一种新型智能立体车库实践教学装置研发
2021-01-11陈万武陈观国卢俊康
陈万武,谢 飞,陈观国,卢俊康
(顺德职业技术学院,广东 佛山 528333)
随着汽车保有量的不断增长,停车取车难已经成为困扰人们日常生活的一大难题,立体车库在这种情况下应运而生,并以容量大、停车效率高等优点迅速得到人们的认可。立体车库这一具有广阔应用背景的产品,属于典型的机电一体化产品,它包含了当前机械、电子、检测、控制等领域成熟的先进技术,已成为技术密集型产品的代表,非常适合作为机电一体化实习教学的实验教学对象[1]。
近10 年来,我国立体车库得到了迅速的发展,但是这些立体车库生产厂家都只是针对实际产品进行开发,立体车库规模太大,很难运用到实际课堂当中。以智能车库控制为背景,进行“智能立体车库综合实践教学装置”研发,利于学生拆装操作的实践教学装置[2-3]。可以应用于电气自动化、机电一体化、工业机器人等专业的组态监控技术、PLC 技术、工业控制网络、STM32 单片机技术、传感器技术、变频器、伺服电机、触摸屏控制等课程的实验与实训教学。
1 装置总体机械结构
智能立体车库综合实践教学装置以3 层结构设计,每层设有5 个车位,拥有15 个车位的立体车库。要满足实践教学的基本需求,将实际生活中广泛应用的立体车库作为设计的前提与依据。在此基础上,采用垂直升降电梯(Z轴)运动、步进电机(Y轴)传动定位以及简易AGV 搬运小车(X轴)运行泊车。三者功能融为一体作为装置系统的硬件设施。装置如图1 所示。
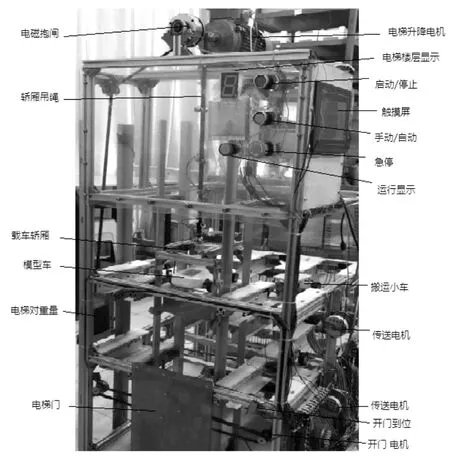
图1 智能立体车库实践教学装置
2 装置各模块的设计与功能实现
2.1 升降电梯
为了丰富装置的运行功能和丰富实践教学内容,本装置采用升降电梯作为垂直方向(Z轴)运输,模仿现实电梯功能进行设计。机械结构包括驱动装置,轿厢及对重装置、导向系统、门机机构、安全保护机构等。控制系统以三菱PLC 控制为核心。结合变频器调速、电磁抱闸制动和光电传感器运行检测,实现电梯安全运行功能[4-6]。电梯控制电路如图2 所示。
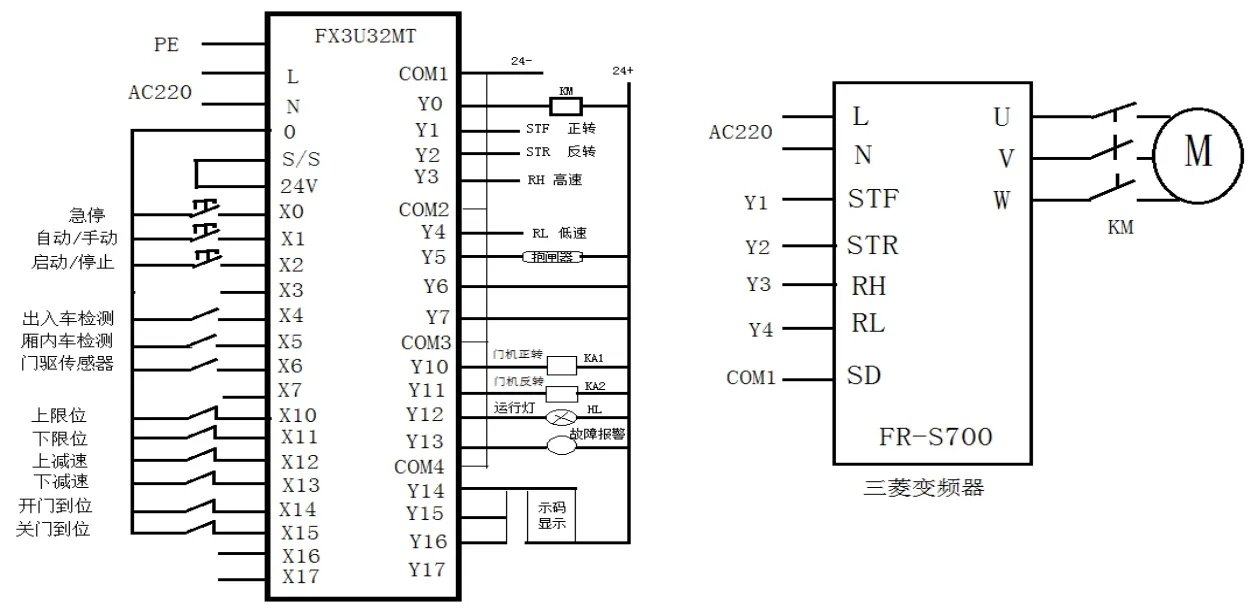
图2 电梯PLC 控制系统电路图
2.2 AGV 智能搬运小车设计
为了达到存取车高效、快捷、可靠而研究一款简易的自动引导智能搬运小车(AGV 小车)。在整个控制过程中,为整个系统柔性化、集成化、高效运行提供了重要保证。车体前后部设4 个车轮,后部两个是驱动和转向一体化车轮,每个车轮分别由各自的电动机驱动,驱动车轮由单片机脉冲驱动器控制,可改变两车轮的速度大小、方向。并在通道上敷设一条黑色胶带引导路线,结合8 组红外收发一体的寻迹传感器模块,形成自动引导系统,实现AGV 小车自动前进、后退、加减速及转向动作。
AGV 智能搬运小车以STM32 单片机为系统核心,结合RS232 串口模块、无线收发器与PLC 进行无线通信。在单片机与无线模块通信时、PLC 与无线模块通信时,两者都采用RS232 串口通信[6-8]。RS232 串口通信模块使用MAX3232 芯片作为信号电平转换芯片。此芯片外部仅需要四个0.1 uF 的小尺寸电容,控制电路简单,该模块原理图如图3 所示。

图3 RS232 串口通信模块
2.3 装置控制网络系统
“智能立体车库控制系统” 采用计算机对整个车库的运行状态进行实时远程监控,可编程控制器实现对车库各机构的控制,每个区域各采用1 个PLC实现相关功能的控制,各区的PLC 通过FX3U-485-DB 通信模块构成一个N:N 的工业控制网络,整个控制分成4 个区域,分别为A 区升降电梯、B 区第一层车库、C 区第二层车库、D 区第三层车库。其中B、C、D 三个区的PLC 各与一个单片机进行无线连接,与AGV 搬运小车无线通信。控制网络原理图见图4。其中A 区控制用的PLC 设定为主站,其余3 个为从站。监控计算机通过触摸屏再与主站进行通信。PLC 选择为三菱FX3U32MT 型,输入输出32点,基本单元晶体管输出[7-11]。

图4 车库网络系统控制原理图
2.4 触摸屏人机界面设计
本装置的人机交互是使用昆仑通态的触摸屏。型号:TPC7062KD,为WCGS 系列嵌入式一体化触摸屏。该触摸屏易于操作,性价比高。触摸屏人机界面设计,主界面主要由4 个主要功能按钮与主页返回按钮、时间日期及通信状态显示组成,如图5所示。车库中的每个车位设置车停位信息检测,并将检测到的车位停放信号传送到PLC,通过PLC 控制在触摸屏上发布相关车位信息[10-12],点击界面中不同的功能按钮可进入不同的功能界面(自动模式、手动模式、设置模式、运行显示),自动模式下泊车流程图如图6 所示。

图5 触摸屏人机界面
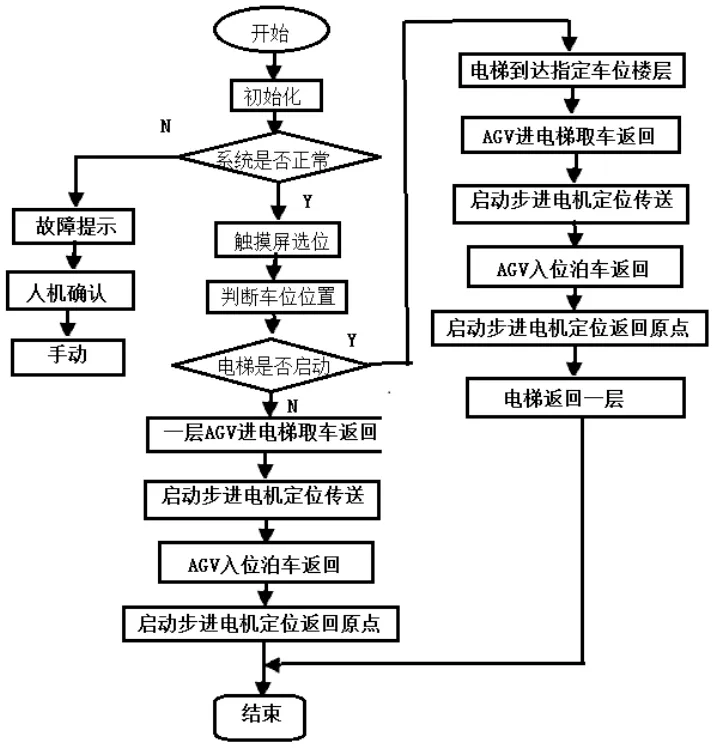
图6 自动泊车流程图
2.5 计算机远程监控
监控计算机上装载由组态王工控软件开发的远程监控画面,可以实时显示系统的工作状态,还可以通过监控界面下方的菜单栏选择不同的库区监控画面。数据库词典是监控界面开发所需要的全部数据变量的集合,通过数据变量的设定,能有效地链接上位机和下位机的工作,在TouchVew 运行时,它含有全部数据变量的当前值。为了能实现监控计算机与PLC 的通信,还必须在监控开发软件中进行相应的通信设置[11-13],本系统的通信参数设置如图7 所示[9]。

图7 计算机监控通信设置
3 装置在教学中的应用
智能立体车库综合实践装置在实践教学中可应用于工业机器人、电气自动化技术、机电一体化等相关专业的电气控制、PLC 编程、STM32 单片机、触摸屏、变频器、工业控制等课程的实验实训教学。可设置实践教学项目10 个,见表1 所示。项目由易到难,层层递进。每个项目既可以独立操作,又可以将多个项目合成一个大项目来操练,还可以将所有项目合成一个完整的系统,使学生对智能立体车库的智能控制系统有一定的认识和理解[13-15]。

表1 “智能立体车库综合实践装置”开设教学项目
4 结语
在应用中经过多次调试和改进,智能立体车库综合实践教学装置在机械结构上和控制系统中十分贴近真实应用的立体车库,把升降电梯和智能搬运小车融合到智能车库系统中,控制系统灵活、可拓展、智能化控制程度高。装置已申请1 个发明专利和2 个实用新型专利。并且在教学改革上,加强了学生对PLC 可编程控制技术、组态监控技术、传感器技术等相关课程理论知识的理解,提高了学生动手能力,加深了工业控制网络课程的开发。近3 年,在国家级、省级多项竞赛中获奖,包括:2017 年全国职业院校技能大赛高职组“智能电梯装调与维护”比赛中荣获二等奖;2018 年第三届“挑战杯”广东职业院校创新创效创业大赛二等奖;2019 年获第十四届全国高等职业院校“发明杯”大学生创新创业大赛一等奖。
