基于TRIZ的自动爬梯轮椅专利规避创新设计*
2020-12-24王秀红唐淑珍梁帅鹏孔祥芬韩光平
王秀红,唐淑珍,梁帅鹏,孔祥芬,赵 翔,韩光平
(1.郑州航空工业管理学院 管理工程学院,河南 郑州,450015;2.中国民航大学 航空工程学院,天津,300300;3.江西创海科技有限公司,江西 南昌,330100)
0 引 言
随着人口老龄化的加剧以及意外突发事件的增多,老人和残疾人等行走障碍人员在我国总人口中所占比例越来越大。在此背景下,研制具有自动爬楼梯功能轮椅,提高行走障碍人员出行方便性的需求越来越迫切。
通过对爬楼梯轮椅专利申请的所在国家或地区知识产权组织分布进行统计可知,在所有发明专利中,美国和德国无论在数量上和质量上都处于前列。我国一些公司和机构虽然也加大了对自动爬楼梯轮椅的研究,申请了多项专利,如履带式、行星轮式、轮腿式自动爬楼梯轮椅等,但这些专利产品普遍存在价格较高、质量较重、稳定及安全性较差、耐用性差等问题。章玮滨等[1]采用拉格朗日方程的行星轮组动态模型,设计了一种行星轮式爬楼梯轮椅。基于双曲柄爬升机构,李爽[2]设计了一种既可平地行驶又可完成爬楼动作的爬楼梯轮椅。徐俊翊等[3]开发了一种轮-履复合机构的新型载人爬楼梯履带车。此外,还有一些学者对自动爬楼梯轮椅具体单元,如控制系统[4]、安放机构[5]和轮辐[6]等进行了设计。但这些设计都是在原有产品基础上进行的改进,大多是概念设计,若要申请专利,是否侵害原有专利技术还有待研究。
目前,随着人口老龄化以及意外突发事件的原因,导致行走障碍人员无法正常行走的问题越来越突出,为解决这一问题,笔者将TRIZ/专利规避集成技术应用到自动爬楼梯轮椅的创新设计中。
1 专利规避/TRIZ集成创新设计
1.1 专利规避理论
国家统计局资料显示,近年来我国专利总申请量的一半以上为国外申请人,其中日本、美国、德国占据前3位[7]。发达国家在我国实行“专利圈地”趋势日益严重,利用其技术优势在国内外市场设置专利壁垒[8],使我国企业在创新发展方面受到限制,侵权事件时有发生,高额的赔偿金使我国企业受到重创。目前,迫切需要一种技术使我国企业在技术创新过程中将专利信息加以提取和利用以避免侵权事件的发生。专利规避是20世纪90年代源于美国的合法竞争行为,鼓励在研究知识产权库已存在专利的基础上,对某一具体对象或者专利群进行避开专利人的权利要求的设计活动[9]。早期国外专利规避研究集中于法理层面,专注于从侵权案例中归纳具体的规避原则和方法[10,11]。我国加入WTO后,专利侵权案件日益增多,学者们特别是法律界人士加大了对专利规避的研究,总结出了侵权判定“三步法”及规避诉讼策略[12,13]。但跨国公司的“专利圈地”和专利壁垒活动,使得从法律层面规避现有专利的保守防御策略越发困难,如何在现有专利基础上从技术层面实现突破创新是目前国内外学术界研究的热点[14-16]。
1.2 TRIZ理论
TRIZ即发明问题解决理论,是前苏联发明家根里奇-阿奇舒勒于1946年带领一批学者在研究了世界各国200万份高水平专利的基础上,提出的一套发明问题解决理论和方法[17]。从1956年阿奇舒勒发表了第一篇有关TRIZ的论文开始,发明家们开始对创新理论工具进行了完整的梳理,然而至20世纪80年代中后期仅封闭在前苏联范围。20世纪90年代随着TRIZ应用案例的出现,学术界才对此逐渐展开研究。进入21世纪以来,TRIZ进入加速发展的黄金阶段。TRIZ的整个理论体系为确定问题,建立问题模型,工具求解,分析是否达到理想解;若没有达到理想解,则循环分析。问题模型主要为功能模型、物质-场模型和冲突模型,借助效用知识库、76个标准解、技术矛盾对应的40个发明原理以及物理矛盾对应的4条分离原理、4种解题工具以解决问题,达到最终理想解。
1.3 专利规避/TRIZ集成创新设计模型
专利规避设计的实质就是通过对国家知识产权库已申请专利进行总结分析以确定规避对象,根据专利制度的侵权原则,掌握合法的规避路径对规避对象进行设计。TRIZ理论是在分析大量专利的基础提出的一套完整的创新理论体系,具有功能分析、裁剪、理想解等强大的分析和解决问题的工具方法。专利规避和TRIZ理论本身就有着密切的联系。将TRIZ理论应用于专利规避,可利用TRIZ理论的功能模型对专利技术进行问题分析,对不足功能、过剩功能及有害功能进行结合、替换、裁剪等进行功能变形,再利用TRIZ的发明原理、物质-场模型和标准解去解决功能模型变形后带来的技术问题。将专利规避和TRIZ有机集成,能使企业在不侵犯专利要求的基础上进行创新设计,是技术层面创新的主动专利规避设计。
TRIZ理论/专利规避的集成过程如图1所示。
TRIZ/专利规避集成设计最早是IKOVENKO博士[18]提出的。LIU Y M等[19]根据需求分析,提出了TRIZ理论和专利规避创新设计的过程模型。面向单一专利,周善明等[20]分析技术明确发明问题,利用多屏幕法进行了资源分析,应用TRIZ工具求解实现了专利规避,并成功应用于智能家居控制。石文豪等[21]利用物质-场模型简化了分析发明问题,利用冲突理论、标准解进行了专利规避,并成功应用在顶驱下管套装置中。在专利群规避方面,江屏等[22]通过技术进化与IPC聚类结合,通过技术成熟度预测,确定了专利规避目标,并将其应用于封隔器。穆秀秀等[23]对功能模型进行了分析,利用TRIZ理论的物质-场模型和冲突分析进行了规避设计,并以汽车发动机活塞销压销装置为例验证了其可行性。面向专利组合的规避研究,因缺乏专利组合及专利间的关系分析,应用起来具有一定的困难,目前还没有学者采用专利规避/TRIZ集成模型对爬楼梯轮椅进行设计的案例。
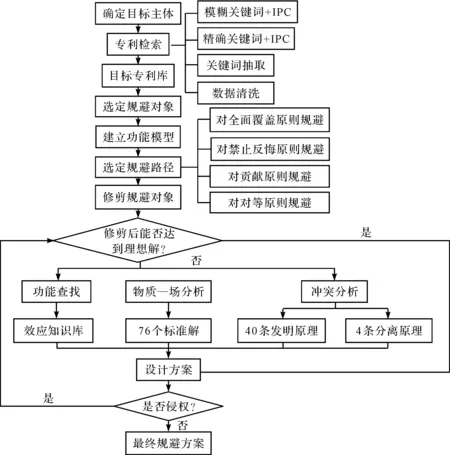
图1 TRIZ理论/专利规避的集成过程
2 基于TRIZ的自动爬梯轮椅专利规避设计
2.1 规避对象的确定
笔者借助SooPAT检索工具,以“自动上下楼梯&轮椅”为关键词进行专利检索,得到自动上下楼梯&轮椅专利分析报告。专利选取截止到2019年4月12日,共检索到相关专利74篇。其中,发明专利36项、实用新型专利28项、外观设计专利2项、发明授权8项。这些专利大多集中于2009-2018年;按大类统计,专利70.73%集中于卫生学;按小类统计,则专利集中于病人和残疾人相关项目。笔者取专利中发明专利为研究对象,通过筛选相关IPC,去除无效专利后,得到12份实审专利和6份有效专利。在18份可用专利中,剔除与主题相关度较小的专利,对技术主题进行分析,最后得到的是与所想要内容匹配度较高的IPC分类号中A61G5/06、B62B5/02、B61G5/02、B66B23/02、B60B19/00所代表的技术主题。
自动上下楼梯&轮椅IPC小组分类号如表1所示。
笔者根据小组分类号和相关度对有关专利进行筛选,在去除无效专利的基础上,将与相关度较高的5类IPC的专利内容进行了仔细阅读,对其余相关度不高的专利进行了大致浏览;在有权专利和实审专利中,重点对SooPAT数据库中的专利权利要求说明书和发明内容及图纸进行了研究,依次分析了与内容主题的契合度;对成本、研究难易程度、舒适度以及安全性等多方面因素进行综合考虑,最终确定专利《一种欠驱动自适应式爬楼梯轮椅》(CN 201410171664.4)[24]所保护的专利与所需求的技术主题契合度较高,即最终规避对象为专利号为CN 201410171664.4的专利,对比对象为专利号CN201110097167.0[25]和CN201410801565.X[26]的专利。
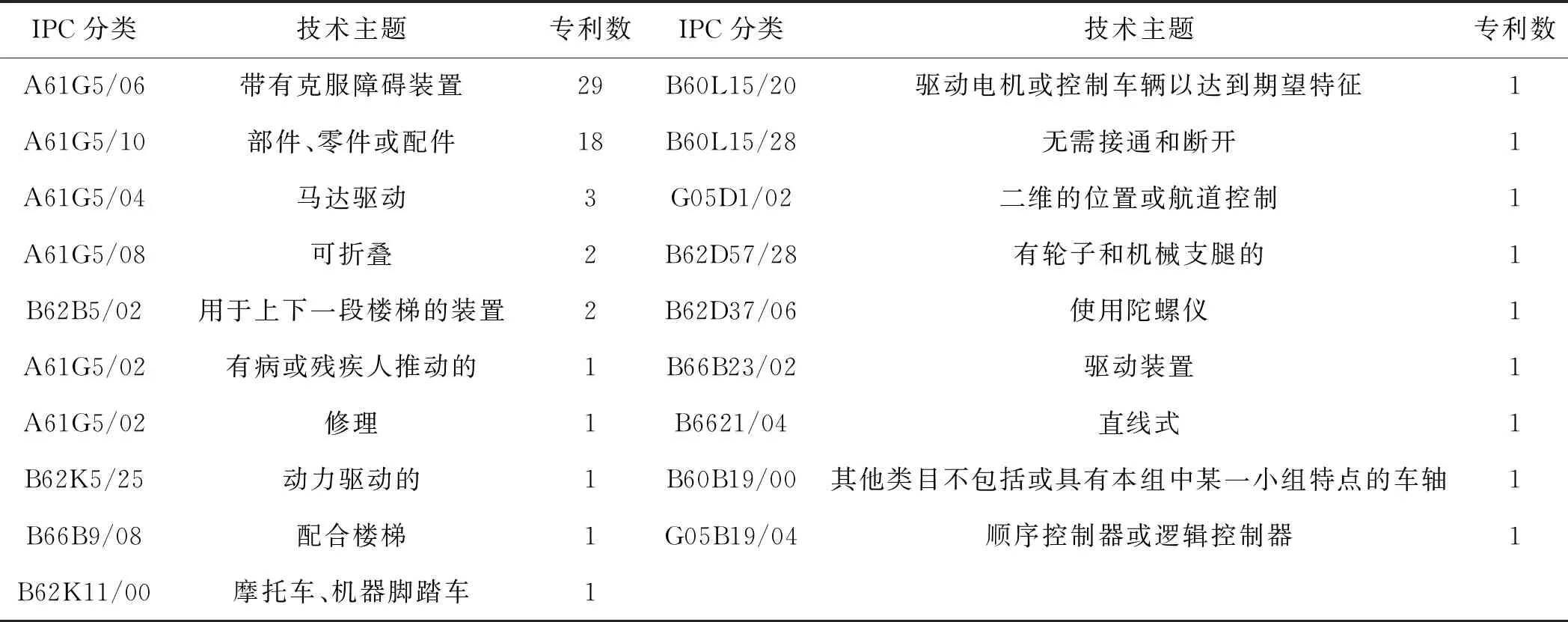
表1 自动上下楼梯&轮椅IPC小组分类号
2.2 专利信息的提取
笔者以专利号CN103932849A的专利为原型。该专利为一种欠驱动自适应式爬楼梯轮椅,专利主要包括29个主要部件。权利要求为椅架主体、电池、平衡机构、驱动机构和控制机构5部分。该专利的发明原理为利用星型欠驱动轮系,通过机械智能平稳越过道路上的障碍以及顺利地上下楼梯,能使行动不便的人独立地完成上下楼梯活动。该专利成功解决了行动不便的人在无直梯的情况下独自一人难以上下楼梯的问题,但同时也给他们带来了一些潜在的问题。例如,虽然该产品有平衡机构,仍对行动不便的人带来了一定的威胁;结构过于复杂,不利于售后维修等一系列服务。
在一定的制度约束条件下,笔者根据专利权利说明书、图纸说明书的具体部件组成以及权利人的具体解释,建立了基于专利3大层次信息的功能树,如图2所示。
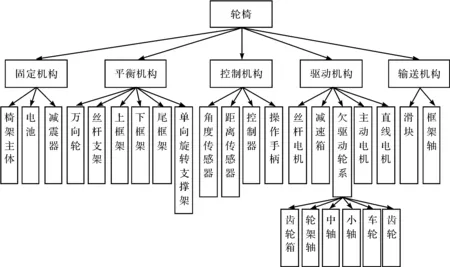
图2 基于功能树的专利3大层次信息提取图
由图2可知:规避对象欠驱动自适应式爬楼梯轮椅包含:固定机构、平衡机构、驱动机构、控制机构以及输送机构5部分。对部件按照功能进行分解,可得到不同的系统元件和超系统元件。有些系统元件按照功能应该属于不同的部件,但结构过于复杂,仅按照主要功能对部件进行分解,如欠驱动轮系又分为齿轮箱、轮架轴、中轴、小轴、车轮、齿轮6部分。
2.3 规避设计
2.3.1 功能分析
笔者根据专利权利说明书将系统划分为系统和超系统。29个系统元件中,2个超系统元件分别为2电池和4车轮,其它属于系统元件,车轮属于制品。
所有元件用1至29序号按顺序列出,用相互矩阵表达元件间相互作用关系,如表2所示。
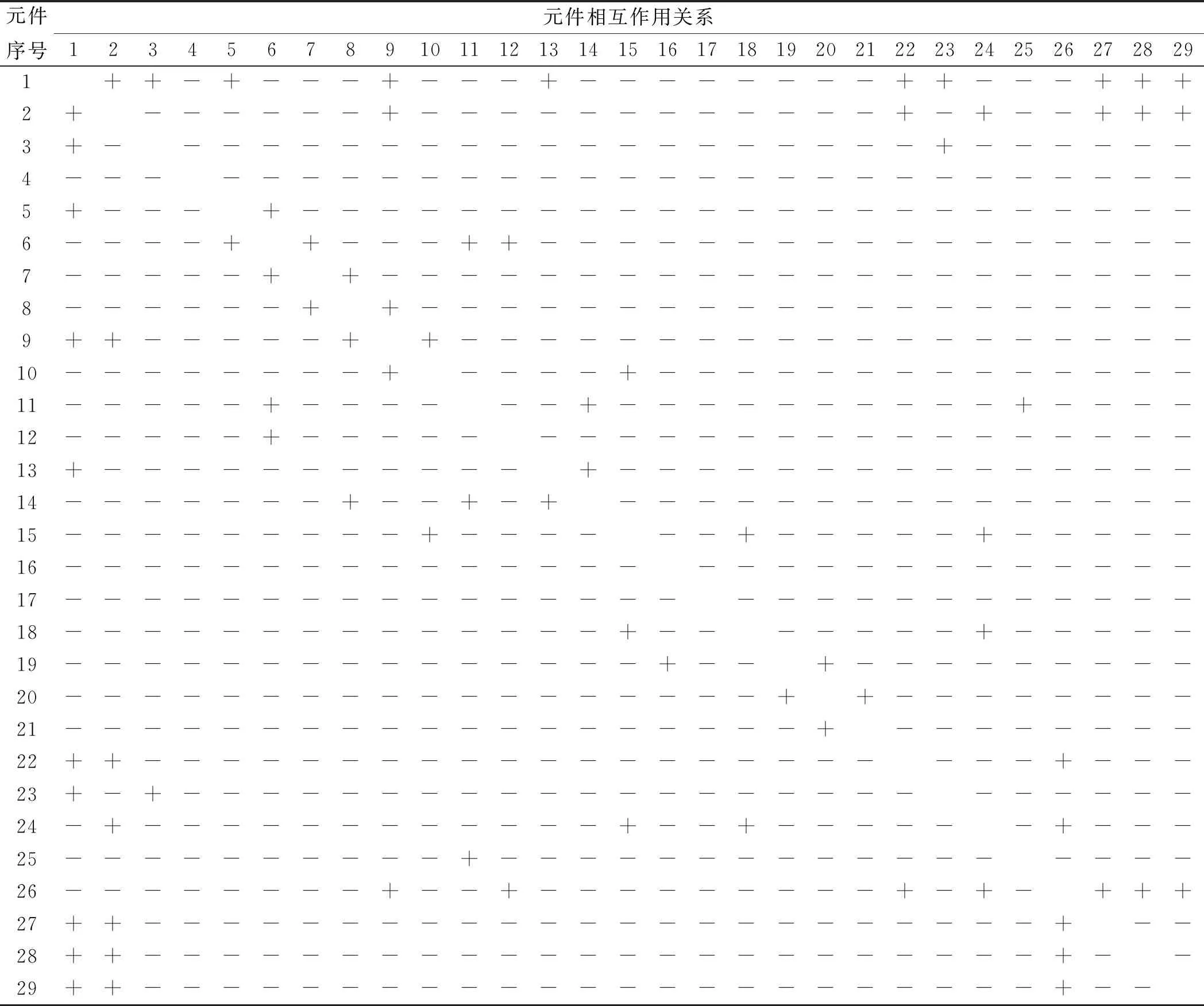
表2 欠驱动自适应式轮椅相互作用矩阵
在表2中,“+”表示两者之间有相互作用,“-”表示两者之间没有相互作用。如1椅架主体和3减震器之间有相互作用,则矩阵第1行第3列为“+”;同时,元素之间的关系是相互的,所以矩阵以对角线相互对称。
2.3.2 功能模型的建立
根据基于功能树的专利层次信息,笔者提取和欠驱动自适应式轮椅元件间的相互作用,并根据权利要求说明书,分析系统元件的主要功能要求,确定元件间关系中的标准作用,并用不同线形区别不足作用、过剩作用和有害作用。
笔者根据元件的不同作用建立针对产品权利要求的功能模型,并对部件层进行规避区域划分,如图3所示。
由图3可知:(1)功能模型划分为4个区域:传动机构区域、控制机构区域、驱动机构区域、平衡机构区域;区域之间用虚线框表示;(2)存在3个不足作用和2个有害作用。
2.3.3 功能模型的修剪
裁剪是TRIZ中的改进系统,是提高系统理想化程度的重要实现工具。裁剪的目的为降低成本,去除对系统有负面影响的功能,包括不足功能、过剩功能和有害功能,降低复杂性。根据全面覆盖、贡献、对等和禁止反悔4项裁剪规则进行规避,规避方法可归为4类:裁剪法、替换法、组合法和分解法。此处主要对图3的功能模型中有害作用进行裁剪替换,对不足作用进行替换添加,分析现有的问题及技术,综合期望解对功能模型进行修剪。
修剪后功能模型图如图4所示。

图3 欠驱动自适应式轮椅功能模型图T1-传动机构;T2-控制机构;T3-驱动机构;T4-平衡机构

图4 修剪后功能模型图
由图4可知:主要为丝杠支架构成的平衡机构会产生颠簸感的有害作用,对丝杠支架、丝杠电机、上框架、下框架、尾框架和滑块进行裁剪,裁剪后出现一个新的问题,即如何控制平地和爬梯的平衡;车轮之间的作用不能使爬梯时平稳进行,为不足作用。笔者以平稳性为理想解,综合现有技术,添加履带升降装置,用一种齿轮-链条综合控制传动的可活动轮架轴,替换由齿轮直接控制的轮架轴。
3 自动爬梯轮椅的创新设计
3.1 修剪后功能模型分析
修剪后的功能模型仍分为3个主要模块:控制机构、传动机构和平衡机构;修剪后去掉了一些有害功能,补足了不足功能,删去了过剩功能。对比修剪前后的功能模型可知,整个上下楼梯轮椅的结构更为简单明了,功能更加清晰。分析功能模型可知,修剪后产生两对物理矛盾:(1)希望车轮有一定的距离可以保持整个车身的稳定,又希望车轮之间的距离固定可以成功地实现上下楼这一功能;(2)希望履带装置足够小,能够减轻整个车身的重量以方便搬运,又希望履带装置足够大,能够充分与阶梯相接触,使车身拥有足够的稳定性。
3.2 修剪后问题的解决
物理矛盾通常采用分离的方法进行解决。分离原理主要有4类:空间分离、时间分离、条件分离、整体与局部分离。针对每类分离原理,TRIZ理论中都给出了对应的发明原理,如表3所示。

表3 分离原理与发明原理的关系
3.3 专利规避设计方案
根据理想解分析矛盾,车轮之间距离远近的矛盾和履带装置大小的矛盾均可应用空间分离原理进行解决。空间分离原理即将矛盾双方在不同空间上分离开,以获得问题的解决或降低问题的难度。笔者根据分离原理对应的发明原理,主要对车轮传动机构、履带装置和轮椅主体结构3部分进行创新设计。
(1)笔者根据空间分离对应的发明原理1分离、原理17多维对传动模块进行创新改善,车轮的结构仍为行星式。具体的车轮运动及转换模式原理如图5所示。

图5 车轮运动及转换模式原理
由图5可知:车轮由链条传动,其中小轴和大轴分别连接车轮,小齿轮、大齿轮和轴架,轮架轴连接轮椅自身的固定结构,使车轮和车身能够保持稳定,车轮的运动通过两两连接的齿轮转动带动链条进行;由控制器控制行走模式,前进或后退;轴的两端是套叠起来的,具有伸缩性,平地或爬坡时为自然状态,使轮椅能够正常行驶。
由图5还可知:当接收到转换需求时,套叠的轴伸展开使其正常转换。当选择平地行走模式时,控制器控制上车轮连接的轴向下移动,前后车轮连接的轴分别向前后移动,使其在平地行走时能更加稳定。当选择爬梯模式时,控制器控制连接上车轮的轴向上移动,同时前后车轮连接的轴向里收缩为等边三角形。由行星式车轮爬上或爬下第一个和最后一个阶梯然后转换成履带模式,由履带传动进行楼梯间的行走。转换过程中与车轮连接的轴均为沿直线前后变换,因此可以确保舒适性。
(2)笔者根据发明原理7套叠、原理24中介对传动模块的履带装置进行创新设计,在轮椅主体与履带之间增加一个自动升降装置,做成折叠式以节省空间、减轻重量;使升降装置上表面与椅身固定支架固定连接;下表面以滚轴控制升降装置,由一控制器控制履带装置上升或下降。当选择平地行走模式时履带装置为紧收起来的装置固定在椅架下方,当选择爬梯模式时控制器控制滚轴滚动使履带装置开始下降。
根据原理2抽取、原理17多维对平衡装置进行创新,轮椅主体结构如图6所示。
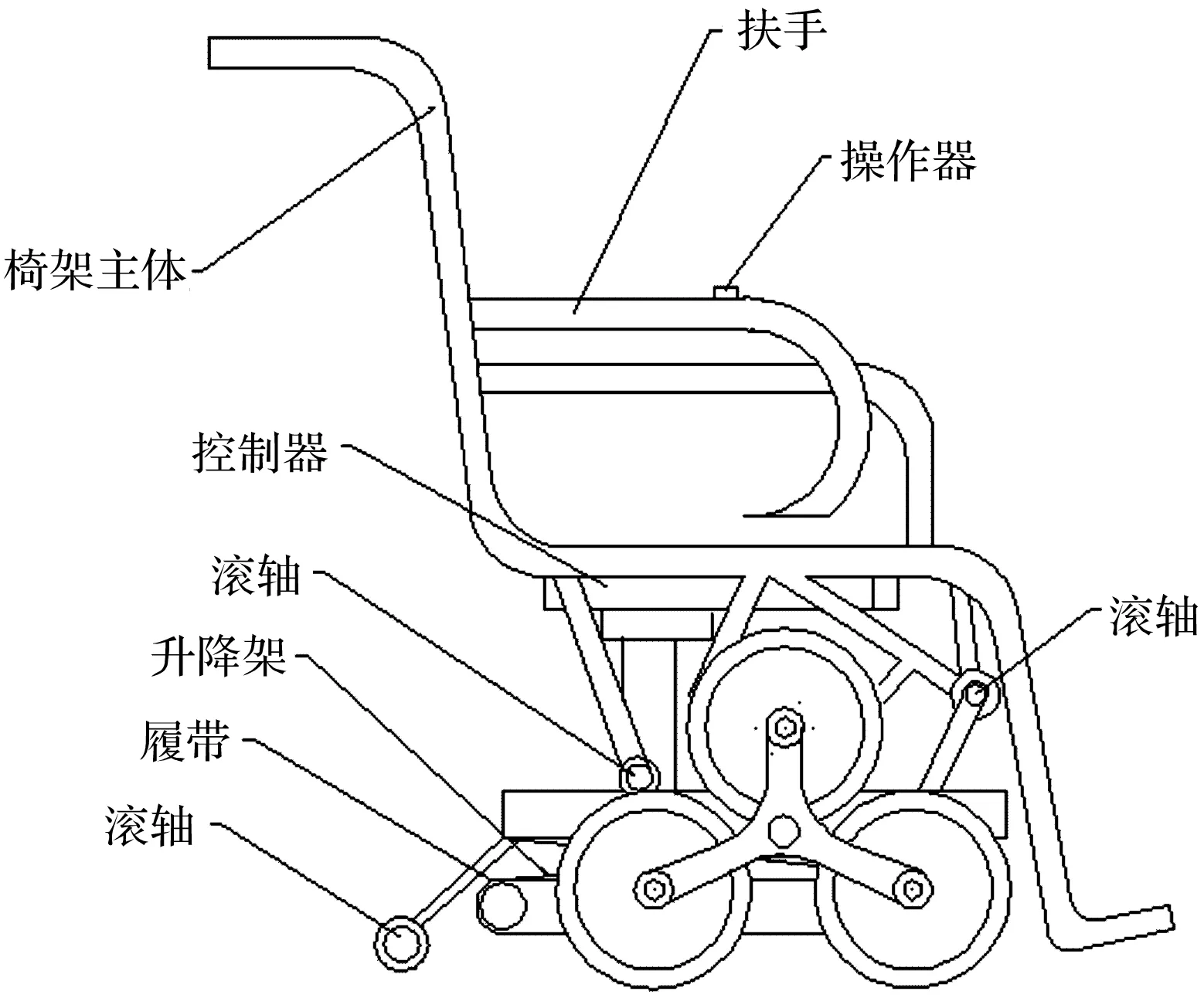
图6 轮椅主体结构
在图6中,椅身具有固定支架,用滚轴连接固定支架与支架升降装置上表面的固定立管;靠近椅背下方一固定支架也通过滚轴与升降装置相连,当选择平地行走或上下楼模式时,角度传感器、压力传感器与控制器与控制模块相连接,当控制模块发出重心不稳的信号时,由控制器自动控制滚轴,使椅身在一定范围内进行转动以稳定重心,椅身固定支架处通过滚轴、滚珠与一可伸缩的万向轮连接,当重心不稳时配合椅身的前后转动共同控制重心以保持稳定。
4 仿真实验及结果分析
当选择平地行走模式时,车轮轮轴开始自动移位,使前后两轮之间的距离适当增大,在遇到半坡时稳定性增加,当遇到障碍物或危险物的时候,距离传感器将信号传递给控制模块,控制模块控制停止车身;当选择爬梯模式时,行星式车轮开始转动,使其成功爬上第一个楼梯,爬行过程中控制器控制升降台使履带装置开始下降,楼梯间的传动由履带传动进行配合,直至到达最后一阶楼梯,控制器控制升降台使履带装置上升,恢复行走模式。
在爬梯过程中,先由压力传感器发送给控制器车身的重心信号,由控制器控制滚轴等进行中心调节,以使其保持平衡。无论选择平地行走模式或爬梯模式,均由减速器、离合器、角度传感器、距离传感器、压力传感器、变速箱、操作手杆同时进行控制,以保持安全和相对舒适度;利用计算机智能控制重心,使平衡性得以稳定。
由于轮椅在攀爬第一节楼梯时,轮椅所有重量都集中在后轮,为保障重点部件的强度要求,笔者首先应用有限元模型分析对后轮进行应力分析,如图7所示。
此处车轮轮毂材料选用合金钢。笔者首先对车轮结构图进行网格划分,设整个车身最大重量为200 kg,从图7可知,所受最大应力在屈服应力以内,因此应力分布合理。
其次,为保障包括车轴在内的爬楼梯轮椅整体的强度,笔者对轮椅在平地状态和爬楼梯状态时进行整体应力分析和变形位移分析。主要支撑结构均为刚性连接,假设用户体重100 kg左右,则椅背所承受的压力约为1 000 N。不同状态下应力分析及变形位移分析如图8所示。
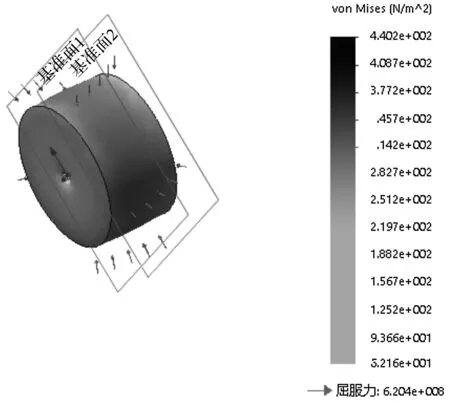
图7 后轮的应力分布
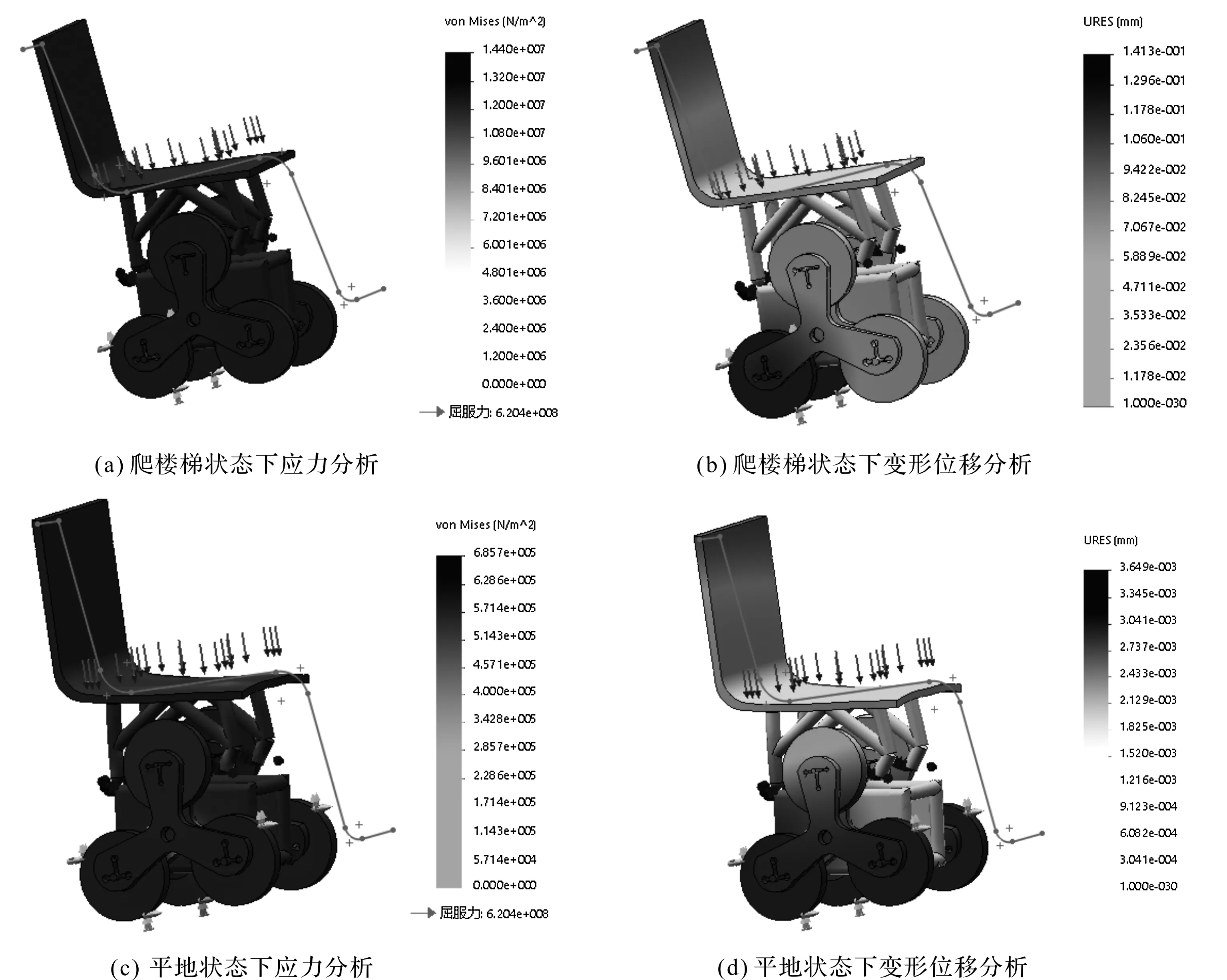
图8 不同状态下应力及变形位移分析
由图8可知:在爬楼梯状态下,轮椅整体所受最大应力在屈服应力以内,结构最大位移量小,有轻微变形,可忽略不计;在平地状态下,轮椅整体所受最大应力也均在屈服应力以内,且平地整体结构最大位移量也很小。
由此可以验证该轮椅创新设计是可行的。
5 结束语
由于知识产权保护已成为社会共识,专利壁垒成为企业创新面临的紧迫问题。TRIZ/专利规避集成设计为企业创新提供了新的方法和思路。
随着人口老龄化的加剧、意外突发事件的增多,自动爬楼梯轮椅满足了日益增多的残障人员的需求。笔者在分析目前自动爬楼梯轮椅专利信息的基础上,通过IPC分类及相关性分析,确定了规避对象,利用TRIZ的功能模型对专利信息进行了分析提取,对现有功能模型进行了修剪;对修剪后的功能模型进行了分析,仍存在冲突则再利用TRIZ中的发明原理进行了创新设计。
笔者设计了一种行星-履带结合的自动爬梯轮椅,使轮椅结构更为清晰简单、稳定安全。但目前的产品使用过程中,还需要使用者或者陪护人员的实时操作,无法满足缺少陪护和无操作行为能力的人员的出行要求。因此,如何实现自动爬楼梯轮椅的远程、安全、实时操作,这是下一步研究的重点。
