经皮椎间孔镜髓核摘除术后椎间盘生物力学改变的有限元分析*
2020-12-21段星星李宇卫沈晓峰张志刚李红卫
段星星,李宇卫,沈晓峰,张志刚,李红卫
(南京中医药大学附属苏州市中医医院 骨伤科,江苏 苏州215009)
腰椎间盘突出症发病率较高,传统手术治疗需行椎板开窗、椎板切除腰椎间盘摘除术。随着外科精准化、手术微创化理念的发展及相应医疗技术、器械的进步,经皮椎间孔镜技术(percutaneous transforaminal endoscopic discectomy,PTED)的应用越来越广泛。与传统开放式手术相比,PTED 有创伤小、恢复快、费用低且相应并发症少的优势[1-2],得到了很多脊柱医生的青睐。PTED 流行的同时,医生还需要关注与该种术式密切相关的一些问题,如:术中椎间盘应去除多少、术后残余椎间盘是否导致腰椎间盘突出症复发及椎间盘退变等,而术中椎间盘去除多少与术后腰椎间盘应力的改变密切相关,但目前针对椎间盘部分切除后椎间盘应力改变的研究较少,尤其是未对不同位置及大小的椎间盘切除进行比较分析,对腰椎退变、失稳带来的影响没有系统评价,医生难以在手术中评估切除椎间盘对术后椎间盘退变带来的影响。有限元法造模成本低、时间短、可重复性高,目前受到了较多的关注[3]。其可以对模型施加任意载荷并进行各个方向的活动,能模拟人体的各种状态,以测得不同状态下的力学变化情况。有限元法在模拟PTED术后椎间盘的形态及应力改变方面具有很大优势。
本研究拟使用目前较为成熟的有限元分析方法,建立L4-L5椎间盘部分摘除术后腰椎及椎间盘的三维有限元模型,根据去除椎间盘位置及大小分为正常组、A1组、A2组、B1组、B2组、C1组和C2组,施加载荷后模拟人体7 个运动方向(直立、前屈、后伸、左右侧弯、左右旋转),记录应力变化并进行科学、系统的评价,为手术的选择、实施及预后提供一定的依据。
1 资料与方法
1.1 数据来源
选取一名45 岁的志愿者,身高170 cm,体重75 kg,除外腰椎骨折、侧弯、滑脱和椎间盘突出等疾病。
1.2 三维模型建立
应用螺旋CT(Computer Tomography)对正常人L4-L5节段进行薄层连续扫描,扫描范围从腰椎L1至骶骨S1,共获得810 片断层图像序列,以Dicom 格式存储在计算机中。再导入Mimics 15.0 医学图像处理软件中,利用软件三维重建功能建立L4-L5椎体三维几何模型。
1.3 椎间盘和终板模型的建立
将上述模型导入到3-matic 软件,以椎体骨的上下缘为边界,提取椎骨的上下曲面,用造型工具建立各节段椎间盘和上下终板模型。将椎间盘模型按照相应比例缩放和移动,再将缩放后的模型与上下节段椎体进行相应的布尔减操作,获得髓核模型,髓核占椎间盘模型的44%。将上述椎间盘模型与髓核模型再做布尔减操作,获得纤维环模型,占椎间盘的56%。
1.4 实体模型的建立
利用Geomagic Studio软件对曲面强大的修复和拟合能力,将Mimics 15.0 软件导出的L4-L5模型STL 文件导入Geomagic 中,利用网格衍生功能对其表面进行破面修补,封闭模型;对导入的模型进行特征分割后,重建L4-L5椎体的复杂曲面。将各节段模型以iges 格式导出。将上述模型导入Proe 软件中进行组装,生成L4-L5节段椎体的实体模型,模型包括椎间盘、髓核和上下终板,以供后续Hypermesh 软件使用。
1.5 网格划分
在Proe 软件中组装模型后,再将其导入Hypermesh 软件中,把模型的各部分分别建立为一个元件。对每个部分进行必要的quick edit 处理后,划分体网格。因为椎体骨为不规则模型,网格选择四面体Solid 187单元网格。见图1。
1.6 材料属性赋值
在Hypermesh软件中对模型的各部分进行材料属性赋值。见表1。
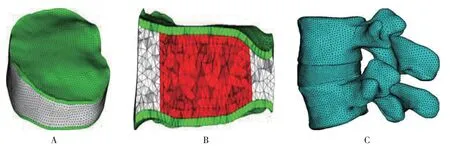
图1 L4/5椎体及椎间盘三维网格模型Fig.1 Three-dimensional mesh model of L4/5 vertebral body and intervertebral disc
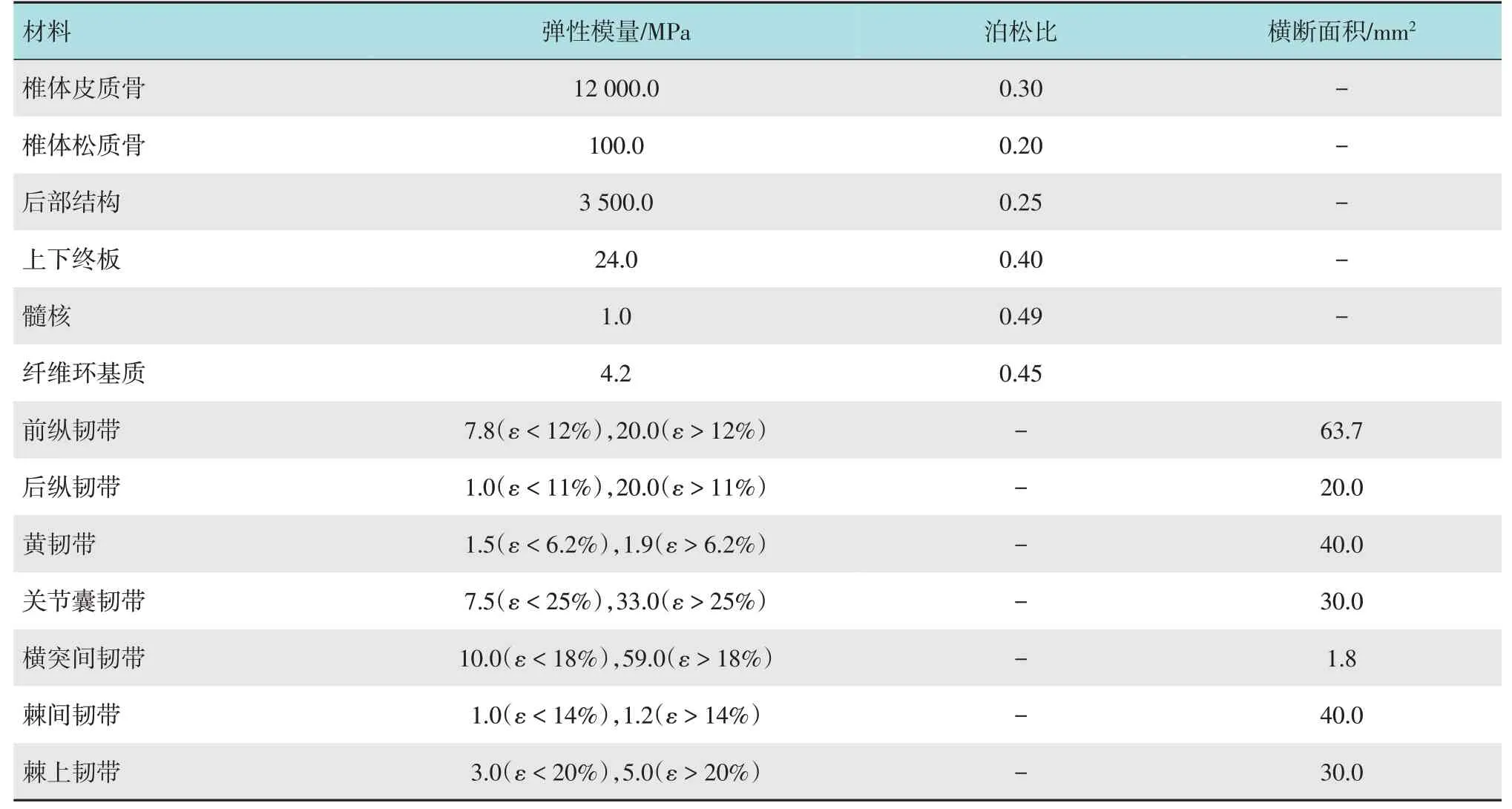
表1 各种材料属性弹性模量表Table 1 Attribute elastic modulus table of various materials
1.7 边界条件及约束
1.7.1 设定模型在L4-L5有限元模型中,将终板-椎体皮质骨、终板-椎间盘设置为绑定关系,腰椎小关节为有限滑移接触关系,其摩擦系数为0.1。将在Hypermesh 软件中已划分体网格和分配材料属性的体网格模型导出为*.cdb 文件,再导入到Ansys 13.0 软件中。模拟人体站立状态,模型的下端设置为全约束。
1.7.2 直立在L4胸椎上端面施加400 N,约等于人体上半身重力,模拟直立状态。
1.7.3 屈伸在L4胸椎上端面施加400 N,同时施加7.5 N·m 的力矩,方向指向±X 方向,模拟人体前屈状态和后伸状态。
1.7.4 侧弯在L4胸椎上端面施加400 N,同时施加7.5 N·m 的力矩,方向指向±Y 方向,模拟人体左侧弯和右侧弯;
1.7.5 旋转在L4胸椎上端面施加400 N,同时施加7.5 N·m 的力矩,方向指向±Z 方向,模拟人体左旋转和右旋转状态。
1.8 分组
根据椎间盘去除面积将样本进行分组。
基于MRI 中椎间盘突出的位置及程度,美国密歇根州的Lawrence Walter Mysliwiec 医生[4]提出了密歇根州立大学(Michgan State University,MSU)椎间盘分型。分型原则是延两侧关节突内缘画一垂直于椎间盘的线,两线之间平均分为4 部分,中间两部分位于椎管中央为A 区,旁边各一部分超过椎管中央且在椎管内部分为B 区,B 区外侧为C 区。
本研究中,把A 区去除其椎间盘的1/6 作为A1组,去除1/3作为A2组;将B、C区去除与A1组相等面积的椎间盘作为B1组、C1组,去除与A2组相等面积的椎间盘作为B2组、C2组。模拟椎间孔镜手术摘除不同位置、不同大小椎间盘后的应力状况。见图2和3。
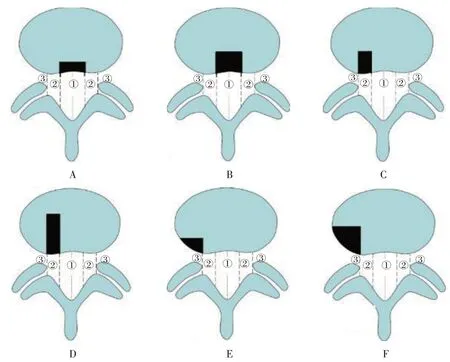
图2 椎间盘去除面积分组Fig.2 Groups of disc removal area
图3 不同组别椎间盘切割Fig.3 Discectomy in different groups
1.9 受力分析
建立腰椎间盘部分切除术后腰椎和椎间盘的三维有限元模型,施加载荷(400 N,约人体上半身重力),记录在直立、前屈、后伸、左右侧弯、左右旋转7个方向的运动状态下,正常组、A1 组、A2 组、B1 组、B2组、C1组和C2组的椎间盘应力分布及改变情况。
2 结果
对有限元模型模拟7 组在7 种体位下的椎间盘应力情况进行分析发现,髓核去除的6 组与正常组比较,不同体位下的椎间盘应力均升高(除后伸体位较正常组最少增加4%外,其他体位下最少增长幅度为11%~26%,最高增幅为12%~49%);前屈位下椎间盘应力最高,后伸位下椎间盘应力最低;A、B 组比较,除旋转体位下,椎间盘应力的改变为A2 组>A1组>B2 组>B1 组;左旋转体位下,椎间盘应力增加明显,B2组>B1组>A2组>A1组>正常组,这4组较正常组应力增加分别为39%、36%、22%和16%;在除去侧弯的5种体位下,C2组椎间盘应力为所有组中最高,且C1 组应力大于A1 组和B1 组。其中,C2组在左旋转体位下应力增长较正常组最多(48%),增长最少为后伸位(15%)。见表2和图4。
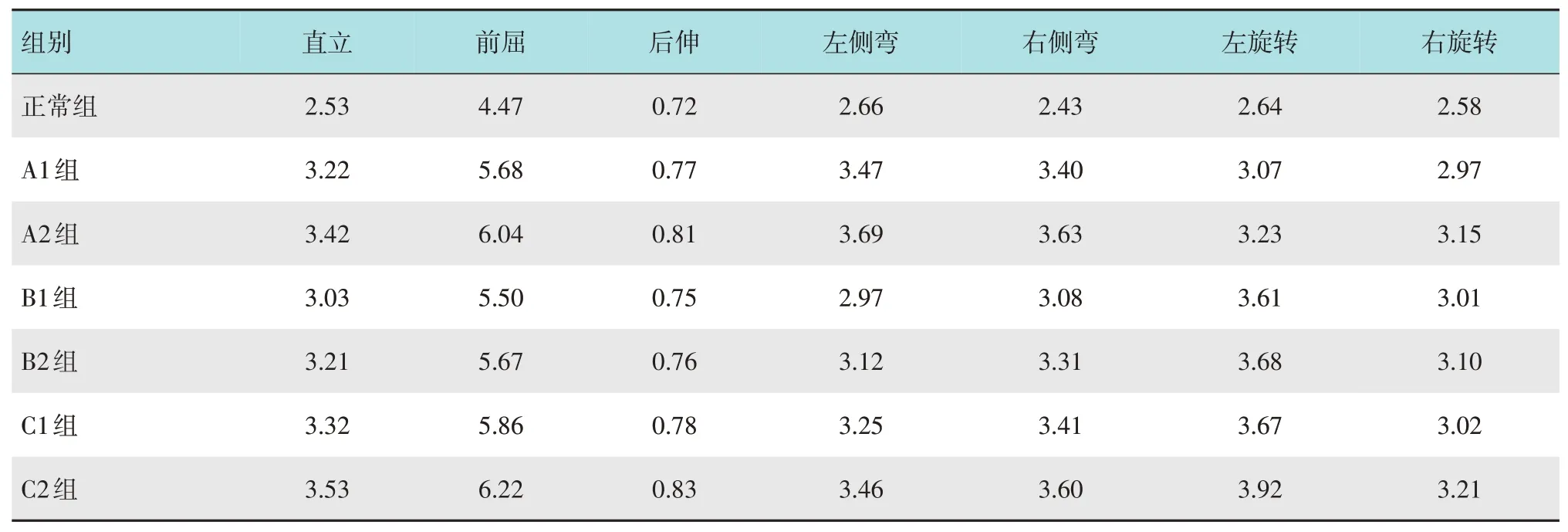
表2 不同组别在不同体位下的椎间盘应力比较 MPaTable 2 Comparison of disc stress in different groups and positions MPa
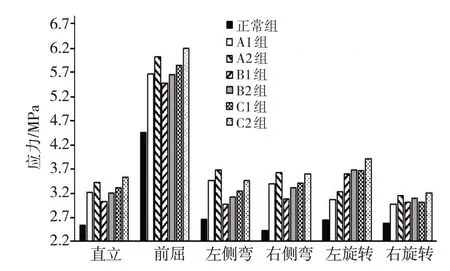
图4 不同组别在不同体位下椎间盘应力比较Fig.4 Comparison of disc stress in different positions of different groups
3 讨论
3.1 腰椎间盘突出症的分型
腰椎间盘突出症是脊柱外科的常见疾病,虽然临床分型很多,但至今缺乏统一公认的分型标准。按照其分型角度,常见分型为病理学分型、形态学分型及区域定位分型,其中以病理学分型更为常见。MACNAB 较早地提出了病理学分型,将腰椎间盘突出分为突出和疝出两类,前者包括局限和广泛型,后者包括脱垂、脱出和游离型,其中突出、脱垂的椎间盘纤维环是完整的[5]。AAOS&ISSLS 分类中,将椎间盘突出分为退变、膨出、突出和脱出,其中脱出又分为韧带下型、经韧带型和游离型。蒋位庄等[6]根据多年的临床经验,把脊柱源性腰腿痛分为腰椎间盘膨出型、弹力型突出、退变失稳型突出、增生狭窄型突出及少年软骨板破裂型突出等5 种类型。吴冠男等[7]采用经皮侧后方入路椎间孔镜TESSYS技术治疗46例弹力型腰椎间盘突出症患者,取得了满意的临床疗效。我国的胡有谷等[8]早在1998年提出了椎间盘突出的区域定位分型,该法根据腰椎间盘突出在CT 或MRI 中的表现,从矢状位、水平位和额状位的三维空间上反映椎间盘突出的位置。美国密歇根州立大学MYSLIWIEC 教授[4]2010年提出了腰椎间盘突出的MSU 分型,他把椎间盘突出的位置分为A、B、C 三区,把椎间盘突出的大小分为三级。这种分类简单易懂,且能很好地定位椎间盘突出的位置及大小,在临床上应用越来越广泛。
3.2 腰椎间盘突出的治疗方式
腰椎间盘突出传统的手术治疗方式为椎板间开窗、全椎板切除及半椎板切除腰椎间盘突出摘除术。这3 种手术,尤其是全椎板切除,创伤大、风险高、对术后腰椎的稳定性有较大影响。薛皓[9]对36例椎间盘突出患者分别行PTED与传统椎板开窗术,经临床研究对比发现,PTED 能准确去除突出的椎间盘,具有创伤小、出血少的特点,取得了可靠的治疗效果。随着微创理念及相应技术的发展,腰椎间盘突出症的微创治疗也得到了飞速进步。SMITH[10]在1964年采用经皮后外侧椎间盘穿刺注入木瓜凝乳蛋白酶的方法治疗腰椎间盘突出症患者,取得了较好的临床疗效,以此开辟了腰椎间盘突出症微创手术的先河,但其未对突出椎间盘直接切除,该方法只能应用于单纯隆起型腰椎间盘突出症的患者,而对游离型、破裂型椎间盘突出症患者的效果一般。日本的临床医师HIJIKATA[11]在1975年首次采用经皮腰椎间盘摘除术(percutaneous lumbar diskectomy,PLD)治疗腰椎间盘突出症患者,在C臂机透视下,于后外侧插入导针至椎间盘,逐级扩张,再用髓核钳摘除椎间盘,但该方法为非直视下操作,手术效果有一定的不可预见性。1997年,SMITH 和FOLEY[12]采用后路显微内镜椎间盘髓核摘除术(micro endoscopic discectomy,MED)治疗腰椎间盘突出症。MED 作为一种微创手术,能够在显微内镜的帮助下直观地看到突出的椎间盘及周围组织,具有创伤小、出血少和恢复快等优点。1999年,YEUNG[13]研制出第三代经皮椎间孔镜系统(YESS),它通过“安全三角”把工作套管置入椎间盘中,运用插入套管的内镜直视下从内向外将椎间盘髓核摘除,但难以清除游离于椎管内的椎间盘。2003年,德国HOOGLAND教授[14]在YESS基础上设计出椎间孔镜手术系统(TESSYS),它通过椎间孔通道把内镜插入椎管内髓核旁,直接摘除突出的椎间盘,扩大了手术的适应证,具有突出部位直视下精准减压、安全可靠的优点。近年来,相比MED,PTED疗效更确切、麻醉较简单、更微创且适应证广,从而得到了迅速的推广,并取得了满意的疗效。YU 等[15]统计了805例采用PTED或者MED手术的腰椎间盘突出症患者,PTED 组在住院时间、手术切口长度、术后卧床时间及ODI指数上均优于MED组。
3.3 手术前后椎间盘应力变化
本研究发现,前屈位下椎间盘应力最高,后伸位下椎间盘应力最低,可能与后伸状态下关节突关节分散了更多的应力有关;A、B组比较,除旋转体位下,椎间盘应力的改变为A2 组>A1 组>B2 组>B1 组,A1 组均大于去除面积是其两倍的B2 组,这说明:A组与B组椎间盘去除后相比较,宽度对其应力影响较大;左旋转体位下,椎间盘应力增加明显,B2组>B1 组>A2 组>A1 组>正常组,且B1 组大于去除面积是其两倍的A2 组,可能当左侧椎间盘去除过深时,患侧旋转能力降低,应力升高较大;在除去侧弯的5 种体位下,C2 组椎间盘应力为所有组中最高,且C1组应力大于A1组和B1组,这说明:在去除相同大小椎间盘的前提下,MSU 分型为C 型(外侧或极外侧椎间盘突出)的患者术后椎间盘应力增加大,术后退变风险相对较大,是腰椎间盘去除术后退变的高风险型,其次为A型(中央型椎间盘突出),B型(旁中央型椎间盘突出)是椎间盘去除术后的相对稳定型。
本研究表明,腰椎前屈时应力最大,椎间盘突出后应减少弯腰活动。处理椎间盘突出时,去除的椎间盘不要过宽,过宽会使其变形,且应力改变较大,术后出现退变、椎体下沉的概率相对较高。对于外侧或极外侧椎间盘突出的患者,应在保证效果的同时有限地去除椎间盘,不随意去除过多非致压椎间盘,以降低术后退变概率。
3.4 本研究的不足
本研究通过三维有限元模型模拟了PTED术后椎间盘的形态,并进行了有限元分析,对临床工作有一定的指导意义,但仍存在一些不足。有限元是通过计算机设备对模型进行3D 重建,并将材料赋值,使其更加符合生物体的力学实际情况,但模型重建时数据采集有单一性,研究者有自身的主观性,这些都直接影响了模型的有效性。人体、动物都有其结构的复杂性,且每个人都存在不同的个体差异,有限元模型不能完全代表人真实的生物学结构及力学情况。随着计算机技术、有限元软件及方法的进步,有限元模型必然会越来越接近真实,有限元方法在医学领域的应用将会更加广泛及准确。本研究依据MSU椎间盘分型,将去除不同宽度及深度的椎间盘分为7组(包括正常组);分组数据并不能完全代表所有手术中的去除位置、宽度和深度,且手术去除髓核的形态常为不规则形,去除大小也不完全相同,所以研究结果和具体临床应用还不能准确对应。本研究为一次性载荷分析,没有充分考虑疲劳载荷的影响,在椎间孔镜术后,椎体重复活动的累积效应或许会加重应力,加快区域的退变。
综上所述,本研究通过有限元的方法,对近年来非常流行并取得良好临床效果的PTED术后应力变化进行了分析,了解了摘除不同位置、大小的椎间盘对术后椎间盘应力的影响,对术中需去除椎间盘的大小及宽度有一定的指导作用,对应力改变及相应的椎间盘退变有更好的评估作用。
