基于黏着力观测器的列车空气制动防滑控制
2020-12-18马天和吴萌岭
马天和,吴萌岭,田 春
(同济大学铁道与城市轨道交通研究院,上海201804)
城轨列车一般采用电制动和空气制动复合的方式进行减速或停车,这两种方式均为黏着制动,制动力大小受轮轨间黏着条件的限制,而黏着条件受雨、霜、雪等气候条件及轨面状态(生锈、油污、落叶等)的影响[1-2],具有不确定性。当黏着条件恶化时,轮轨间能提供的黏着力将显著降低,不足以提供需要的制动力,轮对转速将迅速降低。若不能尽早检测到滑行,进而进行有效防滑控制,轮对将发生滑行甚至抱死,导致轨面、踏面擦伤,降低列车运行品质,延长制动距离,影响列车运营效率甚至引发安全事故。因此,研究列车制动防滑控制方法对提高防滑控制性能具有重要意义。
目前列车实际应用的空气制动防滑控制方法主要是逻辑门限控制[3],这是一种基于对轮对转速、减速度的测量,通过预设的速度差、减速度和滑移率等判据进行制动缸压力调节的方式。该方式工程实现比较简单,但其控制性能的优劣取决于对可能的轮轨黏着条件的预判的准确性和制动系统特性的先验知识。虽然制动系统特性可通过大量的地面试验加以掌握,但在复杂的实际运营条件下,仍不能保证有效防滑和充分利用黏着。因此,近年来在此基础上也有一些对传统控制方式的改进研究。周军等[4]提出一种基于速度差、减速度的复合矩阵式防滑控制策略,并完成防滑模拟测试和高速动车组实车防滑试验。曹宏发[5]采用模糊控制方法提高了防滑控制判据的适用性。但这些改进策略仍然需要依赖工程技术人员的经验,缺乏理论支撑。
除了传统控制方法之外,近年来也发展出一些新型防滑控制方法。左建勇等[6-7]分析了防滑过程中的黏滑特性,提出了基于黏滑特性的防滑控制方法并完成了试验验证。Kang等[8]提出一种基于史密斯预估器和命令图的控制方法,并基于硬件在环仿真环境完成了验证。陈哲明等[9]基于黏着系数和滑移率关系曲线的斜率预测方式,采用滑模变结构控制器与逻辑门限值相结合的方法进行防滑控制,并基于单一轨面条件进行了仿真。文献[10-11]研究了滑行时最优滑移率的获取及控制方法。但这些控制方法需要通过对制动缸压力的反复调整以保证控制精度,在实际应用中会降低防滑阀使用寿命,增大空气消耗量。另外,在汽车驱动和制动防滑控制领域,Wang等[12]针对汽车防抱死液压制动系统,研究了修正的滑模控制方法,提高了传统滑模控制方法的鲁棒性。Subudhi 等[13]将基于滑模观测器的自适应滑模控制与神经网络相结合,实现了电动汽车的驱动防滑。Yin 等[14]设计了基于车轮旋转角加速度和纵向滑移率的驱动防滑模糊控制器。这些研究可以作为借鉴。
本文采用扰动观测器方法设计黏着力观测器,对轮轨间利用黏着力进行实时观测,基于观测值和轮对运动状态参数调整滑行工况下的制动力控制目标,实现防滑控制。最后通过不同黏着工况的仿真验证了黏着力观测器的准确性和空气制动防滑控制方法的有效性。
1 控制器设计
地铁车辆目前广泛采用架控式制动系统,其气路原理如图1 所示,继动阀的作用类似于传统车控式制动系统中的中继阀,但其位置处于上游,在载荷调整阀作用下输出与载荷成比例的紧急制动水平的压力。下游的2组高速开关阀起制动与防滑双重作用,相当于将电空转换阀(EP 阀)和防滑阀合二为一。地铁车辆制动时,根据司机或自动驾驶系统下发的制动指令,电子制动控制单元进行目标制动力的计算,得到目标制动力后,根据当前的电制动力施加情况计算需补充施加的制动缸压力。当不滑行时,按照正常制动缸压力控制程序调节本转向架制动缸压力;一旦某一根轴检测到滑行,则防滑控制程序会接管该轴的2个高速开关阀进行压力调节。

图1 架控式制动系统气路原理Fig.1 Pneumatic scheme of a bogie-controlled braking system
对于传统防滑控制方法而言,若其判据参数设置不够合理,当列车制动级位较高、黏着水平较低时,易出现多车频繁滑行。在此过程中,虽然可通过防滑阀频繁排风来抑制滑行,避免轮对踏面擦伤,但频繁的排风导致列车总风消耗过快,影响紧急制动的安全性并且延长制动距离,不能充分利用黏着。因此本文提出基于黏着力观测器的防滑控制方法,可以充分利用黏着,同时避免过度排气和抱死擦伤。
本文所设计的控制器原理如图2 所示,当接收到制动指令后,电子制动控制单元根据制动指令的要求进行制动力控制,控制气制动控制单元中的高速开关阀建立压力,经基础制动装置摩擦副转换为摩擦力矩使列车减速。同时,黏着力观测器根据轴速(轮对旋转角速度ω)和制动缸压力Pbc对轮轨间利用黏着力进行实时观测。当黏着条件恶化时,轮轨间可用黏着力降低,黏着力矩不足以平衡摩擦力矩,导致轴速迅速下降。当滑移率超过某一限值后,由制动力控制切换为防滑控制,根据利用黏着力观测值和轮对滑移率s、车辆减速度v̇得到滑行状态下的目标制动力,然后通过气制动控制单元中的高速开关阀对制动缸压力进行有目标的调节,从而避免传统控制方法对于制动缸压力的周期式的试探性调整,防止制动缸压缩空气过度充排。
1.1 运动学模型
列车防滑控制时一般以轴为单位,根据该轴的运动状态调节其制动力。因此将列车的一个轮对及其分担的载荷视为防滑控制的研究对象,即相当于1/4车辆,如图3所示,建立其运动学方程:


图2 控制器原理Fig.2 Controller scheme
式中:ω为轮对旋转角速度;Jw为轮对转动惯量;Rw为车轮滚动圆半径;Fadh为轮轨间利用黏着力;Fb为车轮滚动圆半径处的等效制动力;M为1/4 车辆质量;v为车辆速度。

图3 1/4车辆模型Fig.3 1/4 vehicle model
1.2 黏着力观测器
轮轨间利用黏着力Fadh无法直接测量,本文采用扰动观测器[15]方法对其进行实时观测。由式(1)得:


式中:p为拉普拉斯算子。为抑制测量噪声,对式(4)右边进行一阶低通滤波(截止频率为λ)得:

将式(5)变形整理得:
对式(7)取拉普拉斯逆变换得:

其中参数λ的取值会影响观测值的收敛速度,所以在MATLAB/Simulink 环境下根据式(1)和式(2)建立运动学模型,根据式(8)和式(9)建立黏着力观测器模型,令λ取不同值进行仿真。仿真中黏着力设为5.6 kN,并作为观测值的参考基准,制动力设为7 kN,1/4 车辆质量设为14.3 t,轮对转动惯量设为145 kg·m2,车轮滚动圆半径设为0.43 m。仿真结果如图4所示,其中除黏着力参考值之外的4条曲线为当λ分别取 1、10、50 和 100 时的黏着力观测值。可见随着λ的增大,黏着力观测值的收敛速度加快,并且当λ取值增大到一定程度后,收敛速度趋于饱和。

图4 不同λ取值时的利用黏着力观测值Fig.4 Observations of use of adhesion force at different λ values
1.3 滑行时的制动力控制目标
列车制动时轮对滑移率s的表达式为

将滑移率对时间求导并变形得:

再将式(10)代入式(11)得:

在列车制动过程中,当检测到轮对滑移率达到某一限值时,为保证滑移率不继续增大,应使其导数由于v>0,故所以角速度的导数需满足:

将式(13)代入式(1)得:

式(14)右边即为在不使轮对滑行加剧前提下可对其施加的最大制动力,其中Jw和Rw为已知的车辆设计参数;滑移率s根据车速和轴速测量值换算̇一般通过对非滑行轴的转速测量来换算得到,同时近年来已有新型制动控制装置[16]中集成减速度传感器,因此也可直接采集。Fadh为利用黏着力,将其以式(9)所得的黏着力观测值代替后可得滑行时的制动力控制目标为

因此将式(8)~(10)、(15)在电子制动控制单元中编程实现后,即可根据式(15)确定的制动力控制目标进行防滑时的制动缸压力控制。
2 控制仿真与分析
2.1 仿真环境说明
为验证1.2 节黏着力观测方法和1.3 节防滑控制方法的有效性,基于MATLAB/Simulink 软件对其进行建模仿真。以一阶惯性环节模拟制动缸压力的响应特性,则制动力Fb(摩擦力矩在车轮滚动圆半径处的等效作用力)与制动缸压力Pbc的关系可表示为

式中:T为一阶惯性环节的时间常数;p为拉普拉斯算子;f为闸片摩擦系数;φ为制动盘比率;ρ为制动倍率;η为机械效率;S为制动缸活塞有效作用面积;Fs为复位弹簧力。
仿真中轮轨黏着条件基于Polach模型[17]进行模拟,黏着力可表达为

式中:Q为轮对接触斑正压力;kA,kS为黏着力调节参数;a,b分别为接触斑椭圆的长、短半轴长;G为剪切模量;s为滑移率;C11为Kalker系数;μ为轮轨间摩擦系数;μ0为轮轨间最大摩擦系数;A,B分别为摩擦系数调节参数;Δv为滑移速度。
本文针对列车空气制动防滑问题进行研究,因此仿真工况为纯空气制动,制动初速为100 km·h-1,制动目标减速度为1 m·s-2。其余仿真参数取值见表1。
为验证基于黏着力观测器的防滑控制方法在黏着条件恶化时的控制效果,分别对持续低黏着和黏着2次突变工况进行仿真。黏着条件如图5所示,根据Polach 黏着模型,持续低黏着工况的轮轨间最大摩擦系数μ0取0.05,黏着2 次突变工况的轮轨间最大摩擦系数μ0取值为


表1 仿真参数Tab.1 Simulation parameters

图5 仿真黏着条件Fig.5 Simulation of adhesion conditions
2.2 工况1:持续低黏着条件
持续低黏着工况的仿真结果如图6~图10 所示。图6展示了黏着力观测器对利用黏着力的观测结果,其中参考值由Polach模型得到,观测值由黏着力观测器得到。可以看出黏着力观测值较为准确,稳态误差近似为0,在发生滑行导致利用黏着力下降的瞬间和随列车速度降低利用黏着力上升的过程中都能保持跟随。
图7 表示防滑过程的列车制动减速度情况。其中目标值为只有在黏着条件较好,未发生滑行时才能达到的制动指令值。理论最大值为在仿真中根据Polach 模型离线分析得到的理想值,当黏着条件恶化时,理论上能达到的最大减速度将小于目标值。实际值为仿真得到的列车减速度,可以看出减速度实际值很接近理论最大值,黏着利用较为充分。
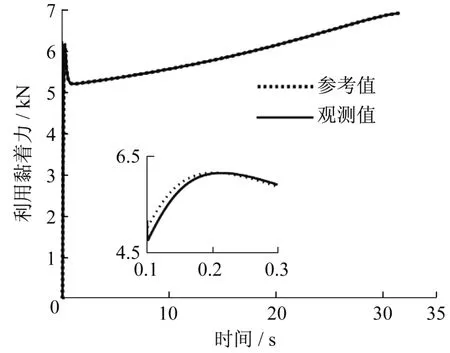
图6 工况1利用黏着力观测结果Fig.6 Observation results of use of adhesion force in condition 1

图7 工况1制动减速度时间历程曲线Fig.7 Time-history curves of braking deceleration in condition 1

图8 工况1车速和滑行轴速度时间历程曲线Fig.8 Time-history curves of vehicle speed and skidding axle speed in condition 1
制动过程中车速和轴速的变化如图8 所示,轮对滑行程度得到控制,全程无“抱死”现象发生。如图9所示,轮对滑移率在初始滑行时刻增大,达到最大值之后一直保持下降。防滑过程中制动缸压力的变化如图10所示,可以看出在制动开始后制动缸压力上升,当发生滑行后在防滑控制的作用下迅速调整了制动缸压力的目标值,使之下降到当前黏着条件允许的程度。之后随着列车速度的降低,黏着系数缓慢上升,故制动缸压力也缓慢上升。

图9 工况1滑移率时间历程曲线Fig.9 Time-history curve of slip ratio in condition 1

图10 工况1制动缸压力时间历程曲线Fig.10 Time-history curves of braking cylinder pressure in condition 1
2.3 工况2:黏着条件2次突变
黏着条件2 次突变工况的仿真结果见图11~图15。如图11所示,随着黏着条件2次突变的过程,黏着力观测器全程跟踪利用黏着力参考值的变化。黏着条件第1次突变时,黏着系数减小,利用黏着力降低,所以如图12 所示,实际减速度无法继续保持目标值,而变为跟踪理论最大值。此时,轮对出现滑行(图13),滑移率增大(图14),在防滑控制作用下,制动缸压力迅速下降(图15)。

图11 工况2利用黏着力观测结果Fig.11 Observation results of use of adhesion force in condition 2

图12 工况2制动减速度时间历程曲线Fig.12 Time-history curves of braking deceleration in condition 2

图13 工况2车速和滑行轴速度时间历程曲线Fig.13 Time-history curves of vehicle speed and the skidding axle speed in condition 2
黏着条件第2次突变时产生的利用黏着力的尖峰(图11)是由于此时轨面最大摩擦系数μ0瞬间由低到高变化(图5)引起。此时刻之前轨面最大摩擦系数μ0=0.05,轮对滑移率较大,利用黏着力保持在较低水平;当μ0由0.05变化为0.3时,相同滑移率下对应的黏着系数变大,所以利用黏着力瞬间增大,趋向于μ0=0.3 时的对应值,使轮对滑移率迅速减小(图14),轮对滑行状态结束(图13)。由图15可看出此瞬间由于利用黏着力的尖峰,制动缸压力的目标值也跟随出现尖峰,但由于制动缸压力上升具有惯性,实际值并未来得及增大。这一瞬间之后,滑行结束,利用黏着力下降,制动缸压力保持在与目标减速度相匹配的水平。

图14 工况2滑移率时间历程曲线Fig.14 Time-history curve of slip ratio in condition 2

图15 工况2制动缸压力时间历程曲线Fig.15 Time-history curves of brake cylinder pressure in condition 2
上述仿真结果表明基于黏着力观测器的防滑控制方法可以实现当黏着条件突然恶化时,列车实际减速度跟踪此黏着条件所能提供的最大减速度;黏着条件恢复后,实际减速度能重新跟踪目标减速度,制动全过程中滑行程度能得到有效控制且无“抱死”现象发生。
3 结语
空气制动是列车制动方式的主要组成部分,作为黏着制动方式,其制动效果受制于轨面黏着条件。本文提出基于黏着力观测器的列车空气制动防滑控制方法并通过仿真验证了其有效性。
(1)建立1/4 车辆运动学模型,分析了滑行状态下车轮角加速度和车辆减速度的关系,在此基础上提出滑行状态下制动力控制目标,设计防滑控制器。
(2)基于制动力和车轮旋转角速度设计黏着力观测器,可以对制动防滑过程中的利用黏着力进行在线观测,为防滑控制器提供输入。
(3)通过仿真验证了黏着力观测器和防滑控制器的有效性,分别进行了持续低黏着条件和黏着2次突变条件下的防滑控制仿真。结果表明本文的黏着力观测器可对恒定和突变黏着条件下黏着力的变化进行跟踪,防滑控制器能及时控制轮对的滑行程度,避免车轮“抱死”并充分利用可用的黏着力。
(4)防滑控制过程不需要对制动缸进行反复充排气,可降低压缩空气的消耗量,保证紧急制动的安全性,提高了其工程应用价值。
