基于能量分析的欠驱动飞行吊运系统协同控制
2021-01-08方勇纯
梁 潇,王 杨,何 慰,孙 宁,方勇纯
(南开大学人工智能学院机器人与信息自动化研究所,天津 300350;南开大学天津市智能机器人技术重点实验室,天津 300350)
1 引言
机电系统与人们生活密切相关,随着精密加工和各类先进控制算法的发展,对机电一体化技术的研究极为关键[1-3].作为一类应用广泛的机电系统,旋翼无人飞行器能够在空中悬停,具有良好的灵活性和较强的机动性,已在搜索和救援、环境监测和货物运输、航天拍摄、林火监测等多个方面发挥着重要作用[4-8].值得一提的是,旋翼飞行器相比地面移动机器人受地势、地形影响较小,极大地扩展了其作业范围.由于这一优势,借助夹具、机械臂、吊绳悬挂3种方式,旋翼飞行器可以在地面车辆难以到达的环境下承担各种运输任务.
夹具抓握,即在飞行器底端安装夹持器以携带负载飞行[9-10],但这种方式需要设计复杂的夹持器电子与机械结构,造成了更多的成本投入,同时也将影响旋翼飞行器的转动特性,降低飞行的灵活性.机械臂操控,即在飞行器底端安装自由度更高的机械臂携带负载[11-12],能够延长负载可以到达的空间范围,但机械臂的使用同样会对系统机动性造成很大影响,此外,飞行器和机械臂的运动将对彼此产生扰动,为控制带来极大困难.借助夹具和机械臂的运送方式会影响运输的平稳,且成本较高,而通过吊绳运送负载可有效避免上述难题,悬挂运送的方法保留了飞行器的机动性,且不受负载体积的限制,因此应用最为广泛.
利用吊绳进行运送时,需要将负载运送至指定位置,由于负载的运动无法直接控制,可能对周围带来安全隐患,因此抑制并消除负载摆动极为关键.针对旋翼飞行器吊运系统,有开环控制和闭环控制两类方案.输入整形[13]、动态规划[14]、基于混合整数二次规划的轨迹生成算法[15]、基于伪谱法的时间最优运动规划[16]是典型的开环控制方案.与开环控制相比,闭环控制方案由于利用瞬时反馈信号,因而往往具有更好的控制性能.在文献[17]中,基于输入状态稳定理论,研究人员对系统解耦,设计了兼顾飞行器定位和负载消摆的控制器.Guerrero等人[18-19]采用互联及阻尼分配的无源性控制方案,实现了运送过程中负载摆动的抑制与消除.文献[20]设计了一种非线性控制器,并通过李雅普诺夫方法和拉塞尔不变性原理对闭环系统的稳定性进行了证明.Yu等人[21]为实现负载轨迹跟踪,提出了基于反步法的非线性控制策略,能够保证闭环系统渐近稳定.文献[22-23]基于飞行吊运系统的串级特性,提出了非线性分层调节控制方案,能够针对系统内外环分别设计控制输入,给设计过程带来了极大便捷,且控制形式简洁,便于调节.
如前所述,目前对飞行吊运系统的研究往往考虑单个飞行器的运送任务,当负载质量超过单个飞行器的载荷上限时,就需要多个飞行器协同作业.此时,由于使用多架飞行器共同执行任务,不仅使系统的自由度更高,也使得系统动力学特性更为复杂.具体而言,单个旋翼飞行器吊运负载时即为欠驱动系统[24-29],旋翼飞行器本身也呈现欠驱动特性.此外,负载摆动和飞行器平动之间存在运动耦合,更多的飞行器意味着这一耦合特性也将更为复杂.考虑到多机需要协同运动至指定目标位置,与此同时对负载的摆动进行抑制并消除,这些都为协同吊运的控制带来困难.
针对此,本文为两个飞行器的协同吊运任务提出了一种基于能量分析的非线性控制方案,在大幅提高系统载荷能力的前提下,能够有效消除负载摆动.首先,文章构造关于两飞行器及负载动态的储能函数,进而设计两飞行器所需推力与期望姿态,在兼顾执行器饱和约束,避免了期望姿态奇异性问题的同时,考虑了两机的协调运动.随后,通过严谨的数学分析,基于拉塞尔不变性原理证明了闭环系统的稳定性;仿真结果表明,该方法具有良好的控制性能,对不确定参数和外界干扰均有较好的鲁棒性.
本文的其余部分组织如下:第2节简要描述了系统动力学模型,并给出了控制目标;第3节完成了控制器的设计以及闭环稳定性分析;第4节通过仿真将所提方法与现有方法进行了对比;第5节对本文工作进行了总结与展望.
2 问题描述
欠驱动旋翼飞行器协同吊运系统示意图如图1所示.

图1 协同飞行吊运系统示意图Fig.1 Illustration of a cooperative aerial transportation system
坐标系Y OZ为固定于大地的惯性坐标系,图中:m1,m2代表两飞行器的质量;m3为负载质量;l0表示两吊绳与负载连接端间的距离;l1,l2代表绳长;l3代表负载厚度的一半;θ=[θ1θ2θ3]T∈R3,其中:θ1,θ2为两吊绳与Z轴正半轴之间的夹角;θ3表示负载的偏转角;φ1,φ2代表飞行器的姿态角;ξ1=[y1z1]T∈R2,ξ2=[y2z2]T∈R2分别为两飞行器的坐标.为便于描述,定义如下简写表达:

系统动力学模型如下:

式中:q=[y1z1y2z2θ1θ2θ3]T∈R7为表示关于飞行器位置与负载姿态的状态向量;矩阵Mc∈R7×7和Vc∈R7×7分别表示惯量矩阵与向心-柯氏力矩阵,其具体表达式参见附录.重力向量与控制向量G,U∈R7形式如下:

其中u1,u2,u3,u4分别表示两飞行器推力在空间坐标轴Y,Z上的分量,分别表达为
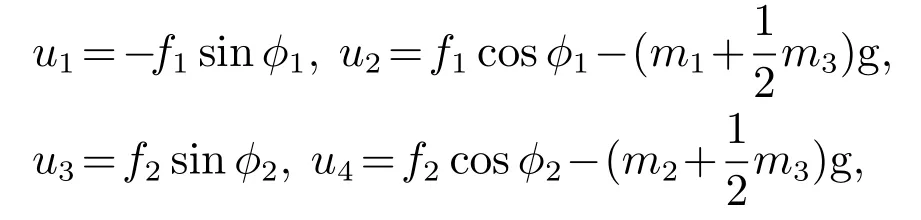
式中f1,f2分别表示两飞行器推力幅值.
为方便接下来的控制器设计与稳定性分析,将式(1)展开为如下形式:

针对实际工作场景,在此作如下合理假设[18,20,22-23,25,29]:
假设1考虑到协同吊运系统的实际工作情况,吊绳及负载摆动角度满足约束

对于欠驱动协同吊运系统而言,控制目标是使两飞行器快速、精确地到达目标位置ξ1d=[y1dz1d]T,ξ2d=[y2dz2d]T,同时有效抑制并消除负载的摆动.不失一般性,选取两飞行器目标位置满足如下关系:

此时,两吊绳与负载的期望角度为

综上,控制目标可表述如下:

3 主要结果
本节将首先阐述控制器设计的过程,随后给出闭环系统信号的有界性和收敛性分析.
3.1 控制器设计
为完成上述控制目标,首先定义如下误差量:

通过对欠驱动协同吊运系统的能量分析,可构造如下储能函数:

式中kp1,kp2,kp3,kp4∈R+为正控制增益.对式(10)关于时间求导,代入式(2)-(8)后整理可得

基于此,设计控制输入ut=[u1u2u3u4]T∈R4为如下形式:

其中:e=[e1e2e3e4]T∈R4代表两飞行器组合定位误差向量;Kp=diag{[kp1kp2kp3xkp4]},Kd=为正控制增益矩阵.将式(12)代入式(11)后可以得到
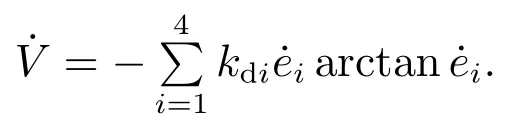
经分析可知,在该控制输入的作用下,闭环系统的平衡点是渐近稳定的.然而,负载的摆动信息没有直观反映在控制输入中,因此,在摆动抑制方面仍有提升空间.
进一步地,基于式(12),提出如下改进的非线性控制律:

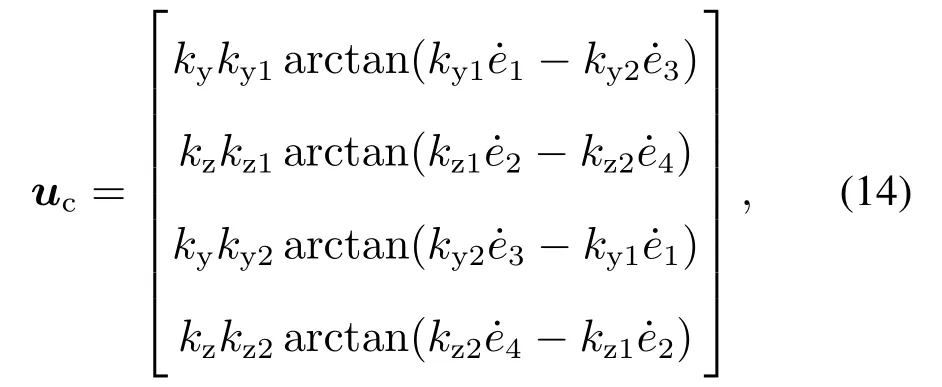
其中ky,ky1,ky2,kz,kz1,kz2∈R+为正控制增益.
注1两飞行器推力f1,f2与期望姿态φ1d,φ2d可通过控制信号u1,u2,u3,u4计算得到,具体表达如下:

注2由注1可知,通过合适的参数选取,即可将控制输入约束在一定范围内.进一步地,将所取控制参数限定在如下范围:

即可避免期望姿态产生奇异性问题.
注3式(13)中控制输入ut的第3项通过将负载摆动信号引入反馈控制律,提高了可驱动的飞行器运动与欠驱动的负载摆动之间的耦合关系,因而,能够提升控制系统的消摆性能.
注4式(13)中控制输入ut的第4项uc是协调作用项,分别利用速度差作为反馈信号,从而提高飞行运动的一致性,实现两个飞行器之间的协调运动.
3.2 稳定性分析
本小节将对闭环系统信号的稳定性进行分析.
定理1所提控制方案(13)能保证两飞行器协同吊运负载至指定位置,并且抑制负载摆动,使系统状态渐近收敛于平衡点,即

证将式(13)代入式(11)可以得到

因而,V(t)∈L∞.基于此,由式(10),可以得到如下结论:

接下来,定义集合Φ为

并记Γ为Φ中最大的不变集.根据式(16)可知,在不变集Γ中有

式中β1,β2,β3,β4∈R表示待定常数.接下来分两步完成定理证明:
步骤1证明在不变集Γ中:e1(t)=0,e2(t)=0,e3(t)=0,e4(t)=0.
将式(19)代入式(13)并结合式(2)-(5)可得

对式(20)-(23)两边关于时间作积分,有如下结果:

其中λ1,λ2,λ3,λ4为待定常数.对β1,β2,β3,β4进行分析,以式(24)为例,若β1≠0,有

步骤2接下来,将证明在不变集Γ中,θ1(t)=0,θ2(t)=0,θ3(t)=0.
将式(19)代入式(6)-(8)整理可得

将式(28)代入式(20)-(21)可得

进一步地,将式(32)与式(33)两边分别乘以C1,S1后相加,有如下结果:

联立式(34)与式(29)有

同理,将式(32)-(33)两分别乘以C2(C3),-S2(S3)后相加,与式(30)-(31)对照,经类似分析可以得到

由式(28)(35)-(36)可知,最大不变集Γ仅包含平衡点根据拉塞尔不变性原理[30],可完成本定理中结论的证明.证毕.
4 仿真验证与分析
本节将给出数值仿真结果,同时将其与PD(proportional differential)控制和线性二次型调节器(linear quadratic regulator,LQR)控制的结果对比,进行3组仿真测试,以评估所提控制方案在飞行器定位与吊绳、负载消摆方面的实际性能.
第1组在本组仿真中,将系统参数设置如下:

两飞行器的起始位置和目标位置分别为

初始摆动角度为

本文方法的控制增益选取为

PD控制器增益选取为

LQR控制中矩阵Q,R分别选取为

经计算得最优控制增益为

仿真结果如图2所示,从中可以看出,3种控制方法都能使飞行器到达目标位置.值得注意的是,由于协同控制项和摆动信息项的引入,本文所提基于能量的控制方法相比PD控制和LQR控制,对负载摆动具有更加显著的抑制和消除作用.
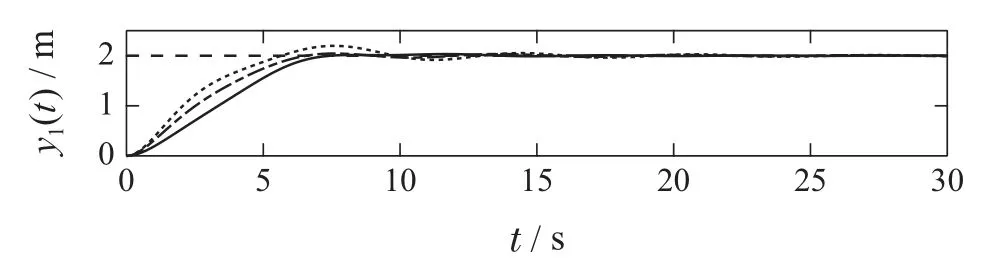

图2 仿真1结果Fig.2 Results of Simulation 1
第2组为验证所提方法对不确定参数的鲁棒性,在本组仿真中,将吊绳及负载参数改变为

将两飞行器的起始位置和目标位置改变为

所提方法与PD控制增益选取以及LQR控制中的Q,R矩阵选取与第1组仿真相同.由于LQR方法对系统参数的依赖,其控制增益需相应修改为
仿真结果如图3所示,将其与第1组仿真结果进行对比,可以看出,在不改变控制增益的情况下PD控制器和所提方法均可实现飞行器定位与负载消摆的目标.同时,本文所提方法在摆动抑制方面依然表现出了更好的性能.
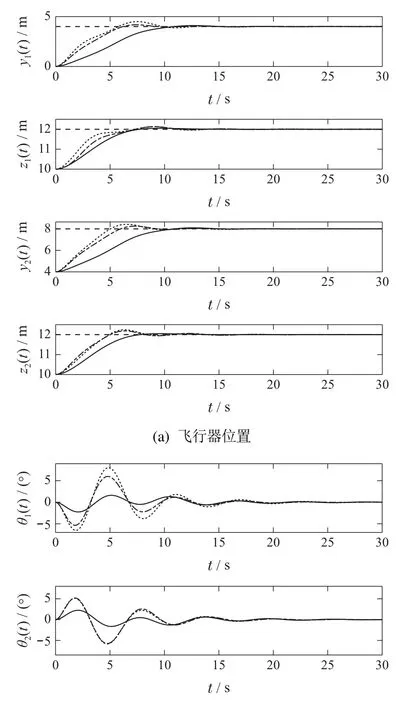

图3 仿真2结果Fig.3 Results of Simulation 2
第3组在本组测试中,参数设置和控制增益与第1组完全相同.为模拟风力等外界扰动的影响,在30 s至30.5 s,60 s至60.5 s对两根吊绳对应的摆动角度θ1(t)和θ2(t)分别施加一个幅值为5°的脉冲干扰.
仿真结果如图4所示.3种方法在受到扰动后最终都能将飞行器定位在目标位置并保持稳定,所提方法的负载摆角θ3(t)在受到扰动后收敛更快.这一仿真情形证明了,在有扰动存在的情况下,本文所提控制方法具有明显优势.


图4 仿真3结果Fig.4 Results of Simulation 3
5 总结与展望
针对欠驱动旋翼无人机协同吊运系统,本文设计了一种基于能量分析的控制方法.该方法不仅可以准确快速的控制两飞行器运动至指定位置,而且可有效消除负载摆动.同时,所提控制方案能够将控制输入约束在一定范围内,进而避免期望姿态的奇异性问题.文中对所提控制器的性能进行了严格的理论分析,并通过数值仿真验证了算法的控制性能.在接下来的工作中,将进一步扩展本文方法,将其应用于更多个数飞行器的协同吊运问题.
附录
对称矩阵Mc中元素表达如下:


其余元素皆为零.
