蜗轮蜗杆来代替传统矫形器的手动调节螺母,通过调节步进电机驱动蜗轮蜗杆传动,从而达到矫形功能。但该技术研究还没有完全成熟,还需要在不断改进过程中探索与完善。