基于双岗制的管制员工作负荷评估
2021-01-07李虎,罗军
李 虎,罗 军
(中国民用航空飞行学院 空中交通管理学院,四川 广汉 618307)
随着空中交通情况不断复杂,空域管理的难度随之上升,给一线指挥员带来了越来越大的工作压力[1]。 在繁忙的时间段内管制员经常处于超负荷工作状态,长期以后不仅会对管制员的积极性有所影响,而且会增加管制差错发生的概率影响飞行安全,经过研究表明超负荷工作会直接影响到人员的工作效果,所以我们要对管制员的工作负荷进行分析,合理进行人员配备和扇区划分,为民航的安全运行奠定基础[2]。
1978年,D. K. Schmidt定义了管制员操作日常事情所需时间、管制扇区的飞行流量、飞机延误三者的关系,采用排队论方法对管制员的工作负荷进行研究[3]。1979 年,A.Robertson对管制员工作负荷模型的用途和用法给出详细论证[4]。1986年O‘Donnell等提出将工作负荷测量分为三种,主观测量、生理测量和客观测量[5]。英国针对雷达管制员工作负荷提出的“DORATASK”工作评估[6]就是客观测量的一种。在国内,韩松臣等较早利用 DORATASK思想对管制员操作负荷耗时来表征工作负荷[7-8]。万莉莉[9]和SHAKOURI M[10]等在DORATASK和MBB方法基础上对管制员工作分类并建立主观、客观工作负荷模型,将测量结果用数据表达。在岗位操作中,传统的DORATASK方法存在建模不统一、模糊粗糙、受主观影响没有考虑“双岗制”的特点,从而导致不对称的工作负荷越来越严重。
本文采用改进的 DORATASK方法对管制指挥席和协调席进行工作负荷评估,这样能更好地分析双岗制的工作模式,对今后的双岗制人员安排和扇区合理规划提供理论基础。
1 DORATASK方法与双岗制结合
1.1 DORATASK方法分类
DORATASK方法对管制员工作分成了三类,一类为可观测的工作,可以直接测量,例如无线电与电话通信、填写进程单和电话协调等。 另一类为不可观测的工作,不能靠人直接记录,例如管制员思考和监控雷达屏幕等[11]。第三类是过渡时间,就是当管制员结束上一个管制任务到开始下一个管制任务之间的大脑恢复时间。虽然这是一个有些抽象的概念但对于管制员的工作来说是极其重要的一部分。
1.2 双岗制职责
随着民航事业的不断发展,一个管制席位有两名管制员负责是现在空管部门普遍实行的一种工作方式。 实施“双岗制”的要求在1997年被中国民航空管局提出,意思是在每个扇区内至少要两名管制员负责该扇区的管制工作。一名管制员负责直接对航空器指挥,发布管制指令,对所管辖的航空器的安全飞行负责,即管制指挥席;另一名管制员负责本管制区和邻近空管单位沟通管制信息和相关协调工作,同时负责对管制指挥的监督检查,即管制协调席[12]。
2 基于改进DORATASK方法的工作负荷模型
2.1 管制员工作任务分类
基于“双岗制”的工作要求,一个扇区内不得少于两名正式管制员,一个负责发出指令,另一个负责协调相邻单位和监督发出的指令,所以见表1,两名管制员的具体工作按照类别进行细化区分。

表1 工作任务分类
2.2 模型的建立
根据表可以建立如下模型,指挥席工作负荷为式(1)
WL1=
i=1,2,…,6
(1)
式(1)中WL11为管制员对飞行员发送指令和收听飞行员回复的指令;WL12为对雷达屏幕的操作;WL13为指挥席与协调席之间的沟通;WL14为对雷达屏幕的扫视;WL15为对发布管制指令的思考;WL16为恢复时间。由于大部分终端区包括北京终端区都使用了电子进程单所以这里对进程单的书写、修改、扫视等操作都忽落不计。
WL2=

i=1,2,…,7
(2)
式(2)为协调席工作负荷,其中WL21为开展和邻近管制扇区的管制移交和协调工作,开展与主管席的协调(包括通航和军航的协调);WL22为对雷达屏幕的操作;WL23为监听管制员对飞机员发送的指令和飞行员回复的指令;WL24为指挥席与协调席之间的沟通;WL25为雷达屏幕扫视;WL26为对管制指令的思考;WL27为恢复时间。
这里的Δt为一小时,换算成秒是3 600 s。
2.3 模型参数设定
2.3.1 指挥席工作负荷参数确定
指挥席的可见负荷中最重要的部分是管制员向飞行员发送指令并听取飞行员的答复。目前,所有管制单位都有记录设备,可以直接记录地面和空中通话的内容和时间[13]。对雷达屏幕的操作包括切换、拖动雷达标牌等。这里的时间可以通过人工观察指挥一架飞机的键盘和鼠标操作时间,取平均值插入公式中得到。对进程单的填写、修改等操作我们忽落不计。指挥席与协调席之间的沟通可以现场计数,即观察指挥一架飞机的沟通次数乘以时间取平均值。
指挥席不可见的工作负荷由对雷达屏幕的扫视、进程单扫视和对发布管制指令的思考三部分组成。 这些数据都难以对其进行精确测量和统计,鉴于在一线进近管制实习的机会,在一段时间内向多位的管制员进行了交流并询问后得到数据,最终根据经验将管制员对雷达屏幕的扫视次数定在该时段内飞机数量的2倍,每次扫视平均时间2秒。对管制指令的思考时间设定为,每发布一次指令前思考1秒。对进程单的扫视的次数是飞机数量的2倍,每次扫视时间为2秒。
脑力恢复时间被包含于语音记录设备统计的陆空通话总时间内,所以这里就不用再单独计算。
2.3.2 协调席工作负荷参数设定
协调席可见的工作负荷,由于监听管制员发送的指令和飞行员回复的指令是协调席非常重要的一项工作,所以可以用陆空通话的总时间作为监听时间。 其余几项工作与指挥席的统计方法类似,这里就不进行重复。
协调席不可见的工作负荷,通过统计某时间段内的飞机数量乘以2就是协调席管制员对雷达屏幕的扫视次数,每次扫视的时间为2秒。管制指令的思考时间,在每个时间段内定义为每条指令1秒乘以该时间段内的指令数。
脑力恢复时间的计算与上述指挥席用一样的方式。
3 模型验证与分析
3.1 数据的采集与计算
本文选取北京新终端区作为实例进行结合,在2019年10月10日零时北京新终端管制区正式生效,管辖的空域面积扩大到3.45万平方公里,面积为之前的2倍[14]。区内40条进场航线与97条离场航线通过18个进出港点衔接主干航路航线,而且扇区也有之前的六个功能扇区更新为九个物理扇区,管制席位也随之增加。我们在九个扇区中随机选取其中的西二扇区作为本文数据来源,以一小时为一个单位时间段,总共选取早七点到晚七点12个单位时间段,分别统计每个小时内的航班架次和工作负荷等,数据采集包括现场观测的数据和语音记录仪记录的数据,同时发现电子进程单已经在北京新终端区运用,所以指挥席对进程单书写、修改等操作可以忽落不计。
为了减少评估数据的工作量,在对指挥一架航空器的各参数采样时可以选取三个时间段的平均值来作为任意时间段内的参数,如表2。
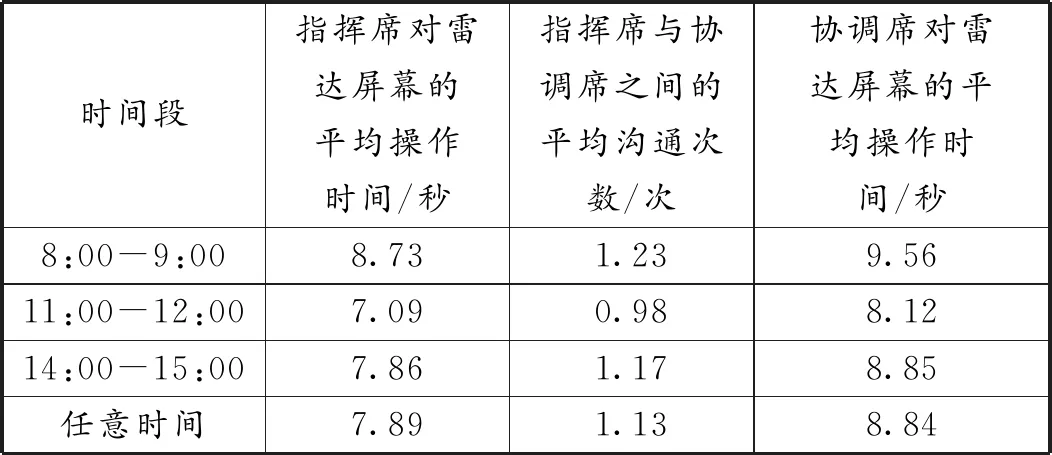
表2 参数确定
针对北京终端区西二扇区的管制席和协调席工作负荷就可以根据以下简化的式(3)、(4)模型来测量。
WL1=
(3)
WL2=
(4)
该进近管制区西二扇区在上午7时至下午7时指挥席和协调席管制员的工作量计算,见表3。

表3 工作负荷统计
3.2 航班架次与工作负荷的相关性分析
利用MATLAB分别进行一元线性回归分析,验证指挥席和协调席的工作负荷与飞机数量正相关。首先,分别代入数据得到散点图1、2,从图中可以看出,两个变量是线性相关的,之后为了更好的检验模型的有效性和敏感性进行残差分析得到残差图3、4。最后,分别得到了协调席、指挥席的工作负荷与飞机数量的回归方程,具体如下。
y1=26.9376+1.5967x
y2=9.7484+1.4965x
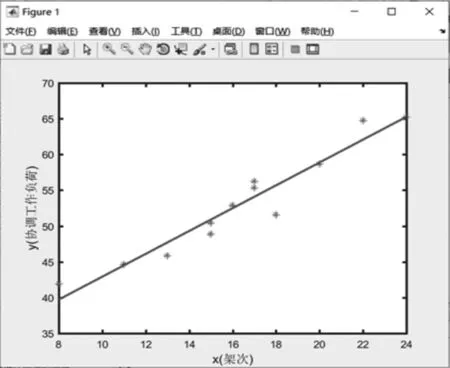
图1 协调工作负荷散点图
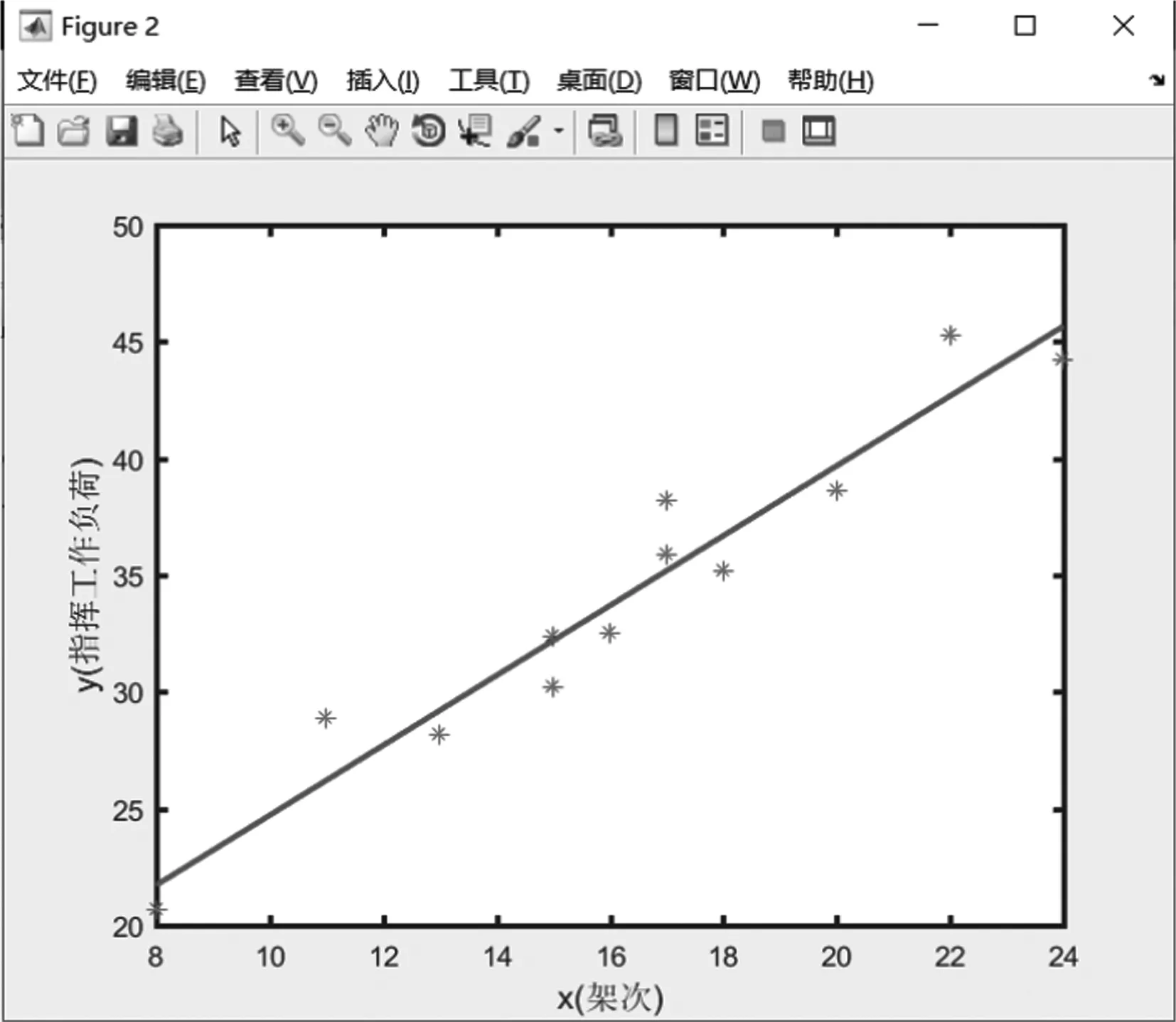
图2 指挥工作负荷散点图
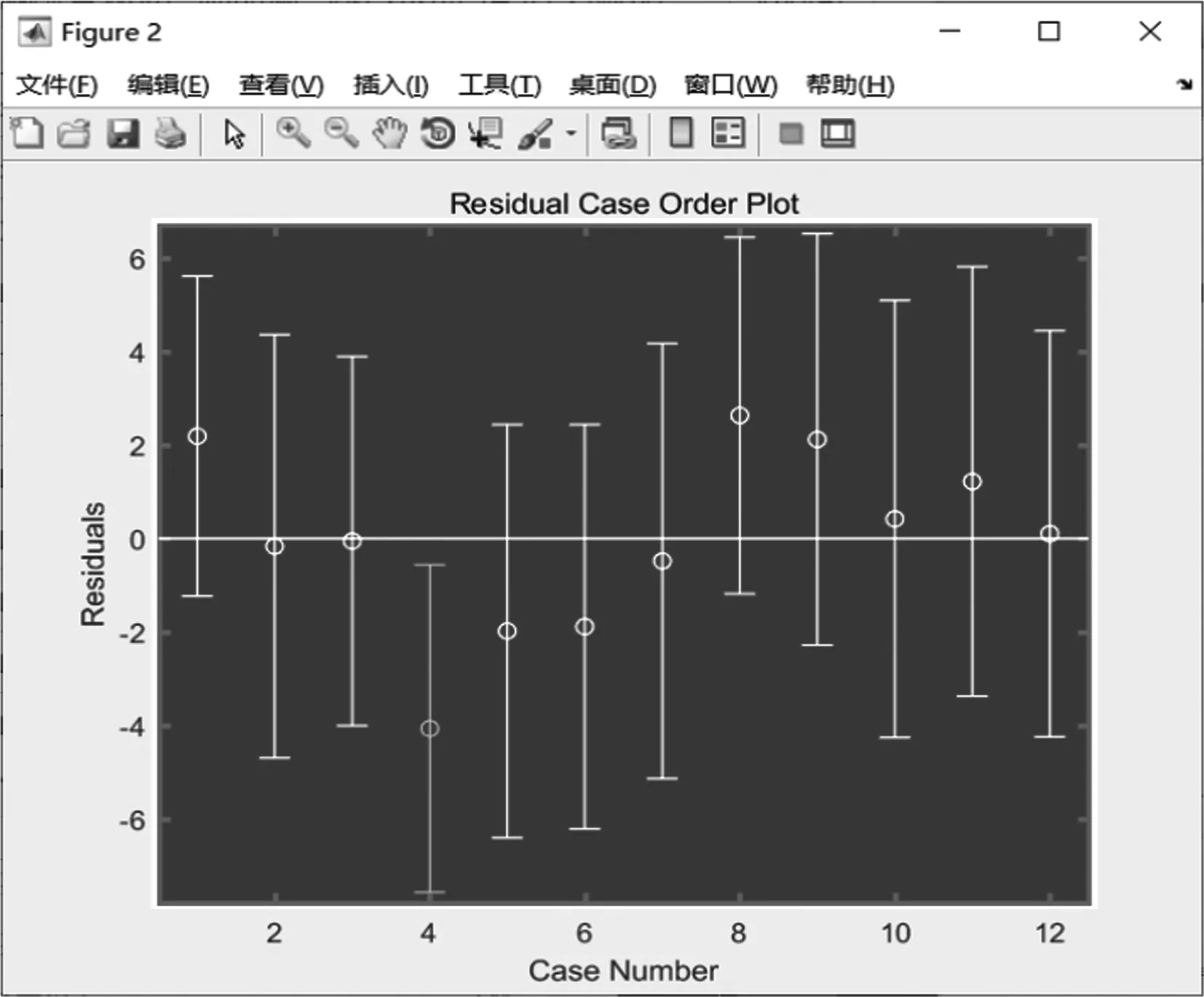
图3 协调工作负荷残差图
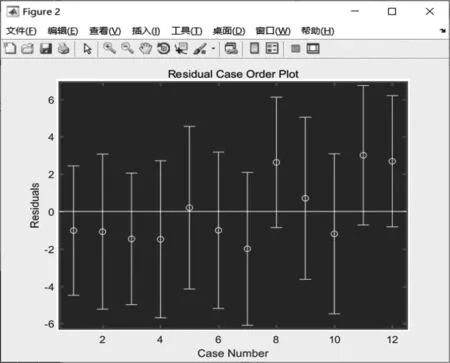
图4 指挥工作负荷残差图
在MATLAB的输出结果中还有一项S用于检验回归模型的统计量,如表4,其意义如下:如果变量的线性相关性很贴合,则R2的值约等于1,说明模型有效;如果满足F1-α(1,n-2) 表4 输出结果 根据图示测量结果和表中的数据,可以看出,指挥席工作负荷与飞机数量、协调席工作负荷与飞机数量呈现正向的变化,且拟合程度较为明显,测量结果随航班架次的变化反映了模型的可行性和准确性。 1)基于双岗制的管制员工作负荷计算方法能够很好地应用于管制席位工作量计算。 2)使用改进的预测模型分别对指挥席管制员和协调席管制员工作量进行计算,更好的反映出飞机数量与管制员工作负荷有正相关性,最后用MATLAB进行验证,比起传统DORATASK预测模型更加实用和精确。 另外,在以后的研究中可以考虑运用文中对双岗制管制员负荷的评估来作为人员配备的一个依据,同时,在研究中发现运用DORATASK思想建模对管制员工作量评估的灵敏性有待提高,这都是值得我们未来发掘的地方。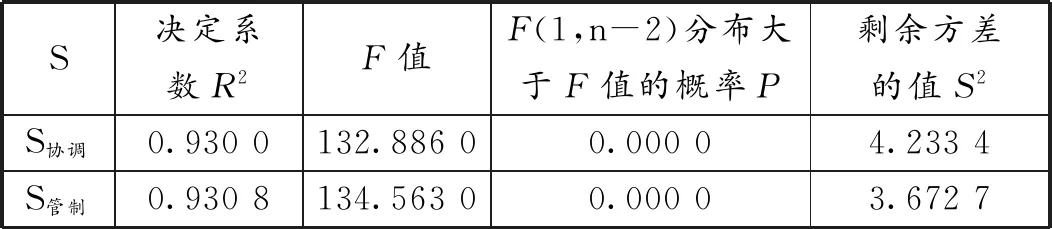
4 结论