一种基于SURF特征点匹配的港口影像海陆分离方法*
2020-12-23罗兴潮黄文骞李加群林位衡
罗兴潮 黄文骞 李加群 林位衡
(1.92556部队 舟山 316009)(2.海军大连舰艇学院军事海洋与测绘系 大连 116013)
1 引言
随着遥感技术的飞速发展,利用卫星遥感图像检测海洋目标、监视海洋动态、服务海事救援等方面越来越受到人们的关注。其中,近岸港口是海洋遥感检测的重要区域,但影像中陆地区域存在大量干扰,影响港口的检测工作。如何高效、准确地完成高分辨率光学港口影像的海陆分离,是近年来近海遥感领域的一个重要课题。
海陆分离方法可以分为基于图像特征的海陆分离法和基于先验信息的海陆分离法两大类,基于图像特征的海陆分离方法精度较低,无法满足高分辨影像港口检测的要求。基于先验信息的海陆分离方法,是一种借助现有的海岸线、港口图等先验信息,利用图像匹配来实现海陆分离的方法。
图像匹配方法可以分为三类:灰度信息的模板匹配、基于对象关系的匹配、基于特征提取的匹配。灰度信息的模板匹配算法是通过滑窗的方法获取待匹配图像的灰度信息,与已知模板进行相关性分析完成图像匹配;基于对象关系的匹配算法是近年在人工智能领域提出的概念,基本思路是通过建立对象与网络进行匹配,但构建网络与对象关系的难度较大,目前还未取得突破性进展;基于特征提取的匹配,是通过特征提取与分析完成图像间的匹配,主要特征有点特征、线(边缘)特征、面(区域)特征。
由于灰度信息的模板匹配与基于对象关系的匹配并不适用于基于先验信息的海陆分离;而边缘特征与区域特征的提取与匹配计算复杂度较高且不稳定,本文提出了一种基于特征点匹配的海陆分离算法。
2 算法流程
基于特征点匹配的海陆分离方法,基本思路是先通过匹配地理坐标,从先验影像库中选择先验模板,再通过与模板的配准完成精细海陆分离,具体流程如下。

图1 基于特征点匹配的海陆分离方法流程图
Step1.建立先验影像库,收集国内外各大港口影像,其中每组影像模板包括,匹配影像(灰度影像或多波段影像)、掩膜影像(人工标绘制作的海陆二值影像);
Step2.读取需要海陆分离的影像,完成影像预处理,并通过坐标匹配完成模板选择;
Step3.提取输入影像与匹配影像的特征点,并保存每个点的特征值;
Step4.匹配两幅影像的的特征点,并通过两两配对的特征点,求出两幅影像间的映射关系;
Step5.通过求得的映射关系,完成掩膜影像的配准,并对输入影像进行掩膜处理,完成海陆分离。
3 影像预处理与坐标匹配
影像预处理的主要工作是去噪,在高分辨率可见光遥感影像中的噪声,主要为椒盐噪声与高斯噪声,可以通过中值滤波器与维纳滤波器去除,如图2。

图2 影像去噪示例
影像完成预处理后,通过读取坐标范围,在模板库中匹配相应区域的先验影像。由于不同源的遥感影像定位的经纬度坐标存在误差,先验影像无法直接进行掩膜,需要通过特征点的提取与匹配来完成影像的高精度配准。
4 特征点的提取与匹配
特征点的提取与匹配是基于特征点匹配的海陆分离方法的关键一步,它关系到影像配准的精度与整体算法的效率,需要平衡好算法精度与复杂度之间的关系。本文使用SURF算法进行特征点的提取与匹配。SURF(Speeded Up Robust Features)算法[1~4]由 Wang与 Bay等于 2006 年提出,在保留SIFT[5~9]算法优良的尺度、光照、旋转不变性的基础上,改进了特征点的提取和描述方式,提高了运行速度。SURF算法主要由四个步骤组成:一是构造Hessian矩阵及尺度空间;二是搜索定位特征点;三是赋予特征点方向值;四是生成特征点描述子。
由SURF算法提取出的每一个特征点对应的特征描述子是一个64维的特征向量。匹配特征点,就是将特征向量的欧氏距离最近的两个特征点关联起来,为了提高匹配的精度,需要剔除最近邻欧氏距离Dismin与次近邻欧氏距离Dissec的比值大于阈值T的点,即每组匹配的特征点需要满足下式:

图3为阈值T=0.5的SURF特征点匹配示例。

图3 阈值T=0.5的SURF特征点匹配示例
5 基于RANSAC的特征点筛选与影像配准
完成特征点的匹配后,需要从各组匹配点中解算出影像的变换矩阵,以此完成影像配准。但通过匹配的特征点中还存在着许多的误匹配点,会使变换矩阵产生偏差,因此需要先将其剔除。本文采用RANSAC 算法[10~13]来进行匹配点筛选并计算出影像变换矩阵。
RANSAC(Random Sample Consensus)算法由Fischler和Bolles于1981年提出,核心在于两个点集的配准过程,表示如下:

其中,pt与ps为一组对应点,R与T为变换矩阵。
RANSAC算法的基本思路是:将点集分为“模内点集”与“模外点集”,“模内点集”符合数学模型、“模外点集”不符合数学模型。通过一部分“模内点集”迭代估计数学模型的参数,得到一个包含最多点集的最优数学模型。
基于RANSAC算法的特征点筛选流程如下:
Step1:在特征点集中随机选择4组对应点,并根据这些对应点计算出变换矩阵R。
Step2:根据变换矩阵R与误差函数计算出满足当前变换矩阵的特征点子集S。
Step3:根据当前特征点子集S元素个数判断是否为最优集。
Step4:计算当前的变换矩阵下的特征点集错误概率P,重复Step1~3,直至错误概率小于设置的最小错误率,得到最优变换矩阵R*。
通过迭代得出的最优的变换矩阵R*,便可以完成影像的配准。由于RANSAC算法具有不确定性,需要增加迭代次数来提高配准的精度,特别是在处理不同尺度、光照、形变等情况下的多源遥感影像时。
6 掩膜
图像掩膜指将图像中与需求无关的区域用选定的挡板模型遮掩起来,主要用于提取感兴趣区,屏蔽干扰等。
实现掩膜需要完成三个步骤:制作掩膜、配准掩膜与覆盖影像。其中,制作掩膜是建立先验影像库的主要工作之一,需要人工裁定影像库中近岸港口数据的海陆区域,并其转换为二值图像。该二值影像便是掩膜处理中的挡板,使用变换矩阵对二值影像进行配准后,将其覆盖在输入影像上,便完成了海陆分离。
7 实验与分析
7.1 运行环境与评价指标
为了测试处理高分辨率港口影像海陆分离时各方法的性能,本文做了四种方法的对比实验:Otsu算法、改进的Otsu海陆分离方法、基于SIFT特征点匹配的海陆分离方法、基于SURF特征点匹配的海陆分离方法。运行环境如表1所示。
表1 运行环境
为了客观分析与对比各方法的海陆分离效果,本文设置了两个评价指标:耗时T与分割精度P,分割精度P的定义为

其中,Sr为精确分割的海洋区域,St实验分割的海洋区域。
7.2 实验数据
实验数据来源“Google Earth”,先验数据为1024×1024的匹配影像与掩膜影像,匹配影像的分辨率约为2m,待海陆分离数据为1536×1536的A影像与2047×2047的B影像,分辨率约为1m。匹配影像与A、B影像具有不同尺度,虽然匹配影像尺寸大小不如待分离影像,但实际覆盖区域相同或是更大,如图4。
7.3 实验结果与分析
A、B影像的海陆分离的结果如图5~6及表1~2,实验表明,Otsu算法精度最低,海陆分离的效果最差,无法完整分割海域与陆地;改进的Otsu海陆分离方法虽然有效地去除了海浪噪声、降低了陆地建筑干扰,但无法精准分割出港口轮廓,容易混淆靠港舰船与突出码头;而后两种基于特征点匹配的海陆分离方法分割效果都相当好,能够精准地将码头与海域分割开来。在运行速度方面,基于SURF特征点匹配的海陆分离方法快于基于SIFT特征点匹配的海陆分离方法。参考分割精度与耗时两个指标,并结合实验结果影像的分割效果综合评价,基于SURF特征点匹配的海陆分离方法在四种方法中表现最好。

图4 实验数据

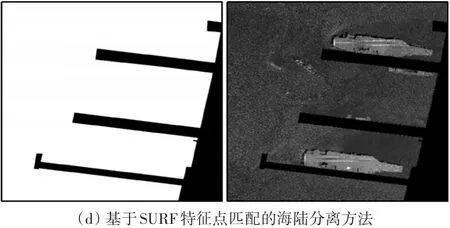
图5 A影像的海陆分离结果
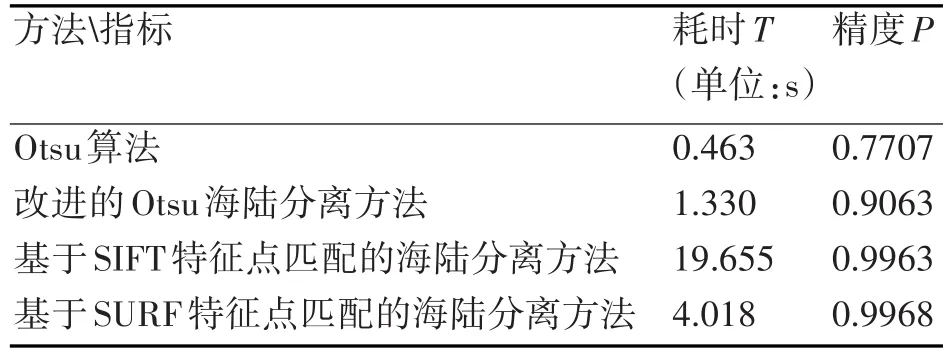
表2 A影像的海陆分离性能比较
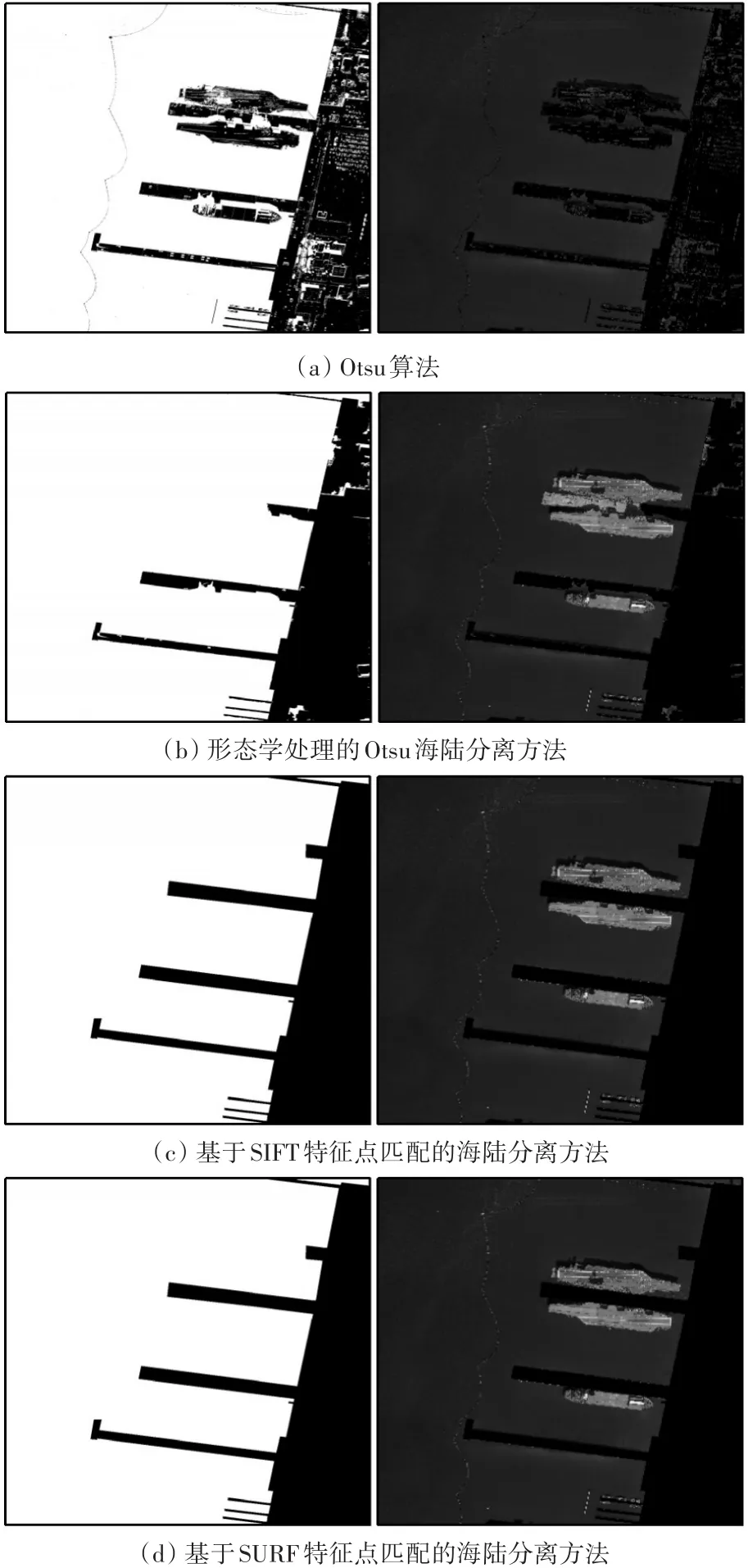
图6 B影像的海陆分离结果
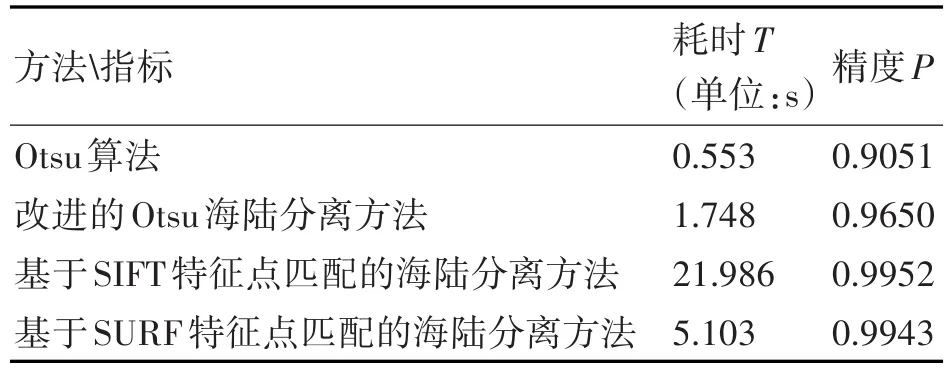
表3 B影像的海陆分离性能比较
8 结语
本文提出了一种基于SURF特征点匹配的高分辨率光学港口影像海陆分离方法,先通过坐标匹配找到相应区域的先验影像;再通过SURF算法提取特征点,并基于欧氏距离进行匹配;然后使用RANSAC算法完成特征点的筛选与影像匹配;最后通过配准的掩膜影像实现海陆分离。实验表明,该方法具有较高的精度与计算效率。
