基于安全风险的恶劣天气下高速公路建议车速确定方法
2020-12-18卢建涛王艳丽
吴 兵,翟 犇,卢建涛,王艳丽
(1.同济大学道路与交通工程教育部重点实验室,上海201804;2.中国民航科学技术研究院,北京100028)
高速公路在带来巨大的社会经济效益的同时,由恶劣天气引发的重、特大高速公路交通事故也日渐频发。恶劣天气会对交通流运行特征产生影响,进而也会带来交通安全隐患。在高速公路交通安全管理中,速度管理是重要的管理手段。
绝大多数国家对车辆在高速公路上行驶都有最高车速限制,如意大利最高限速为140 km·h-1,日本为100 km·h-1,英国为113 km·h-1,我国《道路交通安全法》规定高速公路限速标志标明的最高限速不得超过 120 km·h-1[1]。但是,由于各高速公路自身条件和交通情况不同,即使在同一条高速公路上,不同路段、不同天气、不同交通条件对于速度限制值的要求也有所不同,最高限速往往只能作为一种指导性的标准。欧美国家关于高速公路速度限制的相关研究开展较早,限速值的确定方法主要包括法定限速、最优限速法、工程研究方法和专家系统方法4种[2]。其中应用最为广泛的为工程研究方法,即通过调查获得V85(85%位车速),确定最初的限速值,然后考虑公路线形、事故情况,最终设定速度限制值。我国《公路路线设计规范》(JTG D20—2017)[3]中指出,选取运行速度V85作为限速取值依据,同时考虑路段的安全记录、路侧环境等情况[4]。然而,限速是对车辆最高行驶速度的限制,并非安全行驶车速的建议值,目前对于安全建议行驶车速的相关研究较少,特别是恶劣天气条件下。
近年来,随着主动式交通管理与控制的理念愈加成熟,可变限速(也叫速度协调控制或动态限速)的相关研究逐渐增多,部分学者分析了可变限速策略对于降低路段交通事故风险的效果,如Saha[5]、Kwon[6]等研究发现,快速道路上速度协调控制系统有效减少了交通事故发生频次。Waller[7]、Li[8]、王艳丽[9]等也提出了多种可变限速算法和策略。但在可变限速控制中关于启动阈值、目标安全限速值等关键参数的取值目前的研究大多依据经验或历史数据确定,安全行驶车速的计算方法的科学性和合理性仍有待研究。对于恶劣天气下的可变限速,也有学者进行了研究[10],发现可变限速有效降低了不良天气下行驶车辆平均速度以及速度离散,但其限速值为基于历史数据的条件式限速,难以随着天气和交通流特征的变化而实时动态变化。因此,本文提出了基于安全风险的恶劣天气下高速公路建议车速制定方法。
本文首先给出了恶劣天气下高速公路建议车速确定方法的思路和流程,随后明确了恶劣天气下高速公路交通安全风险的评估与等级划分方法,在此基础上提出了恶劣天气下高速公路建议车速计算方法,并通过实例分析展示了方法的应用,给出了G15沈海高速(上海段)雾天不同能见度条件下高速公路建议车速取值。
1 恶劣天气下高速公路建议车速的制定流程
高速公路建议车速是指在特定的道路、环境、交通组成的综合情境下,驾驶员受到道路条件、车辆稳定性、驾驶员处理能力等因素的影响,能够保持安全行驶所建议采取的车速。通常来讲,驾驶员会在行驶过程中依据道路条件、车流状况、所驾驶车辆性能等因素经综合考虑后形成心理上自认为的安全行驶车速,即主观期望车速[11]。但主观期望车速是驾驶员自认为安全的行驶车速,是一种主观判断,并非道路交通意义上真正安全的行驶车速,无法体现客观行车环境对安全行车的要求[12]。安全车速和主观期望车速之间的差值导致了高速公路交通安全风险的产生,因此需要进行车速管理,给出高速公路建议车速。
交通安全风险是指,在某些随机因素可能引起的实际情况与预定目标产生偏离的交通安全状况下,发生交通安全事故的可能性或概率[13]。车速既是交通安全风险的一个重要影响因素,也是交通安全风险的关键指标。因此本文从交通安全风险的角度研究恶劣天气下高速公路建议车速的确定方法。恶劣天气下高速公路建议车速的制定流程如图1所示。
恶劣天气下高速公路建议车速制定流程中,关键是通过建立高速公路交通安全风险模型来进行安全风险评估,并利用交通风险值计算安全行驶车速。
2 恶劣天气下高速公路交通安全风险评估与等级划分
2.1 基于贝叶斯Logistic回归的交通安全风险评估模型
传统集计交通事故模型是一种静态、被动的“事后”分析方法,难以反映交通流动态特征对事故风险的影响。近年来,交通安全学界开始利用高精度交通流数据研究实时事故风险模型[14-16],这些模型能够将实时交通流数据作为输入数据研判交通事故风险。实时事故风险评估主要研究如何区分交通事故发生前交通流特征与正常交通流特征,揭示交通事故发生前可能存在的共性交通流特征,即事故征兆因子,实现交通事故风险的实时判别。
交通安全风险评估模型中,响应变量事故发生与否是一个二分变量,Logistic回归模型在处理该问题时被广泛应用。不同于传统基于最大似然估计求解的Logistic 回归模型,贝叶斯Logistic 回归给出模型参数的后验概率分布,提供了灵活的框架,通过设定先验概率分布,可以实现模型的空间移植。另外,贝叶斯Logistic回归能够有效避免小样本、多变量数据引起的过拟合问题[16]。
设y为一个二分类因变量,事故发生时y=1,无事故发生时y=0。贝叶斯Logistic回归的公式如下:

式(1)~(2)中:pi为交通事故发生的概率;ηi为效用函数;xji为样本i中变量j的值;β0为回归截距;βj为解释变量j的回归系数。
模型的似然函数表达式如下:
式中:N为样本数。
模型中的参数均采用无信息先验概率分布:

式中:μj为期望为方差。
通常具有大方差的先验分布可以代表无信息先验概率分布,令μj=0
根据贝叶斯定理,参数的后验联合概率密度分布正比例与似然函数和先验概率分布的乘积,即:
2.2 基于模糊C-均值聚类的交通安全风险分级划分
将高速公路交通风险分为安全状态、可允许风险、中度风险、重大风险、不可接受风险5个等级,具体风险等级划分的标准如表1 所示。其中,安全状态和可允许风险两个等级的交通流状态被视为较为安全状态,将这两个等级状态下的车辆行驶速度作为安全行驶车速的取值范围。

表1 风险等级划分标准Tab.1 Risk classification standard
将恶劣天气下高速公路交通风险评估模型计算得到的交通风险值进行聚类,对交通风险进行等级划分。由于交通风险不同等级之间的界限有一定的模糊性,本文使用模糊C-均值聚类算法[17]进行交通风险等级划分,避免传统的系统聚类法或K-均值聚类法等方法把分类的对象严格地划分为某个类中存在的不合理性。
模糊C-均值聚类算法基于样本与c个聚类中心间的加权相似性测度,对目标函数进行迭代最小化,以确定其最佳的类别。目标函数定义如下:
且满足条件:


式中:X={x1,x2,…,xn}为聚类样本集合;n为聚类空间的样本个数;V={v1,v2,…,vn}为c个聚类中心;c为聚类的类别数为xk与vi之间的归一化距离维的矩阵;uik为第k个样本对i类的隶属度值;m为初始幂指数参数。
模糊C-均值聚类法计算步骤如下:
第1 步:根据样本xk划分类的个数c,幂指数m>1 和初始隶属度矩阵取[0,1]上的均匀分布随机数来确定U(0)。令l=1表示第1步迭代。
第2步:计算第l步的聚类中心V(l):
第3 步:修正隶属度矩阵U(l),计算目标函数值J(l)。
第4 步:对给定的隶属度终止容限εu>0,或目标函数终止容限εJ>0,或对于最大迭代步长Lmax,当或 当l>1,|J(l)-J(l-1)|<εj有l>Lmax或l>Lmax时,迭代停止,否则l=l+1,然后重复第2步,第3步。
经过上述的循环迭代之后,当目标函数达到最小值时,根据最终的隶属度矩阵U中元素的取值确定所有样本的归属,当uik=max(uik)时,可将样本xk归为第j类。
2.3 实例分析
2.3.1 交通安全风险评估样本数据说明
以G15 沈海高速(上海段)数据为样本,进行案例分析。采集了 2013 年 1 月 1 日至 2013 年 12 月 31日时段沈海高速(上海段)部分路段的交通流数据、天气数据及道路特征数据。
采用非配对病例-对照研究方法提取正常情况下的交通流数据、天气数据和道路特征数据,并进行数据匹配。其中,选取天气状况为雾天和雨天的事故数据,共86个;对于样本中的每一个事故数据,按照事故和非事故数据 1:4 的比例[18],从正常条件下的交通流数据中随机选取4 组非事故数据,并匹配相应的天气数据,共344 个。样本数据说明如表2所示。
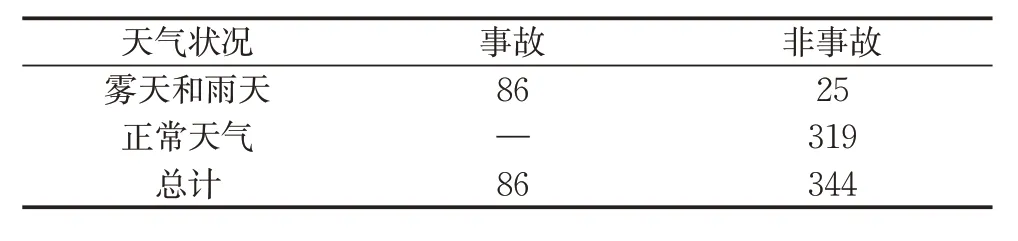
表2 样本数据描述Tab.2 Dataset description
2.3.2 交通安全风险评估模型建立
基于样本数据集,利用随机森林算法,筛选模型变量,最终选入模型中的变量如表3所示。
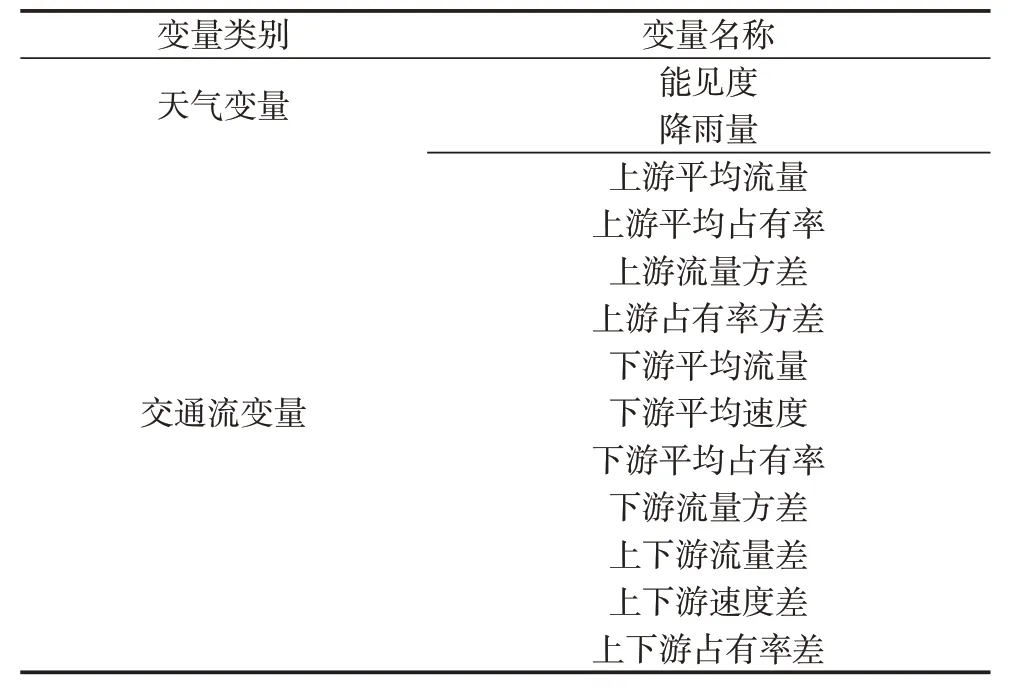
表3 变量筛选结果Tab.3 Variable selection result
利用R软件的rstanarm包,实现贝叶斯Logistic模型的建立,并通过马尔可夫链蒙特卡罗方法(Markov Chain Monte Carlo,MCMC)方法计算各个回归系数的后验概率分布。模型标定结果如表4所示。
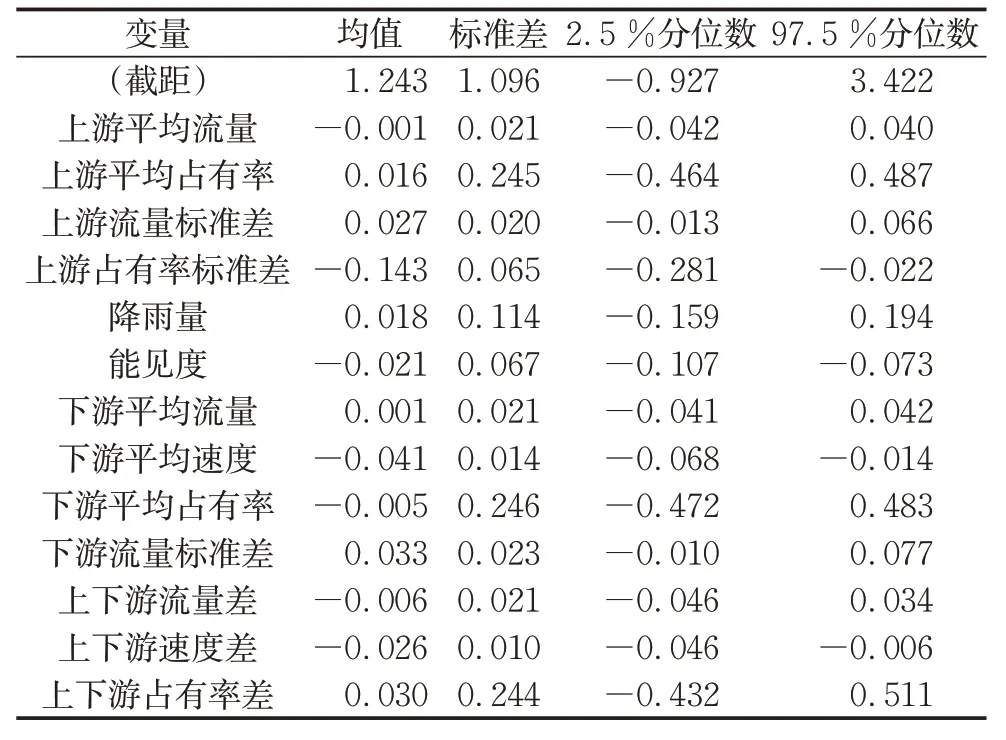
表4 模型参数标定结果Tab.4 Model parameter calibration result
2.3.3 交通安全风险等级划分
根据模型标定结果,计算交通风险值。通过模糊C-均值聚类算法,根据高速公路交通风险等级划分标准确定聚类数为5,将交通风险值进行聚类分析,结果如图2和表5所示。
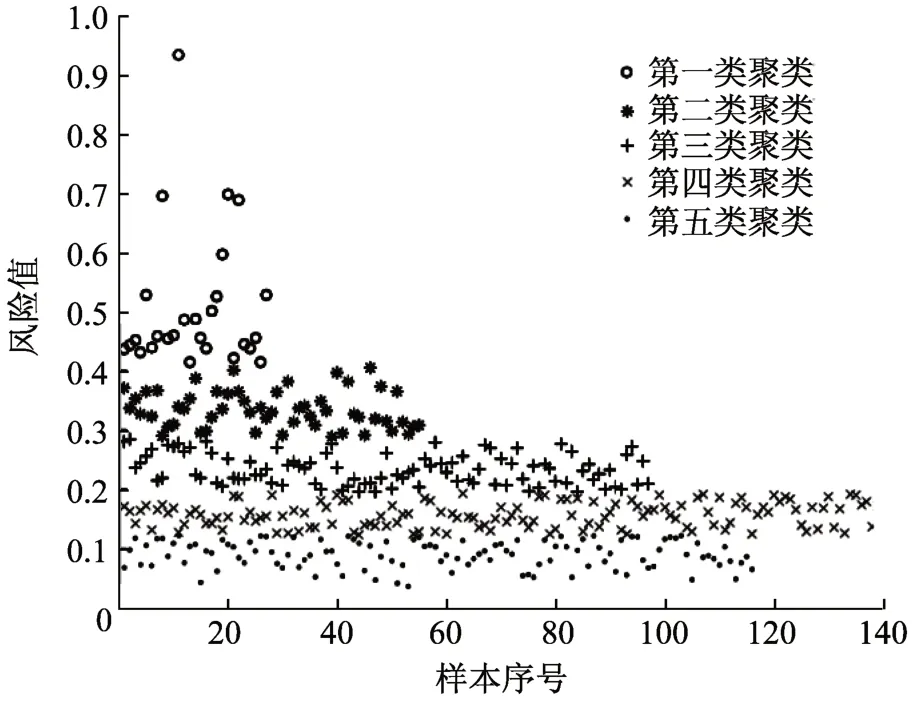
图2 交通风险等级聚类结果Fig.2 Traffic risk level clustering result

表5 各聚类的最大值和最小值Tab.5 Maximum and minimum values for each category
依据交通风险值的各聚类类别的最大值、最小值和风险等级划分的标准,确定恶劣天气下高速公路交通不同预警风险等级所对应的交通风险值范围,如表6所示。
由此得到风险阈值为0.2,即选取风险值小于0.2 的交通流状态下的车辆运行速度作为安全行驶车速的取值范围。

表6 交通风险预警等级划分Tab.6 Traffic risk warning level division
3 恶劣天气下高速公路建议车速计算
3.1 基于交通风险分布高速公路安全行驶车速计算
对交通风险进行控制需要从有潜在交通发生的时候进行干预,降低高速公路交通运行风险。选择安全风险等级为安全状态和可允许风险两个等级的交通流状态,将该状态下车辆行驶速度作为安全行驶车速的取值范围。统计交通风险值小于阈值的所有车辆运行速度,绘制累积车速分布曲线。
累积车速分布曲线中,累积频率为85%时对应的车速,即85%位车速,是最高车速限制的重要依据[19]。基于85%位车速的车速限制方法是迄今为止被广泛采用的方法。Agent[20]和Fitzpatrick[21]等对车速限制方法进行了研究,认为85%位车速应作为车速限制的基础。
因此,基于交通风险分布的高速公路安全行驶车速计算方法为,根据不同恶劣天气条件下的交通安全风险分布,选取交通风险值小于风险阈值的交通流状态作为安全车速的确定范围,绘制该范围内的累积车速分布曲线,将车辆运行速度的第85%位车速作为相应天气条件下的安全行驶车速。
3.2 基于停车视距的高速公路安全行驶车速修正
停车视距指的是同一车道上,车辆行驶时遇到前方障碍物而必须采取制动停车时所需要最短行车距离。停车视距可分解为反应距离、制动距离和安全距离三部分,如图3所示。
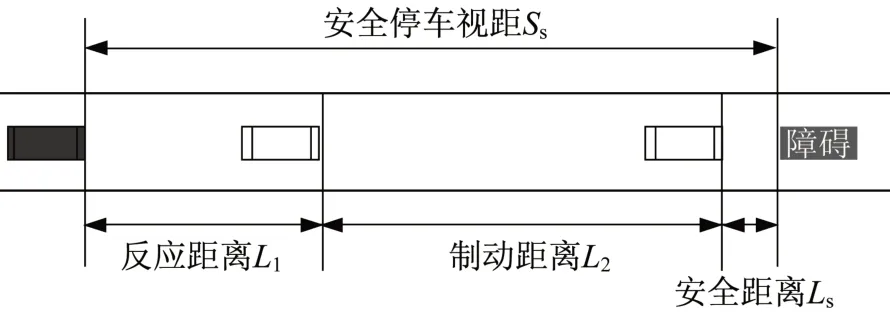
图3 跟车状态下的停车过程Fig.3 Stopping process when cars follow
一般情况下,驾驶员发现前面车辆时,前车处于制动状态,此时后车停车所需的安全距离应满足:

式中:L1为后方车辆驾驶员反应时间内的车辆行驶距离,m;L2为后方车辆制动时间内的行驶距,m;Ls为安全距离,一般取值为5~10 m,为保障恶劣天气下的行车安全,Ls取值为20 m;Lv为路段的可视距离,m。
在恶劣天气下,驾驶员有效视距和路面附着系数会发生变化,为了保障车辆的安全行驶,应该考虑最不利的情况,即由于车辆故障、轮胎损坏、抛锚、货物洒落及事故等原因,前方物体的速度为零,车流中出现严重的速度差,后车必须进行紧急制动。一般情况下驾驶员的反应时间为0.5~1.7 s[22],在恶劣天气下,道路行车环境恶劣,驾驶人员反应时间取值为2.5 s。
将恶劣天气下的能见度作为可视距离,计算得到基于停车视距的高速公路安全车速,如式(11)所示:

式中:V为安全车速,km·h-1;f为路面的附着系数;i为坡度,%.
3.3 恶劣天气下高速公路建议车速取值
对比两种方法等到的不同雾天等级条件下高速公路安全行驶车速,综合考虑不同恶劣天气等级下的交通风险分布和停车视距理论,给出不同恶劣天气等级下高速公路建议车速。为保障恶劣天气下高速公路行车安全,选择更低的安全车速作为该天气等级下的建议车速。
3.4 实例分析
3.4.1 高速公路建议车速计算样本数据说明
以G15 沈海高速(上海段)为研究对象,采集了2013 年 1 月 1 日至 2013 年 12 月 31 日的交通流数据及天气数据,并进行数据匹配。为减少数据噪声,将交通流数据以5 min 进行集计。依据恶劣天气下高速公路交通风险评估模型计算雾天条件下的交通风险分布,基于交通风险分布计算高速公路安全行驶车速,并通过停车视距理论进行修正,最终得到雾天条件下高速公路建议车速。
3.4.2 基于交通风险分布计算雾天安全行驶车速
参照《高速公路交通气象等级》(QX/T 111—2010)[23],雾天等级划分为4个等级。通过恶劣天气高速公路交通风险评估模型计算不同等级条件下的高速公路交通风险分布,如图4 所示。图中每个元素代表样本数据集中的一个数据,x坐标即5 min的平均速度,km·h-1;y坐标即 5 min 内平均流率转换的小时流量,veh·h-1;z坐标即交通风险值。
在不同雾天等级条件下,选择高速公路交通风险值小于等于0.2的交通流状态作为安全车速的确定范围,绘制该状态下车速累积频率分布曲线并计算车辆运行速度的第85%位车速,如图5所示。

图4 不同能见度等级下交通风险分布Fig.4 Traffic risk distribution in different visibilities
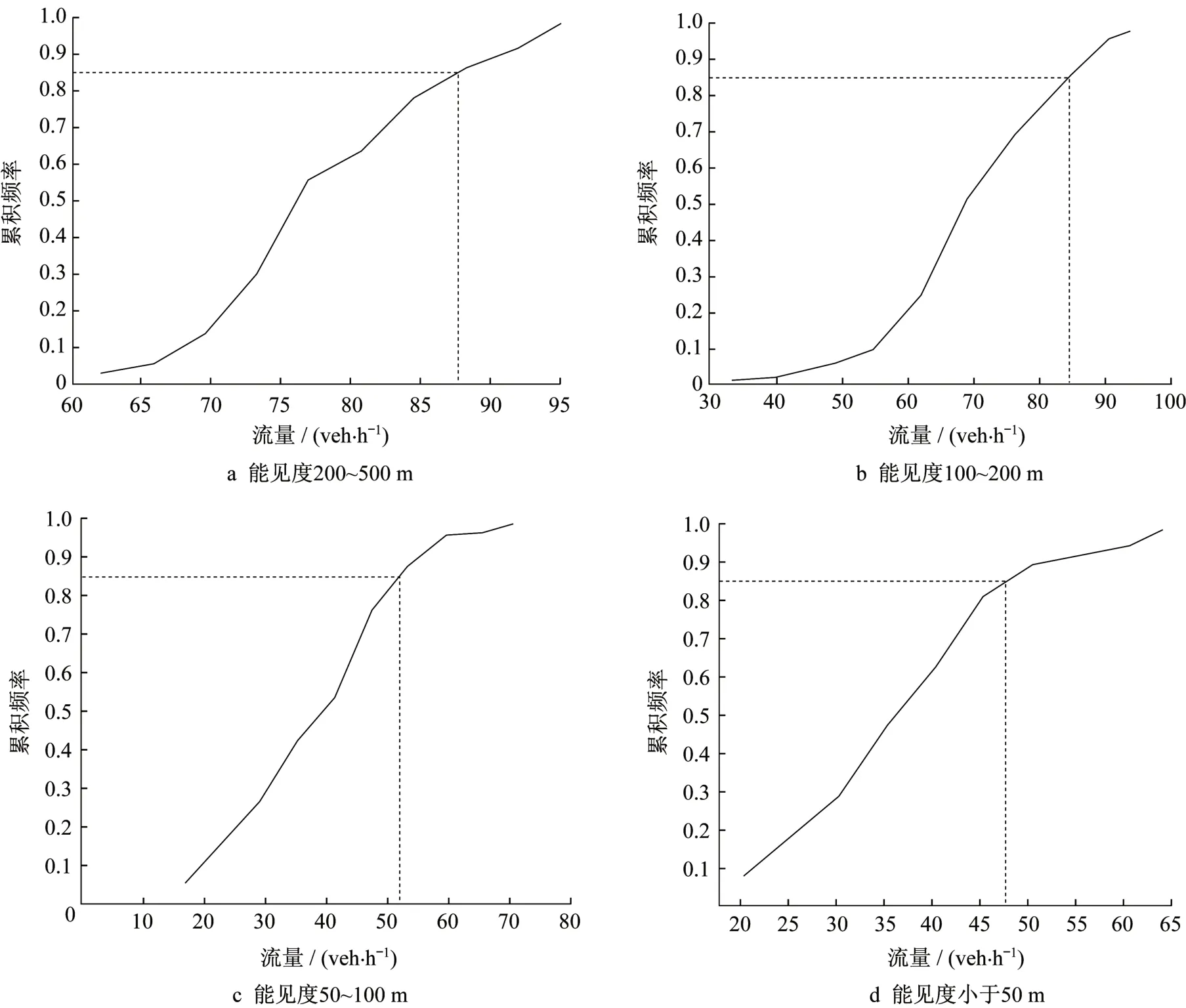
图5 不同能见度等级下速度累积频率分布曲线Fig.5 Accumulated frequency distribution of speed in different visibilities
依照速度累积频率分布曲线图,计算得到不同能见度等级下车辆运行速度的第85%位车速,为方便高速公路驾驶人员接受和管理部门发布信息,将第85 %位车速取整后给出安全行驶车速,如表7所示。

表7 基于安全风险的不同能见度等级下安全行驶车速Tab.7 Safe speed in different visibilities based on safety risks
3.4.3 基于停车视距修正雾天安全行驶车速
雾天天气时,由于雾水落于路面,使得路面潮湿,附着系数降低,取潮湿路面的附着系数f=0.6。依据《公路工程技术标准》(JTG B01—2014)[24]中关于高速公路纵坡的规定:设计速度为120 km·h-1,最大纵坡为3%;设计速度为100 km·h-1,最大纵坡为4%。G15沈海高速的设计速度为100 km·h-1,最大纵坡取4%。
根据基于停车视距的高速公路安全行驶车速模型,通过对能见度及道路纵坡取不同数值,计算得到不同能见度等级下安全车速。为方便高速公路驾驶人员接受和管理部门发布信息,将车速取整后给出不同等级下安全行驶车速,如表8所示。
3.4.4 雾天高速公路建议车速取值
当能见度在200~500 m 范围内,基于停车视距理论,无需对高速公路上行驶车辆进行速度控制,基于该天气条件下的交通风险分布,高速公路建议安全车速为85 km·h-1。当能见度小于200 m 时,基于交通风险分布计算得出的建议安全车速大于基于停车视距得到的结果,为保障恶劣天气下高速公路交通安全,选择更低的安全车速作为该天气等级下的建议车速,如表9所示。其中,能见度小于50 m时,驾驶员在高速公路上以10 km·h-1的速度行驶较为困难,考虑到在实际应用中驾驶员的主观因素及执行难易程度,此情况下建议采取封闭高速公路的措施。
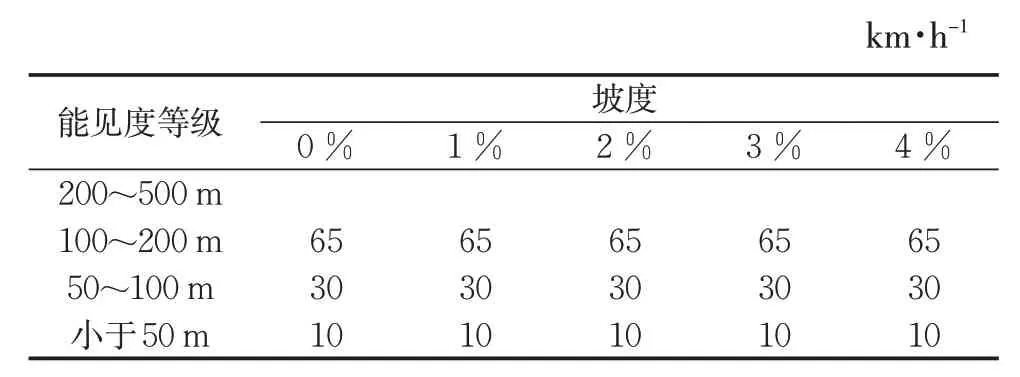
表8 基于停车视距的不同能见度等级下安全行驶车速Tab.8 Safe speed in different visibilities based on stopping sight distance
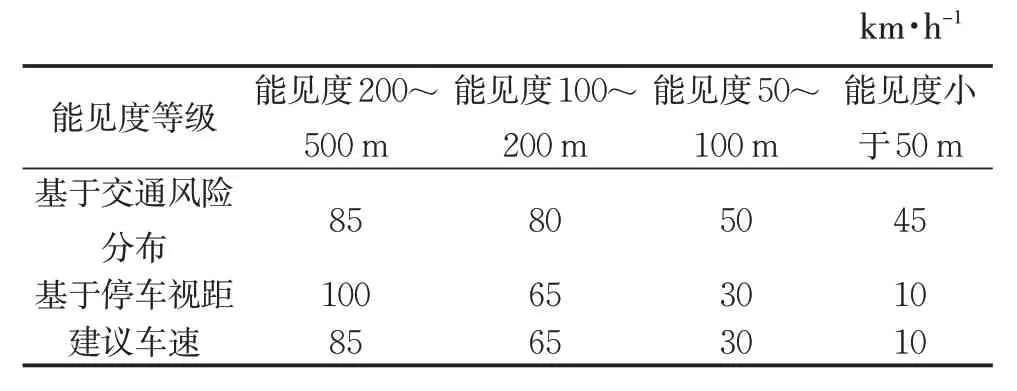
表9 不同能见度等级下建议车速Tab.9 Recommended speed in different visibilities based on stopping sight distance
4 结语
从交通安全风险角度出发,提出了恶劣天气下高速公路建议车速的确定方法。通过建立交通安全风险评估模型,划分交通风险预警等级,根据不同天气等级下的交通风险分布,按照安全交通风险预警等级确定不同天气等级下的初定安全行驶车速,并利用停车视距原理对基于安全风险计算得到的安全行驶车速进行修正,给出恶劣天气下高速公路建议车速。以G15 沈海高速(上海段)为例,展示了计算方法的应用,并给出了雾天不同能见度条件下高速公路建议车速取值。
论文综合考虑了影响车速的多种因素,尤其考虑了交通流条件和天气条件等可变因素对速度的影响,从而可以实现动态地确定建议车速。引入了交通安全风险作为建议车速制定的主要依据,从影响交通安全风险的因素出发,分析了交通安全风险和建议车速的关系。利用基于停车视距原理对安全行驶车速进行修正,保证了恶劣天气下高速公路建议车速满足停车视距的安全要求。
由于数据、时间等限制,基于安全风险的恶劣天气下高速公路建议车速的实施效果以及具体的实施细节还需要进一步研究,后续可进一步探索基于交通风险评估的恶劣天气下高速公路交通安全主动控制策略。
