一种基于潜标基阵的信号接力定位方法*
2020-12-23
(91388部队 湛江 524022)
1 引言
目前,靶场用于水下目标定位的长基线定位系统有两种,分别是浮标式和潜标式。浮标式水声定位系统的测量浮标均锚系于海底,会对水下目标的安全机动及拖曳式声纳的安全使用造成影响;潜标式系统由布放于海底的潜标基阵和布放于测量区边缘的监测浮标共同完成水下目标的定位任务,对潜艇及拖曳声纳的安全机动影响最小,但受监测浮标的水声作用距离限制,有效监测区域较小,难以满足大范围监测保障需求[1~10]。
近几年,水声对抗试验的范围越来越大,为防止对舰艇战术机动和安全产生影响,监测浮标只能布放在试验区域之外,而单个浮标水声监测距离只有几公里[1~10],制约了水下测控范围的拓展。本文提出了一种中继潜标信号转接方法,扩大监测定位区域,从而满足大范围定位试验需要。
2 水下定位模型
长基线定位系统的工作原理如图1所示,海底布设N个潜标基阵,水下目标上装有水声收发机和合作声信标,在同步钟触发下周期性发射询问声信号,各潜标阵元接收后发射相应频率的应答声信号,监测浮标接收各应答声信号,测定“目标—潜标—监测浮标”之间的声传播时延。监测浮标的位置可由其自身的DGPS确定,各潜标的位置在测量基阵布放完毕后校准确定。接收时延乘以声速减去“潜标—监测浮标”的距离即可得到“目标—潜标”的距离,然后采用球面交汇方程组即可解算出目标所处的位置,逐点定位解算,得到目标的运动轨迹[6~12]。
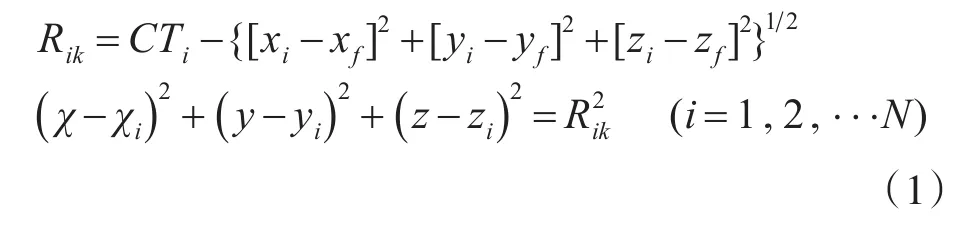
式中:(xi,yi,z)i是校准后的潜标阵元i的空间位置;(xf,yf,z)f是监测浮标的 DGPS位置;Rik是修正后的“目标—潜标”的距离。
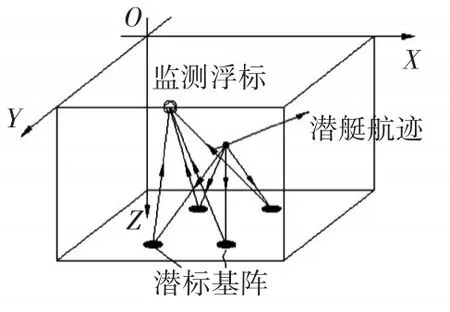
图1 水下定位工作原理示意图
3 信号接力定位方法
3.1 信号接力定位模型
海底布设N个潜标基阵,监测浮标布放于监测区边缘,当潜标与监测浮标的距离大于监测浮标的最大接收距离时,会产生监测盲区,考虑到位于监测盲区的潜标发射的声信号虽然无法被监测浮标收到,但其邻近的潜标能正常接收。因此,对于处在监测盲区的潜标,如图2所示,其声学信号由相邻的潜标接收后转发,监测浮标通过接收中继潜标转发的声学信号实现对远距离盲区潜标的信号监测。

图2 信号接力示意图
当监测浮标接收到中继潜标回复公共询问声信号的应答声信号时,仍可根据如式(2)中第一个距离修正式,接收时延Th乘以声速C减去“潜标h—监测浮标f”的距离即可得到“目标—潜标h”的距离Rhk,从而确定球面方程;当监测浮标接收到中继潜标j回复对应盲区潜标m的应答声信号时,即可测定“目标—盲区潜标m—中继潜标h—监测浮标f”之间的声传播时延Tmj,如式(2)中第二个距离修正式,接收时延Tmj乘以声速C减去“盲区潜标m—中继潜标j”以及“中继潜标j—监测浮标f”的距离即可得到“目标—盲区潜标m”的距离Rmjk,从而确定球面方程,按照球面交汇方程组解算定位。

3.2 中继潜标信号处理板改造
现有的潜标信号处理板采用了单通道信号检测及应答工作模式,检测固定频率的询问信号,当检测到有效信号后即回复设定好的特定频率信号,也即是单询问单应答功能。为了实现信号转接,首先要对中继潜标的信号处理板进行升级改造,在原有的单通道输入输出基础上再增加一路输入输出通道,使其具有双询问双应答功能。当换能器信号进入信号处理板后,分两路并行进行信号检测,其中一路检测公共询问信号并用第一应答频率响应,另外一路用于检测特定的盲区潜标的应答声信号,并用第二应答频率响应,程序框图如图3所示。这样,中继潜标除了原功能—应答公共询问频率声信号外,还有一个信号接力功能—以第二应答频率应答对应盲区潜标的应答声信号。
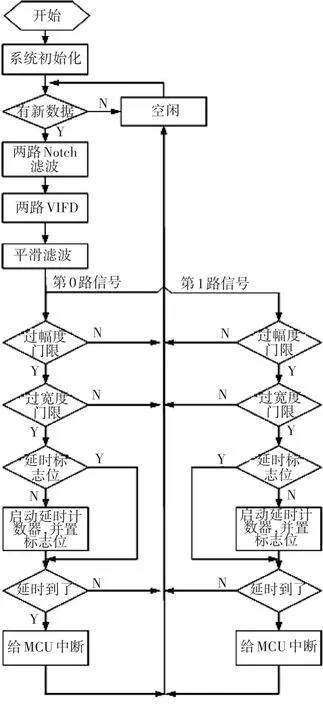
图3 双询问双应答功能程序框图
4 仿真分析
综合实际应用中可能对定位精度造成影响的声速测量误差、测时误差、阵元误差和GPS误差四种因素,对传统定位方式和中继潜标信号转接方法进行精度的仿真分析。设定测阵误差为5m,DGPS定位误差为1 m,分别对测时误差为1ms和2ms,声速误差为3m/s和5m/s的情况做数据统计分析,可以看出,中继潜标信号转接方法的测量精度与传统定位精度相当,各误差对定位精度影响的变化趋势呈现线性关系。由此可见,本方法能够保障定位精度基本不受影响的前提下,将定位测量的范围进一步扩大。
5 试验结果分析
如图4所示,在海底布放6个潜标,监测区边沿布放1个监测浮标,测量船位于监测区一角,另外一艘试验舰船模拟水下目标在阵内航行。使用现有长基线潜艇水下定位系统,存在监测盲区(图4中的网格状部分),当模拟目标航行在该区域时,监测浮标接收不到相应潜标的应答声信号,因而无法对其进行定位。

图4 海上验证试验态势图
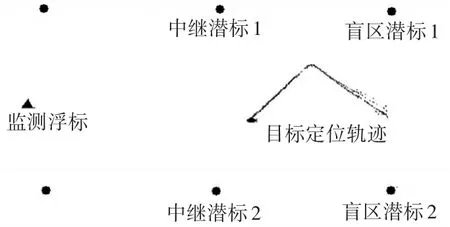
图5 试验结果图
采用信号接力定位方法,将中间两个潜标设置双询问双应答功能,分别作为两个盲区潜标的中继潜标,每个中继潜标除响应目标公共询问信号外,还能响应相应盲区潜标的应答声信号。试验定位结果如图5,可见当目标在阵中时定位效果较好,在右侧靠近潜标基阵边缘时,定位轨迹出现分叉现象,原因一是交汇角度不好导致定位误差增大,二是双询问双应答功能导致使用信号频点数成倍增加,从而增大了信号通道串漏的可能性。
6 结语
仿真分析及试验验证结果表明,本文提出的中继潜标信号转接方法,只需对潜标接收发射程序和主控软件解算模块进行少量改造,即可增大其测量范围,满足大范围水声对抗演练的需要,其定位精度与原系统定位精度相当。实际应用中,为了扩大定位范围使用的潜标较多,由于试验分配的信号频点的限制,需要继续研究解决信号通道串漏的问题。
