面向自动驾驶路测驾驶能力评估的避险脱离率模型
2020-12-18涂辉招刘建泉侯德藻
涂辉招,崔 航,鹿 畅,李 浩,刘建泉,侯德藻
(1.同济大学道路与交通工程教育部重点实验室,上海201804;2.上海临港智能网联汽车研究中心有限公司,上海201306;3.交通运输部公路科学研究院,北京100088)
路测(道路测试)是自动驾驶技术迭代成熟和商业化应用的关键环节。近年来,世界各个国家和地区积极推进大规模自动驾驶路测[1]。我国北京、上海等地率先划定自动驾驶测试道路区域,并发放测试牌照[2]。截至2019 年年底,北京市自动驾驶车辆已安全测试达到104万km[3]。
在路测过程中,由于技术成熟度不足,自动驾驶车辆易受多因素干扰发生脱离,严重影响驾驶安全性与舒适性。依据加州机动车管理局的定义,脱离(disengagement)是一种车辆的自动驾驶模式失效行为。当检测到自动驾驶技术故障、车辆存在安全运行需求时,驾驶员(安全员)需切换自动驾驶模式并立即手动接管车辆[4]。按照不同致因脱离可分为被动脱离和主动脱离。被动脱离指受硬件故障、软件失效、天气及路面条件不佳等因素影响,车辆检测到故障无法继续执行,被迫退出自动驾驶模式,要求驾驶员接管[4-7]。主动脱离指车辆未检测到故障,但驾驶员为保证安全或由于车辆不符合人类习惯等因素而采取人工干预,主动触发自动驾驶模式退出。硬件问题、软件能力不足、紧急情况、驾驶员预防性干预等是其主要致因[4-7]。
为了分析自动驾驶车辆脱离带来的影响,文献[8-13]基于驾驶模拟器,分析了不同因素和不同场景对脱离后驾驶员接管效率的影响。如Mok 等[8]、Gold 等[9]、Wan 和 Wu[10]就自动驾驶车辆脱离行为,分析了不同前置时间下驾驶员接管绩效。Zeeb等[11]探讨了车辆处于正常自动驾驶模式时,次任务对接管品质的影响。林庆峰等[12]分析了城市道路环境下高度自动驾驶中非驾驶相关任务和接管紧迫度对接管绩效的影响。钮建伟等[13]分析了前方急刹车、车辆突然插入两种险情下自动驾驶接管行为。文献[7,14]基于实测数据,解析了自动驾驶车辆脱离的原因及其影响。Wang 和Li[7]运用统计建模与分类树等方法定量分析了不同等级自动驾驶车辆的脱离原因,以及不同脱离原因、场景特性对驾驶员接管时间的影响。Boggs 等[14]运用 Logit 模型,从测试位置、脱离原因、测试成熟度三个方面考虑,识别影响自动驾驶车辆脱离的关键因素。
部分机构与学者,构建单次脱离行驶里程(miles per disengagement,MPD)[4]、累积英里脱离率[15]等指标模型,表征路测中自动驾驶车辆的脱离情况。利用自动驾驶路测实际数据,评价测试车辆的驾驶能力。单次脱离行驶里程越大、累积英里脱离率越低,自动驾驶车辆驾驶能力越好。加州《2019年自动驾驶脱离报告》统计结果表明,虽然百度脱离率为18 050mile·次-1(约29 049 km·次-1,1mile=1.609 344 km),位列36家路测企业第一[16],但是提交报告的各个公司对“脱离”的定义却不同。
主动脱离往往由驾驶员经主观判断后决定是否切换自动驾驶模式。在路测中,若驾驶员尚未感知到测试中的碰撞风险,但受个人习惯、测试条件等干扰而进行主动干预,会使原本可以继续安全行驶的自动驾驶车辆主动脱离。这类脱离难以真实反映自动驾驶车辆本身因技术设备、环境适应性等问题出现的自动失效行为。单次脱离行驶里程、累积英里脱离率等指标模型的计算,则未剔除上述主动脱离类型的影响[4,15],使得脱离次数增多。因此,这类评价结果在一定程度上低估了自动驾驶车辆在路测中的真实驾驶能力。此外,路测中,脱离原因及类型等数据的记录还存在准确性不足、数据共享难[2]等问题。因此有必要基于自动驾驶路测实际数据进行脱离类型辨别,反映车辆脱离的真实情况,为当前脱离率模型的优化提供支撑。
本文利用无监督学习中的K-means 聚类算法,辨别避险脱离与非避险脱离,提出优化的自动驾驶路测避险脱离率模型。通过对上海市城市道路和快速路两类场景的路测数据,进行脱离类型的辨别,验证并分析本文提出的避险脱离率模型。
1 自动驾驶车辆脱离类型辨别
1.1 名词定义
(1)非避险脱离:即非避险主动脱离,指在实际路测过程中,驾驶员未感知到碰撞风险,但受个人习惯、测试时间及区域限制等影响进行主动干预,使原本可以继续安全行驶的自动驾驶车辆主动脱离,如图1所示。该类脱离目的并非规避自动驾驶测试过程中的运行安全风险。
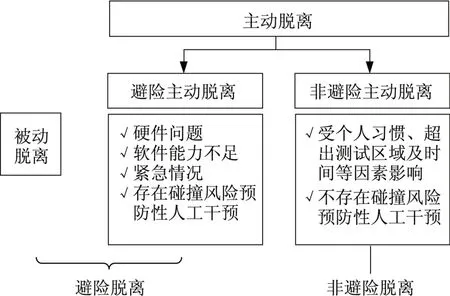
图1 避险脱离与非避险脱离定义Fig.1 Definition of risk-avoiding disengagement and non-risk-avoiding disengagement
(2)避险脱离:包括被动脱离及避险主动脱离。避险主动脱离指在实际路测过程中,受软硬件失效、紧急情况等因素干扰,尽管自动驾驶车辆未检测到异常,但由于存在碰撞风险,驾驶员不得不进行干预而保持安全,使车辆脱离。该类脱离目的是规避自动驾驶测试过程中的运行安全风险。
(3)脱离时长:指在脱离状态下,车辆从脱离时刻开始经历的时长。脱离状态指脱离前车辆从感知故障到脱离、脱离后驾驶员从接管到行驶稳定的全过程。
(4)脱离时长阈值:指在某一脱离时长内,脱离后车辆行为与脱离前相应时长内车辆行为差异最大,该脱离时长即为脱离时长阈值。脱离时长阈值划定了不同脱离类型特性分析的时长范围,可以较显著地反映脱离带来的车辆行为变化,超出脱离时长阈值车辆趋于稳定行驶。
1.2 基本假设
假设1:Morgan等[17]研究了城市道路和郊区道路自动驾驶接管时间,结果表明最长的接管时间(接管发生到驾驶员重新平稳掌控车辆的时间)为15~20 s。因此本文假设脱离时长阈值最大为15 s,即在车辆脱离15 s后驾驶员不受车辆脱离影响,趋于稳定行驶。
假设2:脱离时长阈值最小为3 s,即认为驾驶员至少需3 s以上的时间完成全部的人工干预措施。
假设3:就非避险脱离而言,脱离时刻前后车辆速度差小于避险脱离。避险脱离主要源于设备故障、技术失效、紧急情况等,驾驶员需采取措施规避风险。脱离更具偶然性与随机性。非避险脱离源于驾驶员主观判断与选择,驾驶员规避风险很小,脱离更具可预见性、可操纵性。因此,避险脱离对驾驶员反应时间、接管绩效要求高,安全风险更大。因此,驾驶员会采取更激烈的减速避让措施。
1.3 脱离类型辨别方法
自动驾驶车辆脱离类型辨别主要包括数据预处理、脱离时长阈值确定、脱离类型辨别三部分,总体流程如图2所示。
1.3.1 数据预处理
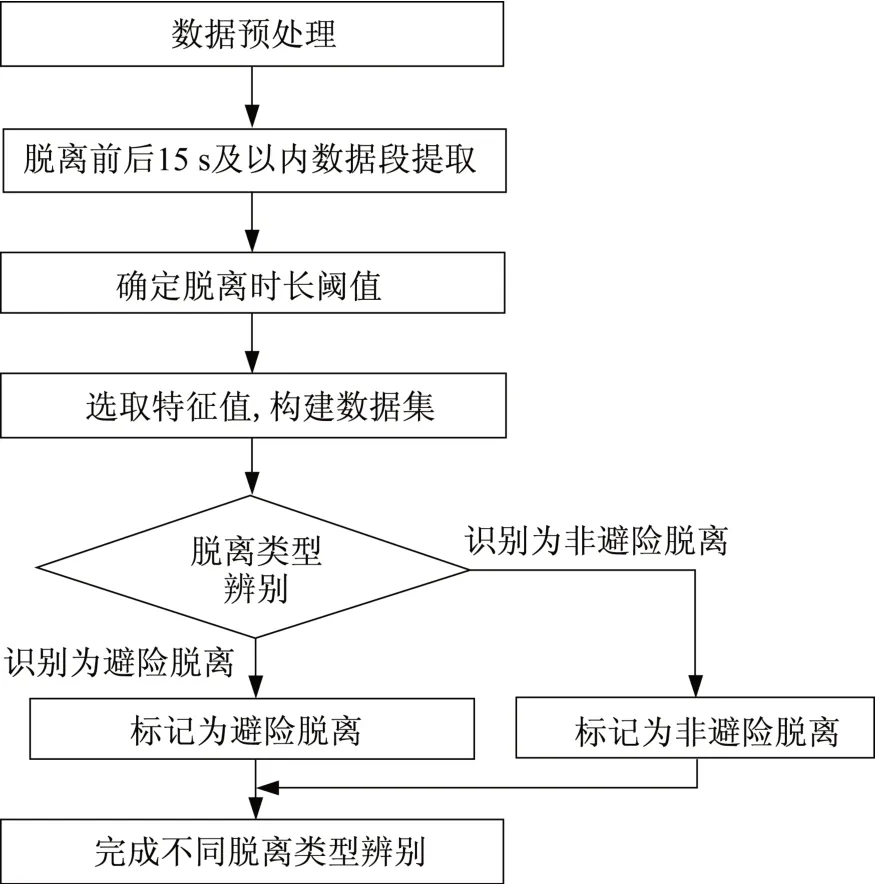
图2 脱离类型辨别流程Fig.2 Process of identification of disengagement types
受设备故障、信号干扰等因素影响,路测实际采集数据存在不同程度的缺失与异常。因此,需清洗异常指标、修复存疑驾驶模式。选取实测数据的车速特征值,基于机器学习的方法辨别存疑的驾驶模式记录数据,进行重新标记与修复。
1.3.2 脱离时长阈值确定
自动驾驶模式转化为人工驾驶模式时,易出现刹车减速情况,前后速度发生变化[18]。在一定脱离时长范围内,驾驶员将不断调整行为来适应脱离带来的影响,但超出一定脱离时长,驾驶员将不受脱离影响而趋于稳定行驶。确定脱离前后车辆行为变化最显著的时间范围,脱离时长阈值,量化脱离造成的影响。根据假设1和假设2,提取脱离前后15 s及以内数据段,按3~15 s 的脱离时长,依次对脱离前后相应时长内(如脱离前3 s、脱离后3 s)瞬时速度进行显著性检验,单位km·h-1。显著性差异最大的脱离时长即为脱离时长阈值。常用的显著性检验方法包括参数检验与非参数检验。在检验前,对车速数据进行正态分布性[19]、方差齐次性[20]检验,依据结果,选取合适的参数检验方法。
1.3.3 脱离类型辨别
脱离时长阈值内,脱离前后车辆行为变化显著。选取合理特征值表征不同脱离类型下的车辆行为,进而辨别不同脱离类型。
(1)特征值选取
自动驾驶车辆脱离前后速度易变化[18]。自动驾驶车辆脱离瞬间,驾驶员需采取人工干预措施。脱离后1 s、脱离后5 s、脱离后10 s 等不同时刻下驾驶行为存在差异,速度往往由波动趋于平稳。考虑脱离时长阈值内脱离前后不同时刻速度变化差异,选取平均速度差(average speed difference,ASD)、瞬时速度差(instantaneous speed difference,ISD)和短时平均速度差(short-term speed difference,SSD)三个特征指标,表征脱离前后驾驶特性变化。

式中:VASD为平均速度差,km·h-1为脱离前a内速度均值,km·h-1:a为脱离时长,s为脱离后a内速度均值,km·h-1。

式中:VISD为瞬时速度差-,km·h-1为脱离前1 s内速度均值,km·h-1;为脱离后 1 s 内速度均值,km·h-1。

式中:VSSD为短时速度差,km·h-1为脱离前a/2内速度均值,km·h-1为脱离后a/2内速度均值,km·h-1。
脱离时长a受脱离时长阈值限制,若a超出脱离时长阈值,则取脱离时长阈值。
平均速度差指脱离时长内前后速度均值差,反映脱离全过程对驾驶特性影响。瞬时速度差指脱离前后1 s速度差,反映脱离瞬间对驾驶特性影响。短时平均速度差指1/2 脱离时长内前后速度均值差,反映自动驾驶车辆脱离后,驾驶员采取人工干预措施的差异。
(2)脱离类型辨别
基于平均速度差、瞬时速度差、短时平均速度差特征值,构建自动驾驶脱离特征数据集。依据脱离特征,利用聚类算法将自动驾驶车辆所有脱离记录分为两种类型。考虑数据结构特性、方法适应性,选取无监督学习中聚类算法[21],进行数据迭代计算,以达到较优聚类效果。根据假设3,特征值较小的一类辨别为非避险脱离,特征值较大的一类辨别为避险脱离。
2 避险脱离率模型构建方法
2.1 模型构建
基于脱离类型的辨别结果,构建避险脱离率(riskavoiding disengagement frequency,RADF)模型。

式中:IRADF为避险脱离率,次·100-1·km-1;IRAD为避险脱离次数(risk-avoiding disengagement),即特定测试区域与测试时期内,自动驾驶车辆避险脱离的总次数,次;M为自动驾驶模式累积行驶里程,即特定测试区域与测试时期内,驾驶模式为自动驾驶的累积行驶里程,km。
2.2 模型应用
避险脱离率模型剔除了自动驾驶车辆非避险脱离对模型评价的影响,可客观量化与表征测试车辆脱离情况。避险脱离率越大,每100 km避险脱离次数越多,驾驶能力越低。实际应用中,基于不同路测数据,选择不同测试区域、时间、车辆,约束脱离次数及累积行驶里程,计算与对比不同维度下的脱离率模型。
3 案例分析
3.1 数据属性
(1)测试场景
数据来源于上海市城市道路、快速路两类场景下采集的自动驾驶车辆测试数据,如图3 和图4 所示。城市道路场景开放性高、限速相对低,受交叉口、非机动车及行人影响较大。快速路场景封闭性高、限速相对高,且在实际测试中自动驾驶车辆前后有警车保护,安全隐患较低。相比城市道路场景,快速路场景复杂度相对简单。
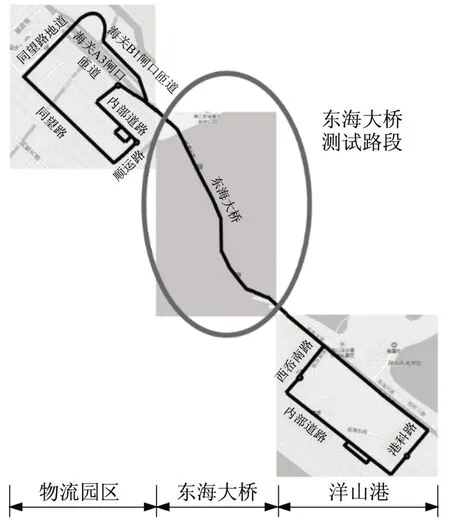
图4 快速路场景示意图(34 km东海大桥段)Fig.4 Expressway scenario (34 kms of East Sea Bridge)
(2)数据情况
数据字段包括车辆编号、经纬度、定位时间、车辆速度、车辆驾驶模式(自动驾驶模式/人工驾驶模式)等字段,时间颗粒度为1 s。选取城市道路场景采集数据约3.3 万条,时间跨度为2018 年8 月至2019 年7 月。快速场景采集数据约53 万条,时间跨度为2019年7月至2019年10月。
3.2 脱离类型辨别
3.2.1 数据预处理
剔除采集数据中速度空值、小于1 km·h-1或大于100 km·h-1速度数据集。依托速度计算加速度、减速度值,若加减速度绝对值大于9.0 m·s-2则剔除。针对采集数据中自动驾驶模式存疑问题,选取平均车速、车速标准差、速度差绝对值平均值、速度差绝对值85 分位值和度差绝对值15 分位值特征指标,优选模式识别算法,构建随机森林性模型进行驾驶模式的辨别与修复。
3.2.2 脱离时长阈值确定
预处理后城市道路场景、快速路场景速度数据经检验未通过正态分布、方差齐次检验。故选择非参数检验中常用的秩和检验进行3~15 s 内脱离前后速度的显著性检验。为了便于绘图比较分析,纵坐标取P值对数,结果如图5和图6所示。
根据显著性检验原理,P值越小则显著性差异越大。图5 城市道路场景中,自动驾驶车辆脱离前后13 s速度差异最显著。图6快速路场景中,自动驾驶车辆脱离前后14 s速度差异最显著。由此确定城市道路、快速路场景自动驾驶脱离时长阈值分别为13、14 s。
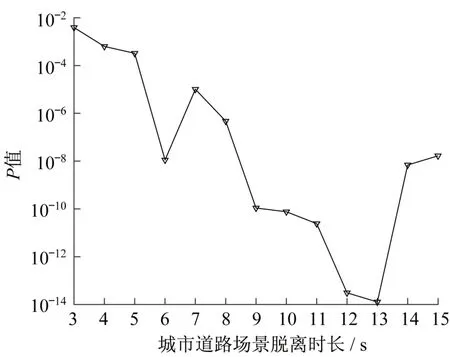
图5 城市道路场景脱离前后速度显著性检验Fig.5 Significant test of speed before and after disengagement in urban road scenario
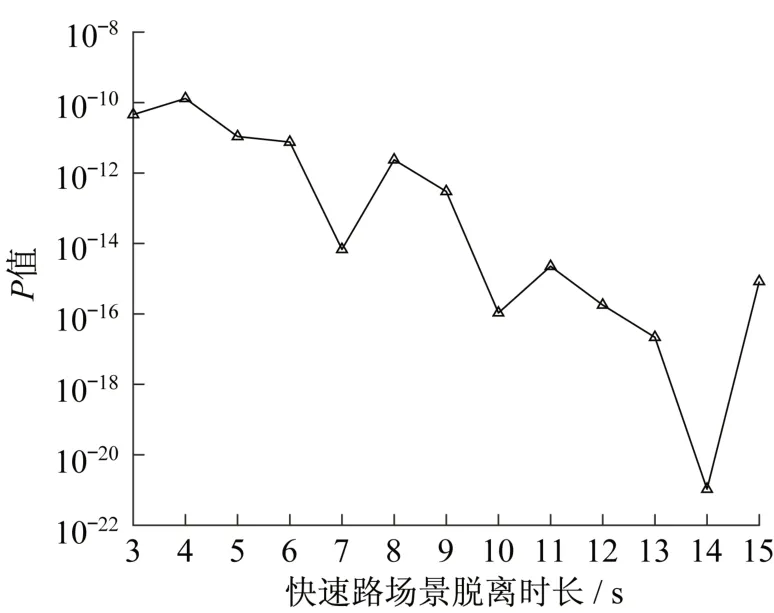
图6 快速路场景脱离前后速度显著性检验Fig.6 Significant test of speed before and after disengagement in expressway scenario
3.2.3 脱离类型辨别
选取平均速度差、瞬时速度差、短时平均速度差三个特征指标,结合数据结构特性,运用无监督学习中K-means聚类方法,对城市道路、快速路场景进行脱离类型的聚类与识别,结果见表1。将三维的空间聚类结果以二维形式展示,如图7和图8所示。

表1 脱离类型辨别Tab.1 Identification of disengagement types次
图7 和图8 结果显示,城市道路场景中,自动驾驶车辆避险脱离次数占总体脱离的32.2%。快速路场景中,自动驾驶车辆避险脱离次数占总体脱离的14.9 %。相比快速路场景,城市道路场景更复杂,易因设备故障、紧急情况产生较大碰撞风险,因此避险脱离占比相对较高。
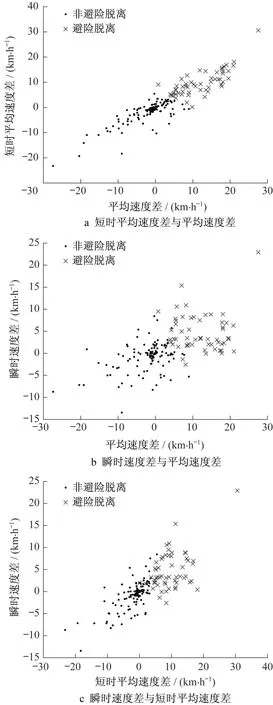
图7 城市道路场景脱离类型辨别(单位:km·h-1)Fig.7 Identification of disengagement types in urban road scenario(unit:km·h-1)
3.3 脱离率模型对比分析
(1) 脱离率模型计算
基于自动驾驶车辆脱离类型辨别结果,约束脱离次数,计算城市道路场景和快速路场景下,所有路测车辆每发生一次脱离时的避险脱离率与传统脱离率。表2给出了两种脱离率模型评价结果对比。表中脱离率指每发生一次脱离时的脱离率。
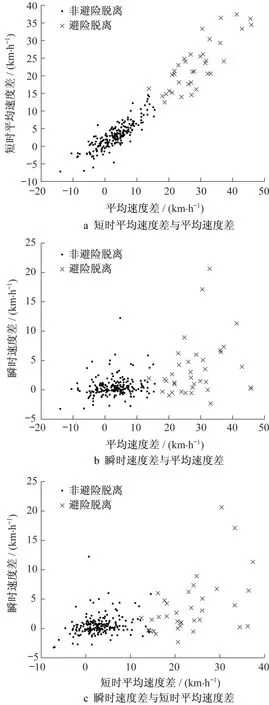
图8 快速路场景脱离类型辨别(单位:km·h-1)Fig.8 Identification of disengagement types in expressway scenario(unit:km·h-1)
(2) 避险脱离率与传统脱离率评价结果对比
传统脱离率模型包括了车辆所有脱离情况。优化后的避险脱离率则剔除了非避险脱离情况。约束脱离次数,对比每发生一次脱离时的避险脱离率与传统脱离率,如表2、图9~图11所示。结果表明,城市道路场景下,避险脱离率15分位数、中位数、85分位数较传统脱离率分别降低58.6%、85.0%、87.9%。以脱离率实际值的倒数表征驾驶能力,自动驾驶车辆驾驶能力平均提升4.8倍。快速路场景下避险脱离率分别降低83.6%、90.4%、88.2%,车辆驾驶能力平均提升7.3倍。基于避险脱离率模型,快速路场景中测试车辆驾驶能力的评价结果更加客观。

表2 两种脱离率模型评价结果对比Tab.2 Comparison between evaluation results of two disengagement frequency models
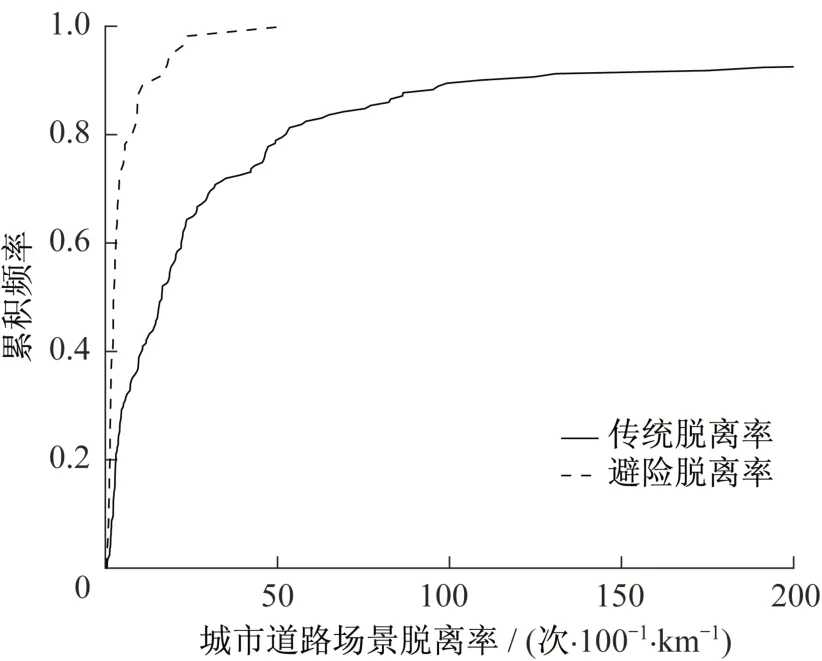
图9 城市道路场景两种脱离率模型评价结果Fig.9 Evaluation results of two types of disengagement frequency model in urban road scenario
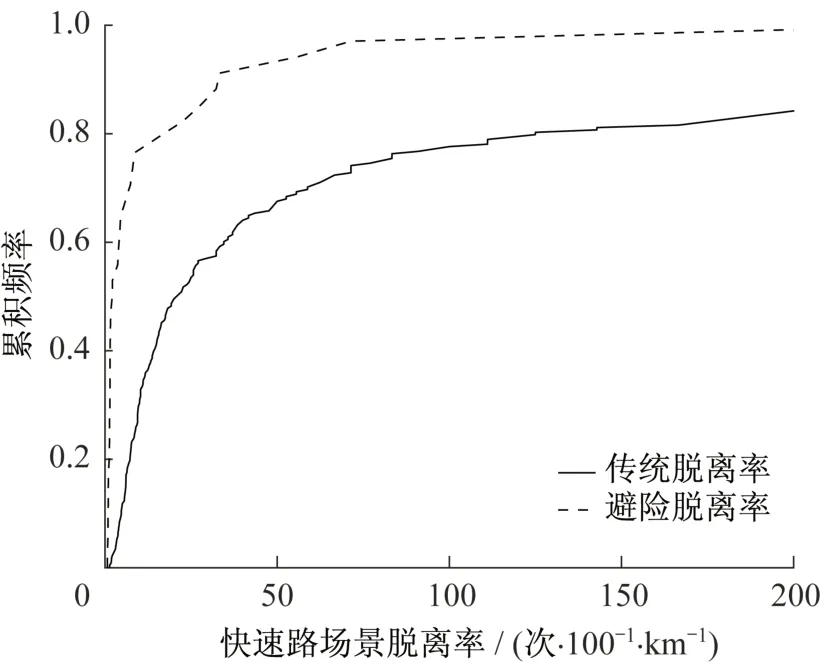
图10 快速路场景两种脱离率模型评价结果Fig.10 Evaluation results of two types of disengagement frequency model in expressway scenario
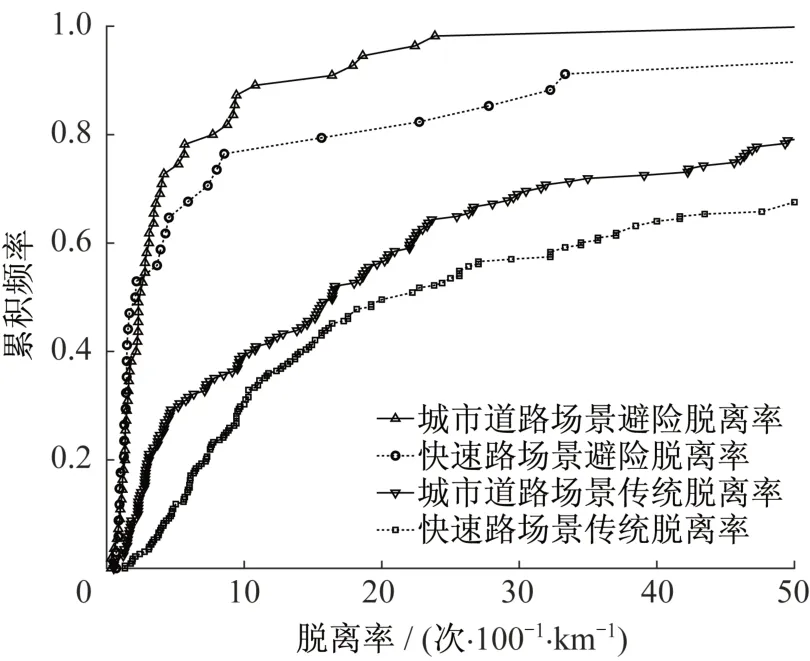
图11 不同场景模型评价结果Fig.11 Evaluation results of two types of disengagement frequency model in two scenarios
如表2、图11所示,快速路场景下传统脱离率15分位数、中位数、85分位数均高于城市道路场景,测试车辆驾驶能力整体表现较差。这主要是因为快速路场景中测试车辆非避险脱离占比较大,如表1所示。模型优化后,快速路场景下避险脱离率15分位数、中位数均低于城市道路场景。这主要是因为实际测试中的快速路场景相对简单,紧急情况发生概率较低。然而,受实际路测情况影响,快速路场景避险脱离率85分位数仍高于城市道路场景,存在个别测试路段发生短时间内车辆避险脱离的情况。这可能与实际测试环境、测试策略、车辆性能相关,后续可结合监控及记录数据开展深入分析。避险脱离率模型在不同场景中评价结果更加客观,剔除驾驶员主观选择的非避险脱离,较为科学合理地反映了车辆真实的驾驶能力。
4 结语
本文在辨别与剔除非避险脱离的基础上,构建了面向自动驾驶路测驾驶能力评估的避险脱离率模型。基于上海市城市道路和快速路场景自动驾驶路测数据,对比分析了不同场景下避险脱离率与传统脱离率模型的评价结果差异。结果表明,与传统脱离率模型相比,避险脱离率模型更具客观性,可在一定程度上解决现有脱离率模型低估测试车辆驾驶能力的现象,具有一定理论与实际应用价值。后续研究中,拓展测试数据来进一步验证模型的合理性,提升脱离类型辨别方法的适应性与高效性。同时,拟补充人工记录的路测脱离原因数据,与模型辨别结果进行比对检验,验证避险脱离率模型的准确性与可靠性。
