翻箱机增加冷凝水排放检查口
2021-01-17兰志勇
兰志勇
一、现状调查
翻箱机是行走的四轴机器人,除了通过滑触线导电轨提供动力电源,无线模块实现通信外,并无其他管路连接,为了实现机器人抱箱、取箱盖、读RFID等动作,系统设计并在机器人上安装空压气自制设备。由于翻箱机工作周围环境粉尘较大,并且在南方天气较为潮湿,常常导致空压气带水,导致气动阀、气缸、阀岛等进水,损坏设备。
二、原因分析
空压气的自制过程是空压机吸入环境空气,进行压缩、冷却,将高压气水混合物排入储气罐,经储气罐底部排水后,高压的空压气从储罐中上部引出干净、干燥的空压气供机器人使用。由于生产环境粉尘大、湿度大,导致吸入空压机的空气中含有大量的粉尘和水分混合物,所以储气罐的底部较脏,自动排水阀经常失灵(自动排水阀是靠浮球工作的,水位高时浮球抬起,阀开;水位低时浮球下落,阀关;当管路中是污物和尘土时,排水阀不能动作)。
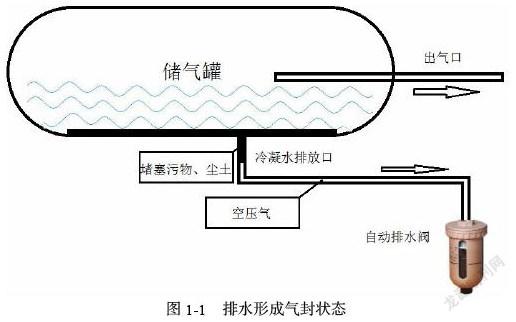
除了排水阀脏了不能排水外,还有一种情况是,自动排水阀是好的,但也排不了水。通过观察发现翻箱机是间歇工作的,常常本次工作结束后储罐水已排空,但储罐底部留有污物和粉尘,当下一次再开机冷凝水来时,和前一次残留的污物和成泥巴,导致储气罐底部的冷凝水排放管(细而长1米,管径10毫米)堵塞。虽然空压气有压力但在储气罐和排水阀之间形成气封,即储气罐上部是空压气,底部是水,自动排水阀里是空气,无法排水,如下图1-1。
当冷凝水无法及时排放时,储气罐里的冷凝水达到出气口时,水就会进入阀岛,导致气阀动作失灵,气缸动作卡滞,甚至损坏阀岛。
三、整改实施
针对发现的问题,虽然更换新的自动排水阀和清理储气罐的污物后能继续使用,但什么时候再堵塞不排水无从知道,往往发现时为时已晚,给翻箱机的正常工作带来极大的风险,为此,我们决定做如图1-2的改动,就是在自动排水阀上端增加一个手动排水阀,有两个好处,其一,定期打开排水,检查储气罐里是否积水;其二,在打开排水时,当储气罐里有压力时,可以对储气罐底部的污物进行排放清洗,使自动排水阀工作更可靠。
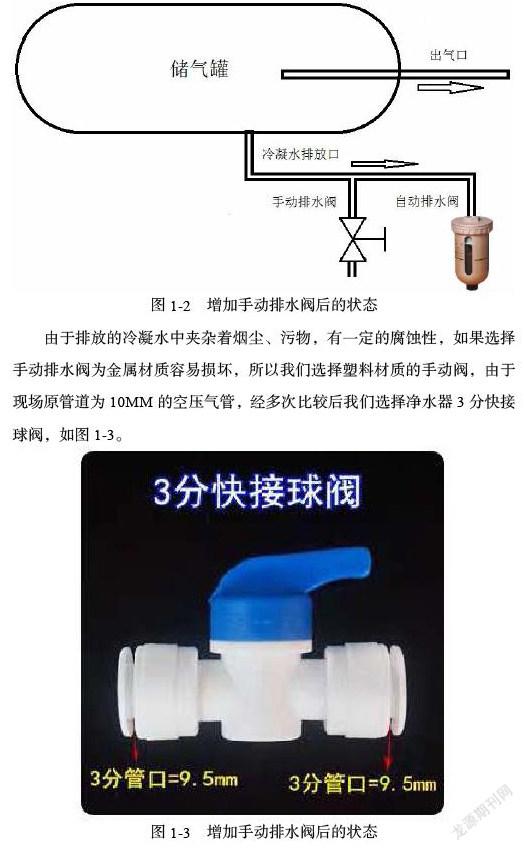
由于排放的冷凝水中夹杂着烟尘、污物,有一定的腐蚀性,如果选择手动排水阀为金属材質容易损坏,所以我们选择塑料材质的手动阀,由于现场原管道为10MM的空压气管,经多次比较后我们选择净水器3分快接球阀,如图1-3。
四、效果验证
经过以上的改动,半年来,我们每星期对翻箱机储气罐进行手动排气,每次都能排出一些积水和污物,由于将该动作列为定期的维修保养工作,所以翻箱机的工作更有保障。