仿生耕糟刀的设计与仿真实验
2021-01-06张志丰张峻霞
张志丰 张峻霞 张 琰
(1. 天津科技大学机械工程学院,天津 300222;2. 天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津 300222)
过滤槽法是一种传统的过滤麦芽汁的方法,世界上大约75%的啤酒酿造使用的是过滤槽生产的麦芽汁[1]。耕糟刀作为过滤槽的关键部件,通过绕中心轴旋转耙松被压实的麦糟层,实现加速麦芽汁过滤和辅助洗糟的功能[2-3],达到缩短收集麦芽汁时长,保证麦芽汁质量,提高啤酒酿造品质的目的。然而目前与耕糟刀相关的著述和文献较少[4-5],耕糟刀的设计和制造也存在较大的随意性,主要依靠经验,现用耕糟刀的形态是在生产中逐步改良的结果。仿生设计通过对自然生物功能及形态[6]进行研究借鉴,能有效解决工程问题[7]。课题拟通过对功能相似的生物形态特征进行系统的分析,采用仿生设计方法,以实现对流体的低剪切应力、优化流场特征为目标,解决耕糟刀优化设计的问题。
1 耕糟刀功能分析
耕糟刀由上下两个主要部分构成,如图1(a)所示,上部分称为刀板,其截面呈楔形;下部分称为耕犁,其底面呈三角形。在实际应用中常见的耕糟刀通常分为单脚耕糟刀、双脚耕糟刀、燕尾耕糟刀(见图1)[8]。耕糟刀以过滤槽中心轴为圆心慢速旋转,远离轴的耕糟刀线速度逐渐增大,因此在大型过滤槽中,随旋转半径不同会装备不同形式的耕糟刀,确保能均匀耕糟。
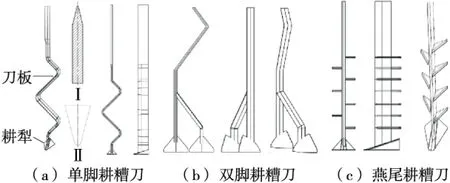
图1 耕糟刀结构与形式Figure 1 Structure and form of raking knives
课题的优化设计对象是单脚耕糟刀,通过逆向工程方法获得原型耕糟刀的三维模型。基于流体力学原理,使用Fluent仿真方法,模拟耕糟刀在过滤槽内耙松麦糟的耕糟过程。仿真试验设定在直径800 mm、高300 mm的过滤槽内以双臂耕糟机各带动3个耕糟刀旋转耕糟,转速设定为10 r/min,槽内流体设定为固液两相流,其中液相麦芽汁密度1 076 kg/m3,黏度0.002 kg/(m·s),固相麦糟颗粒设定为直径为6.88 mm的球体,密度2 000 kg/m3。运算后绘制速度云图、速度矢量图和剪切应力云图见图2。原型耕糟刀速度云图显示在靠近中心轴区域的流体速度最高[图2(a)],速度矢量图显示该区域流场流动方向比较混乱[图2(b)],流体的流速范围为0.000~7.129E-001 m/s;剪切应力云图显示耕犁曲面位置产生的剪切应力较大[图2(c)],应力值范围为6.503E-011~3.106E-006 Pa,在过滤槽壁面位置因流体与壁面发生相对运动而产生剪切应力,壁面切应力分布不均匀[图2(d)],应力值范围为2.574E-003~3.699E-001 Pa。
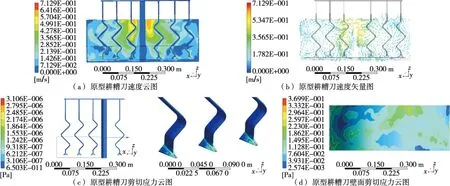
图2 原型耕糟刀仿真模拟结果Figure 2 Simulation results of prototype raking knife
2 生物形态及功能相似性分析
过滤槽法是利用滤饼过滤的方法,将沉降的麦糟层作为过滤介质,因此在耕糟过程中需保护麦糟层结构,保证耕糟刀在糟层内穿行时不产生过大的剪切力,同时要减小对流体的扰动和推力,避免流体与壁面之间出现相对运动。针对这些设计要求,仿生耕糟刀的设计目标为:降低耕糟刀对麦糟层产生的剪切力,耕糟时不产生湍流、不破坏糟层结构、不压实下方糟层。
对自然界有类似功能的生物进行筛选,发现蝼蛄爪趾在楔入土壤时有相似性。蝼蛄爪趾在楔入土壤时,因其特殊的楔形构形,能够快速楔入土壤,在楔入过程中对上层土壤的松土能力强,同时不会对下层土壤产生扰动。两者在功能特征上具有一定的相似性。
对蝼蛄挖掘土壤的过程进行仿真分析,可以直观地了解各个爪趾在挖掘时的力学特征。首先建立蝼蛄爪趾的三维模型,提取试样的分层截面图像是构建爪趾逆向模型的基础,将试样及定位参照物用树脂包埋,逐次打磨一定的高度,使用徕卡LEICA-S6D体视显微镜对每次打磨后的蝼蛄爪趾截面进行图像采集。依次提取试样轮廓曲线,按顺序及相邻截面距离将样条曲线垂直移动到相应空间位置。对17个截面切片的内外轮廓曲线进行放样,分别得到蝼蛄爪趾的外侧表皮生物模型和内腔生物模型,将两个生物模型进行组合完成4个爪趾的三维模型[图3(a)],分别对4个爪趾进行有限元分析模拟其在土壤中的挖掘过程[图3(b)]。
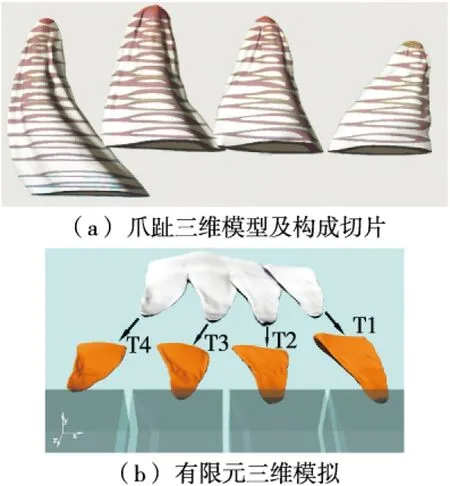
图3 爪趾的三维模型Figure 3 Three dimensional model of claw teeth
3 蝼蛄爪趾楔入土壤动力学有限元仿真分析
为了明确4个爪趾在楔入土壤时的力学差别和对土壤作用效果的差别,爪趾以一定角度楔入土壤,选取23.7°楔入土壤,其中23.7°是在试验中测得爪趾挖掘力最大时的角度[9-10],试验中保证4个爪趾在胫节上的相对角度不变,分别设定相同的运动条件和相同的土壤材料参数进行仿真模拟,运算得到土壤产生的最大应力和土壤的最大位移情况。爪趾模型采用前文通过逆向建模方法构建的生物模型。将爪趾模型的趾尖移动到恰好接触土壤模型的位置,爪趾的运动特征设定为以0.05 s的时间楔入土壤模型10 mm。土壤参数采用LS-DYNA971的土壤材料MAT147(MAT_FHWA_SOIL),该模型采用的是基于Mohr-Coulomb准则修正的Drucker-Prager准则[11],其屈服表面的数学表述
(1)
式中:
F——屈服面;
P——压力,Pa;
φ——内摩擦角,°;
J2——应力偏张量的第二不变量;
K(θ)——应力罗德角函数;
c——黏聚力,N;
γ——定义修正后屈服面和标准Mohr-Coulomb屈服面之间贴合度的参数。
土壤参数设置[12]如表1所示。

表1 土壤主要参数设置Table 1 Soil parameter
结果(表2和表3)显示,爪趾T4在以23.7°楔入土壤时对土壤产生的应力为4.044 Pa,在4个爪趾中相对最小,爪趾T1楔入土壤时产生的应变最小,为18.34 mm。在选取仿生原型时根据耕糟刀的设计目标:以应力相对最小为标准,选择土壤应变相对较小的生物原型。因此选择以爪趾T4为生物形态原型,提取爪趾的生物轮廓曲线,仿生耕糟刀耕犁采用23.7°的楔入角度。

表2 土壤最大应力Table 2 Maximum stress of soil Pa

表3 土壤最大应变Table 3 Maximum strain of soil mm
4 仿生耕糟刀设计与分析
由获得的蝼蛄爪趾逆向模型可得模型的网格曲线,抽离紧贴模型曲面的网格曲线(轴向、径向方向的生物曲线),如图4所示。
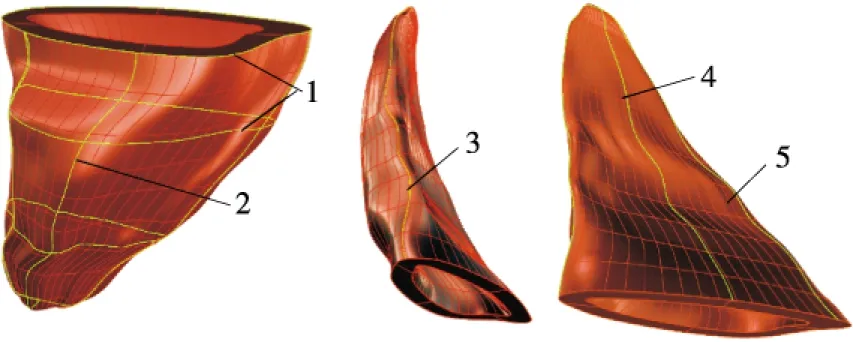
1. 截面曲线 2. 凸筋曲线 3. 趾下侧边缘线 4. 外侧面曲线 5. 趾上侧边缘线
提取蝼蛄爪趾的生物轮廓曲线,采用投影方法,取与趾楔入土壤运动方向平行的平面,将轮廓线投影到平面获得曲线(如图5所示)。对爪趾轮廓线进行投影获得投影曲线后,对投影曲线进行拟合,获得曲线拟合方程:
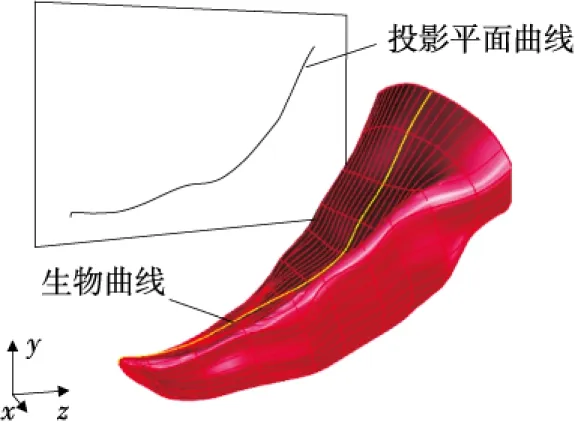
图5 投影方法获得生物曲线的平面线
φ(x)=A1x3+A2x2+A3x+A4。
(2)
方程参数A1,A2,A3,A4见表4中爪趾T4拟合公式参数。
提取爪趾生物曲线时,以爪趾T4的模型为基础,提取爪趾两侧(上/下)边缘线及内侧凸筋曲线,趾根部内侧截面线。将提取的生物曲线进行拟合,其拟合曲线R2值均大于0.96(见表4)。
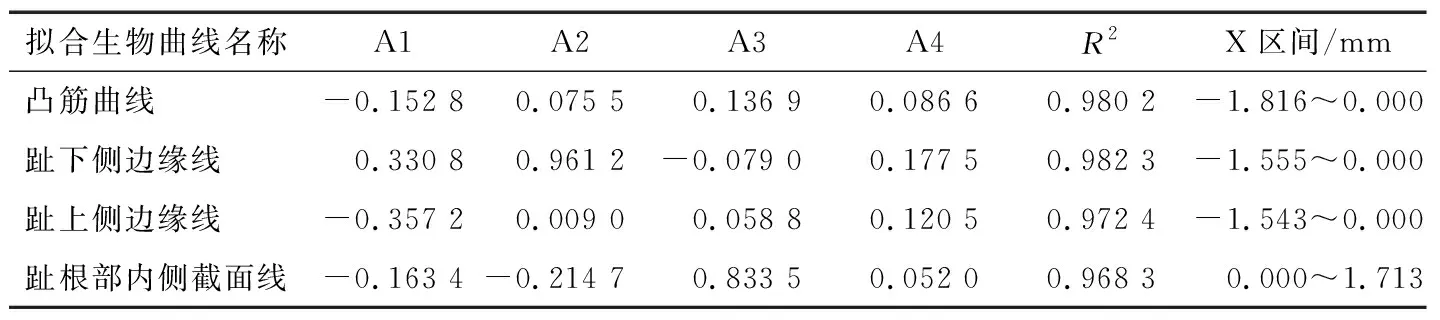
表4 爪趾T4拟合公式参数Table 4 Parameters of fitting formula of claw tooth T4
将拟合曲线分别应用于仿生耕糟刀耕犁和刀板的设计中。如图6所示,以爪趾的下边缘线拟合得到的曲线作为仿生耕糟刀的曲线ab,趾上边缘线为原型拟合后得到曲线ac,凸筋中线为原型拟合后得到曲线ad,曲线bc为爪趾根部内侧截面曲线拟合曲线。由爪趾的仿真结果分析可知,趾T4以23.7°角楔入土壤所实现的功能符合耕糟刀的设计目标,所以耕犁与水平面呈23.7°角。
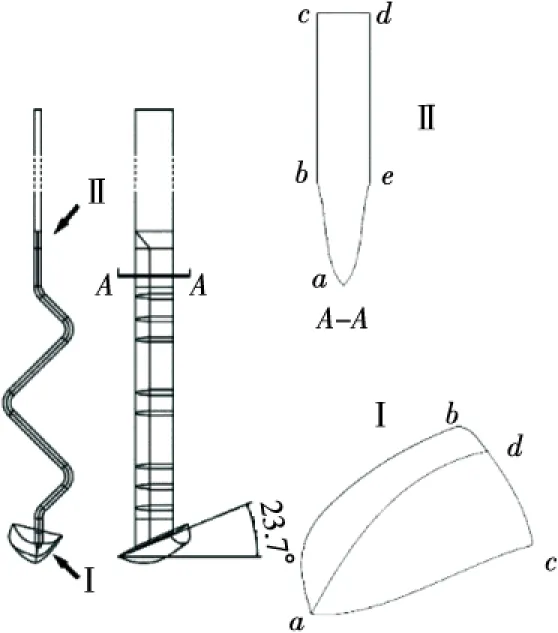
图6 仿生耕糟刀结构图示Figure 6 Structure of bionic raking knife
仿生刀板的主体形态与原型刀板保持一致,为蛇形刀板形态,弯曲位置呈90°角。仿生耕糟刀刀板截面中曲线ab、ae为爪趾凸筋曲线的拟合曲线。将仿生方案模型尺寸放大到与原型耕糟刀一致大小,完成仿生耕糟刀的设计过程。
5 仿生耕糟刀与原型耕糟刀对比试验
研究证实[13-17]仿真结果和平台试验结果具有相同的变化趋势,证明仿真结果在对比方案之间的性能差异方面具有参考性。
对仿生耕糟刀进行仿真试验,将仿真结果与原型耕糟刀的结果进行对比。仿生耕糟刀的仿真试验参数设置与原型耕糟刀仿真试验相同。从流场速度云图(图7)可以看出,仿生耕糟刀耕犁位置远离中心轴的耕犁周围流体速度最高,越靠近中心位置速度越低;刀板附近流体速度分布相反,靠近中心轴的刀板周围流体速度最高。
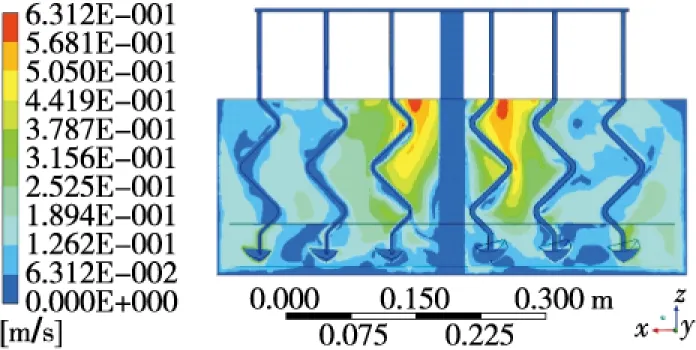
图7 仿生耕糟刀速度云图Figure 7 The cloud chart of velocity of bionic raking knife
从原型耕糟刀的耕糟速度云图[图2(a)]可以看出,流体速度分布不均匀,过滤槽中心轴靠近液面的流体速度较高,仿生耕糟刀的云图特征与原型方案相似,其中仿生方案的流体速度最大值低于原方案,仿生耕糟刀的刀板对糖化醪的搅动作用比原型方案小,流体流速较大区域均位于靠近中心轴的两个刀板,由表5可知,仿生方案产生的流体速度最大值比原型产品减小11.46%,更能保护已经形成的上层糟层;在耕糟刀耕犁下面的精滤层差别较大,结合速度矢量图特征(图8)可以看出仿生耕糟刀精滤层比原型产品更稳定,速度更小。
如图8所示,仿生耕糟刀对醪液流体区域作用后没有产生明显的湍流,符合过滤槽最理想流体特征。与原型耕糟刀相比较可以看出仿生耕犁对最底层的精滤层产生的向下速度小于原型耕犁,可以有效防止在耕糟过程中压实底层的精滤层。
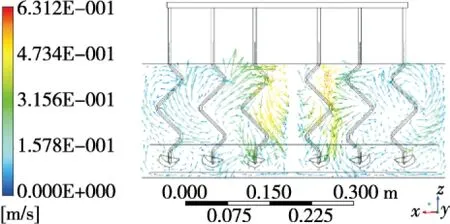
图8 仿生耕糟刀流体速度矢量图Figure 8 Fluid velocity vector chart of bionic raking knives
耕糟刀在旋转过程中直接对麦糟产生剪切应力,图9反映了仿生耕糟刀在降低剪切应力方面的优势,特别是耕犁部件位置。原型耕犁表面会产生较大的剪切应力[图2(c)],这会破坏麦芽颗粒和麦糟层的结构,导致过滤麦芽汁混浊的问题,仿生方案中剪切应力在耕糟刀上分布均匀,仅在耕犁的尾部出现较大的剪切应力。耕糟过程中麦糟与壁面之间会发生相对运动或有相对运动趋势,壁面产生剪切应力。理想条件下麦糟与壁面之间不发生相对运动,壁面剪切应力为0,所以壁面产生的剪切应力也是评判耕糟效果的一个标准,由表5计算出仿生方案比原型方案在壁面位置产生的剪切应力最大值低19.01%,仿生耕糟刀表面产生的剪切力降低了18.90%。

表5 仿生耕糟刀与原型耕糟刀仿真结果对比Table 5 Comparison of simulation results of bionic and prototype raking knife

图9 仿生耕糟刀剪切应力云图Figure 9 The cloud charts of wall shear of bionic raking knives
6 结论
(1) 通过对爪趾挖掘土壤过程的有限元动力学仿真分析,发现蝼蛄挖掘足爪趾T4楔入时土壤应力相对最小、土壤应变较小,符合耕糟刀的设计要求,所以选择爪趾T4作为耕糟刀仿生设计的生物原型。
(2) 拟合爪趾T4的主要生物曲线,将拟合曲线应用于仿生耕糟刀的设计,对仿生设计方案与原型方案分别做仿真分析,得到的仿真结果显示仿生耕糟刀对糖化醪液的搅动作用比原型耕糟刀更小,剪切应力较原型方案明显下降,更适宜耕糟操作。
