非圆形AMV在变向路段的车体可活动范围研究
2021-01-14全思博王荣辉
全思博 王荣辉


摘 要:通常移动机器人的路径规划是在地图平面上,将机器人简化为质点或圆形,再对障碍物的轮廓进行膨胀得出的,非圆运动体沿着这样的规划路径运行,很可能会在变向区段受到干扰,或者规划中被判定为无路可走,而实际上可在一定条件下通行。考虑AMV形状、大小几何约束和道路条件,经建模计算出AMV以斜向平移、定点自转和沿曲线转弯等方式通过变向段的约束参数;模拟AMV连续运动通过变向段,得到其可通过的车体中心可活动范围,在此范围内的路径既安全又不过于保守。
关键词:AMV;非圆车体;规划路径;变向;可活动范围
中图分类号:TP18;TP242 文献标识码:A 文章编号:2096-4706(2021)12-0014-04
Abstract: Generally, the path planning of mobile robot is obtained by simplifying the robot into a mass point or a circle on the map plane, and then expanding the outline of the obstacles. If the non-circular moving body runs along such a planned path, it is likely to be disturbed in the direction change section, or it is determined that there is no way to go in the planning, but it can actually pass through under a certain condition. Considering the shape, size and geometric constraints of the AMV and road conditions, the constraint parameters of AMV passing through the direction change section by oblique translation, fixed-point rotation, and turning along the curve are calculated through modeling; simulate the continuous movement of AMV passing through the direction change section to obtain the movable range of the vehicle body center that it can pass through, and the path within this range is safe and not too conservative.
Keywords: AMV; non-circular vehicle body; planned path; direction change; movable range
0 引 言
在地圖上搜索连通域并规划路径是移动机器人实现智能自主运行的核心问题,已出现了许多研究方法[1,2]。如Dijkstra算法[3],通过从起点向外逐层搜索,直到到达目标点为止,在地图中找到单源最短路径。A*算法[4]在此基础上引入了评价函数,结合了最佳优先搜索和Dijkstra算法的优点,是最具代表性和应用最广的启发式算法。但是由于A*算法生成的路径拐点较多而不够平滑,故可能满足不了移动机器人运动约束条件而需要再经轨迹平滑和优化,机器人运行中还要有局部路径规划以实现运动控制和避障。例如Zhong等[5]提出了一种将A*算法与自适应窗口方法相结合的混合路径规划方法,对移动机器人进行全局路径规划、实时跟踪和障碍物规避;又如Elastic Bands算法[6],在规划机器人全局路径时,用机器人内切圆半径膨胀障碍;机器人运动到某点规划局部路径时,当检测到其运动到前方路径点时有与最近障碍物碰撞的危险,则及时进行位姿调整而避障。贝塞尔曲线等数学方法也被尝试用于平滑机器人轨迹[7,8],但是对于全局路径规划而言,因非结构化环境大而乱、路径长而复杂,因而存在规划计算的时效性问题和对动态路径平滑处理的适应性问题。
现有路径规划方法很少考虑车体几何因素对转弯变向路段的可通行性影响。其方法通常是在2-D地图平面将车体简化为质点或圆形[9,10],取其半径对障碍物轮廓做简单膨胀,原通道膨胀后有任何空白即意味可通行。这样的处理只适应圆形车体,而产线、仓库中最常用的非圆形车体在这样规划出来的路径中,特别是变向段,很可能发生碰撞干涉而不可通行。
本文考虑自主移动小车(AMV)形状、大小的几何约束以及道路条件,通过建模计算出AMV(Autonomous mobile vehicle, AMV)以斜向平移、定点自转和沿曲线转弯等方式通过不安全变向段的约束参数;模拟AMV极限条件连续运动通过变向段,得到其可通过的活动范围。
1 非圆车体的可通行性
在制造生产线和物流仓库中常用的AMV车体为长方形。图1为长方车体平面位姿和形状尺寸示意。
应用场景全局通道不同路段的交接可能是弧段、角度拐弯变向。考虑通道和车体几何约束,导航地图上通道的可通行性分为三种情况:(1)通道宽度大于车体对角线长度(车体外接圆直径L0),AMV可以任意姿态通行;(2)通道宽度小于车体窄边(车体内接圆直径Li,AMV以任何姿态都不能通行;(3)通道宽度介于L0与Li之间,AMV以某些姿态可以通行。
现有的路径规划方法通常假设车体为各向对称的圆形,取其半径作为向通道内的膨胀量,均匀地缩窄通道而不计车体结构和形状以及通道变向条件,所规划出来的路径很可能不切实际,尤其在变向路段。如图2(a)所示的rviz可视化地图,左下的小矩形框表示长方车体,障碍物之间的空白区宽度介于L0与Li之间。图2(b)和图2(c)分别是以该车体的内接圆半径、外接圆半径膨胀地图障碍的效果。图2(b)中空白连通通道表示条条路径可通行,然而实际上车体在拐弯处可能发生干涉;图2(c)膨胀地图障碍后大部分区域已无空白通道,表明车体已无路可走,而实际上障碍物间距介于车体内接圆与外接圆之间,车体是可以某种姿态通过的。
因此,有必要考虑车体和通道几何进行可通行性的研究。本文要解决的问题是当道路宽度介于车体内、外接圆直径之间,不会被简单判为可通行或不可通行,明确在变向转弯路段,可通过的车体约束参数、AMV以怎样位姿才可通行以及有多大活动范围。
2 AMV在变向路段的建模计算
设图1所示的长为Lc、宽为Wc的AMV运行于宽度为W的通道,Li≤W≤L0。AMV在直线路段畅通;在变向段,分析随通道转角θ变化的通行情况。如图3所示,通道左侧前/后沿分别为L1、L2,拐点为I;通道右侧前/后沿分别为L3、L4,拐点为J。
常用的AMV有麦克纳姆全向四轮结构和差速两轮结构,前者可以横/斜移、定点自转和沿曲线转弯方式实现变向,后者不能横/斜移。
当以斜移方式、定点自转方式变向,经建模计算(省略推导过程)所需最小通道宽度分别为:
式(1)和(2)给出了通道宽度W与转角θ和车体长度Lc、宽度Wc之间的制约关系。由已知的W可确定允许的通道最大转角θmax,或者已知通道θ角时则可确定所需的通道最小宽度Wmin。
当AMV以曲线转弯方式变向,曲线转弯路径的曲率和中心可以是變化的。对应于确定的车体形状尺寸,不同的通道几何会影响路径曲线的起始、终点。理论上AMV极限转向曲率可趋于无穷大,即转弯半径趋于0,也就是转弯曲率中心无限趋近车体中心(车体趋近自转),故与路宽W以及转角θ的关系如式(2)所示。然而显然沿较小曲率路径转弯更有利于AMV快速和平稳通过。如果不限路径曲率和中心,车体每步运行姿态都变化;若沿定曲率和中心的曲线运行,譬如路径转弯半径Rmin=Wc/2,求得所需要的最小通道宽度为:
3 AMV在变向路段的可通过范围
用Matlab编程仿真,采用与栅格地图相同的分辨率,以AMV紧贴通道两侧遍历转弯变向路段,搜索出AMV无碰撞通过变向路段的可活动范围(即车体中心可变化范围)。
3.1 AMV以斜移方式通过
设AMV在变向前的通道纵向直行,车体中心定位于通道中心线上。当车体前缘与通道右边沿如图3所示的拐点J平齐,使车体左移至左边与通道左沿紧贴;然后车体左上角贴着通道左沿斜向平移,直至车体后缘超过通道右沿拐点J方停止(即车体完全转向完毕),如图4(a)、(b)所示。在此过程中判断车体右下角是否与通道右沿干涉,有则停止移动。车体完全进入第二段通道后向右平移,直至车体右下角触及通道右沿方停止;再将车体右下角贴着通道右沿斜移退回前段通道,然后左移回到通道中心线上起始点。
搜索中车体姿态始终不变。如此遍历一个闭环搜索得到通过此变向通道过程中的车体中心可活动范围,如图4(c)和(d)中的区域G所示。AMV运行中无论是否在通道上居中,只要车体中心落在区域G内,就不会发生碰撞,可通过变向路段。
3.2 AMV以定点自转方式通过
搜索以自转变向的车体中心变化范围的过程也是顺时针循环一圈(从变向前通道中心—通道左沿—前寻到车体完全通过变向段—通道右沿—后寻到完全退回变向前通道—回到起点)。与斜移方式不同的是,AMV车体姿态在变化,自转之后车体朝向与通道方向一致,故自转角度与通道转角一致。图5(a)、(b)是沿通道左沿搜索的截图,图5(c)、(d)是闭环搜索得到的G区。通道宽度和转角在式(2)限定的范围内,只要AMV几何中心落在G区内,车体就可向右自转而不会发生碰撞。
3.3 AMV沿曲线转弯方式通过
如图6(a)、(b)所示,通过遍历变向路段的极限搜索,也可得出AMV沿曲线转弯的可活动区域,如图6(c)、(d)所示。与上述斜移和自转方式不同,此过程中车体并非在某点一次性转过θ角,而是不定曲率中心、半径和转角,小车需步步寻优运行。这样得到的G区最大,但可能影响运行速度。若沿定曲率中心和半径的曲线运行,譬如转弯半径Rmin=Wc/2,寻径判断简单,但会显著减小AMV可活动区域,如图6(e)、(f)所示。
4 不同方法所得的车体活动范围比较
以车体Lc=56 cm,Wc=Li=40 cm,L0=68.8 cm的实体小型AMV为例,比较三种方式变向转弯所需最小通道宽度。由式(1)、(2)、(3)计算得到的数据如表1所示。
由表1可见,AMV斜移方式变向所需通道宽度最大,曲线转弯方式变向所需通道宽度最小;最容易发生碰撞的地方,与车体长与宽的几何相关,在转角为arctan(Lc/Wc)或90°-arctan(Wc/Lc)之处。
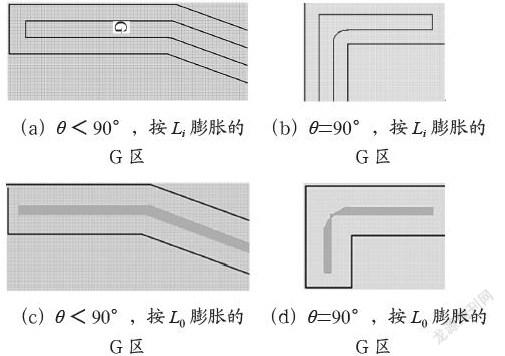
将视AMV为圆形而膨胀地图通道内侧的传统方法所得的车体活动范围作为比较,如图7所示。图7(a)、(b)和(c)、(d)分别以车体内接圆Li、外接圆L0为膨胀量。显然以内接圆Li为膨胀量所得的G区最大,然而从上节分析可知,非圆车体实际上没有这么大的可活动范围,也就是按此G区规划路径,很可能AMV运行中将发生碰撞。而按外接圆L0为膨胀量,变向前后通道都被封闭,根本无路可走,但是从上节分析可知,AMV实际上是可通行的。
在变向转弯路段,AMV以斜移、定点自转、沿曲线转弯方式运行,只要在上一小节分析所得的对应G区里规划路径,AMV就可以安全无碰撞,也不会导致路线过于保守,失去可通行机会而增加路程代价。
5 结 论
考虑AMV形状、大小的几何约束以及道路条件,通过建模计算出AMV以斜向平移、定点自转和沿曲线转弯等方式通过变向段的约束参数。AMV以斜移方式变向,所需通道宽度最大,以曲线转弯方式变向,所需通道宽度最小;最容易发生碰撞的地方,与车体长与宽的几何相关,在转角为arctan(Lc/Wc)或90°-arctan(Wc/Lc)之处。
模拟AMV连续运动通过变向段,得到其可通过的车体中心活动范围。当通道宽度在车体内切圆与外切圆之间,AMV以曲线转弯方式变向,车体可通过前提下其活动范围范围最大,以定点自转方式变向其活动范围次之,以斜移方式变向其活动范围范围最小。
相比传统方法膨胀地图障碍物后所得通道大小,无论AMV以哪种方式转弯变向,本文得到的通道约束参数更加精确,车体可活动范围更加明确,可保证车体中心在此范围内的路径都是既安全又不过于保守的。
参考文献:
[1] COSTA M M,SILVA M F. A Survey on Path Planning Algorithms for Mobile Robots [C]//2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC).Porto:IEEE,2019:1-7.
[2] PATLE B K,BABU L G,PANDEY A,et al. A review:On path planning strategies for navigation of mobile robot [J].Defence Technology,2019,15(4):582-606.
[3] OSMANKOVIC D,TAHIROVIC A,MAGNANI G. All terrain vehicle path planning based on D* lite and MPC based planning paradigm in discrete [C]//space2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM).Munich:IEEE,2017:334-339.
[4] GURUJI A K,AGARWAL H,Parsesiya D K. Time-efficient A* Algorithm for Robot Path Planning [J].Procedia Technology,2016,23:144-149.
[5] ZHONG X Y,TIAN J,HU H S,et al. Hybrid path planning based on safe A* algorithm and adaptive window approach for mobile robot in large-scale dynamic environment [J].Journal of Intelligent & Robotic Systems,2020,99:65-77.
[6] SPRUNK C,LAU B,PFAFF P. An accurate and efficient navigation system for omnidirectional robots in industrial environments [J].Autonomous Robots,2017,41:473-493.
[7] 王東云,徐艳平,瞿博阳.基于改进蜂群算法的机器人路径规划 [J].计算机系统应用,2017,26(2):145-150.
[8] PARASKEV T Z,ELIAS K X. AGV routing and motion planning in a flexible manufacturing system using a fuzzy-based genetic algorithm [J].The International Journal of Advanced Manufacturing Technology volume,2020,109:1801-1813.
[9] 余娜娜,李铁克,王柏琳,等.自动化分拣仓库中多AGV调度与路径规划算法 [J].计算机集成制造系统,2020,26(1):171-180.
[10] 王洪斌,尹鹏衡,郑维,等.基于改进的A*算法与动态窗口法的移动机器人路径规划 [J].机器人,2020,42(3):346-353.
作者简介:全思博(1983—),男,汉族,江西赣州人,高级工程师,博士,研究方向:移动机器人自主导航;通讯作者:王荣辉(1995—),男,汉族,浙江杭州人,硕士研究生,研究方向:机器视觉与智能机器人技术。