考虑换道风险影响的城市快速路出口影响区车道管理
2020-12-18张兰芳钱殷慧杨旻皓
张兰芳,钱殷慧,陆 薇,杨旻皓
(1.同济大学道路与交通工程教育部重点实验室,上海201804;2.国双科技有限公司分析咨询部,上海200040;3.上海市城市建设设计研究总院(集团)有限公司道路与桥梁设计研究院,上海200125)
出匝换道行为引起的交通事故风险是影响城市快速路出口影响区行车安全的重要因素。城市快速路多为八车道或六车道且伴有常态化的交通拥挤,车辆通常无法进行自由换道,驾驶人通常会减速等待换道机会或冒着与周围车辆发生碰撞的高风险而强行挤车换道,确保在出口前完成换道;部分直行车辆会因避免紊流而选择向左侧换道。驾驶人频繁地调整车速和变换车道,造成出口影响区交通流扰动,增加了车辆运行的复杂性和事故风险。合理的车道管理能够规范出匝车辆的换道位置,减少交通冲突,提升通行效率,从而保障出口影响区交通运行的安全有序。因此,深入研究出口影响区内由换道行为引发的事故风险,优化车道管理,对提高城市快速路运行的安全有序具有重要意义。
现阶段出口影响区车道管理的主要手段为设置指示标志、路面标线等。在车道管理方式的研究中,管理手段主要针对于指示标志的设置[1],对标线的研究则相对较少。国外对于标线的研究偏向于材料层面,如标线的反射率[2]和耐久性[3]等指标;国内多集中在减速标线的设计,如减速标线的视认性[4]、材料选取[5]以及参数设计[6]等;少量的研究人员对标志标线的设置位置和布设形式进行了研究[7-9],但这些研究大多基于理论分析,很少考虑换道行为风险的影响。
在换道风险研究方面,自 1986 年 Gipps[10]提出第一个基于规则的换道模型以来,国内外的学者在换道行为特征与模型等方面开展了深入研究。Ahmed 等[11]用数学解析方法建立了换道决策模型;Worrall[12]最早提出了基于马尔可夫链的换道模型;唐阳山等[13]根据车辆实际运行环境,结合各车的初始横向位置,运用Matlab 对不同碰撞临界时间顺序的换道模型危险态势进行了仿真分析。尽管已经开展了大量的换道特征和风险模型研究,但许多研究都集中于城市快速路基本路段[14]、匝道合流区[15]、高速公路[16]等路段,对城市快速路出口影响区的换道风险研究相对较少。
此外,目前用于分析换道行为的数据大多来源于视频录像[17]或模拟驾驶[18],由于实验设备和环境对驾驶人行为的干扰和心理暗示,很难反映实际道路环境下的驾驶行为;研究方法大多基于理论计算[19]或交通仿真[20],交通仿真无法精确再现复杂的交通环境,难以准确地描述不同道路交通状况下出匝车辆多次换道的行为规律。
本文主要基于上海自然驾驶实验(SH-NDS),自然驾驶实验能够在自然状态下(无实验人员出现、无干扰、日常驾驶状态下)不间断地记录驾驶员行为、车辆运行及周边环境信息,实验共采集60 名中等技术驾驶员近三年的全天候近161 055 km的日常驾驶数据,包括驾驶员操作信息、车辆的运动参数信息以及周围车辆和环境信息等。与传统数据采集方法相比,自然驾驶实验采集的是驾驶员日常驾驶行为数据,数据具有真实性、完整性和高效性,是分析换道行为特征和风险研究的有力支撑。
本文基于上海市城市快速路自然驾驶数据,提取出口影响区出匝换道行为样本,建立出口影响区换道风险评价方法及分级标准,分析不同道路交通条件下的换道行车风险,建立换道风险模型,预测一定条件下车辆存在换道风险的概率,基于实际道路交通状况(包括换道车速、周围车辆平均速度、换道持续时间),依据所建立的模型,提出有效的城市快速路出口车道管理方法,从而规范出口影响区驾驶员的换道行为,控制出匝车辆的换道风险,减少由于车辆出匝换道引发的交通拥堵和交通事故。
1 数据采集与提取
1.1 自然驾驶数据采集
自然驾驶数据采集系统集成毫米波雷达、三轴加速度仪、视频采集设备、OBDⅡ标准数据记录仪、全球定位系统(GPS)模块以及各类传感器等,设备功能和精度要求分别见表1和表2,该系统还可以采集和标定多个周围车辆的相对位置、速度等特征。

表2 数据采集标准定义Tab.2 Definition of data acquisition standard
自然驾驶实验的单次出行记录包含实验车辆从点火到熄火全过程的驾驶行为数据,驾驶员按照日常工作生活需求自主选择行驶路线,数据时空分布高度离散且数据样本量极其庞大,需要从庞杂的原始数据中提取出口影响区范围内的出匝换道样本。
采集与提取过程主要分为4步,如图1所示。

图1 数据采集与提取过程Fig.1 Procedure of data collection and extraction
1.2 出匝样本筛选
基于Matlab 编程和Google Earth 路径检索,采用以K近邻算法和轨迹点偏移距离计算为内核的路径匹配方法,筛选出城市快速路出口影响区的记录,排除城市道路、高速公路、城市快速路基本路段的无关数据。
本文针对三种常见的双向八车道城市快速路出口类型(出口形式简写为“a-b+c”,a 表示出口区单向车道数,b表示基本路段单向车道数,c表示匝道车道数):单车道出口(4-4+1),双车道出口(4-4+2)和设辅助车道的双车道出口(5-4+2),分别提取快速路出匝样本,共提取上海市中环路“4-4+1”、“4-4+2”、“5-4+2”出口的出匝换道样本数量各 79、82 和76例。三种类型出口的示意如图2所示。

图2 各类型快速路出口示意图Fig.2 Diagram of each type of expressway off-ramp areas
1.3 单次换道行为识别
在筛选出出匝样本的基础上,需要针对各次出匝过程完成影响区范围内换道行为的识别。换道样本的提取包含两大关键点:①识别目标车辆在出口影响区范围内换道行为的发生;②确定换道实施过程的时空起终点。首先,根据张兰芳等[21]提出的利用车道偏移参数LO指标进行出口换道样本识别;再采用车道偏移参数突变前后斜率为0 的拐点,确定换道实施起点和换道完成终点,而位于其间的车道偏移参数突变点定义为换道中点[22],如图3所示。

图3 换道实施过程时空起终点判断示例Fig.3 An example of temporal and spatial venue of lane-change
1.4 快速路出口换道影响区确定
本文将快速路出口上游段特定范围内车辆换道行为集中的区域定义为出口换道影响区。根据张兰芳等[16]提出的对于多车道高速公路出口影响区具体位置范围的确定方法:首先将所有出匝车辆在不同车道的起始换道位置距出口的距离进行升序排列,并作出相应的累积频率曲线图,如图4所示。其次,根据累积频率图可知,0~85%范围能够表征在不考虑交通状态差异下自然驾驶实验中大多数驾驶员执行出匝换道行为的位置分布,据此定义0~85%分位值区间范围作为出口影响区范围。作出三种类型出口的影响区示意图,如图5所示,图中阴影部分即表示所划定的出口影响区。由图5 可以发现,随着出口的临近,换道影响区域从内侧向外侧车道逐渐扩展;“4-4+2”出口和“4-4+1”出口集中换道区域基本相似,但“4-5+2”出口存在比较大的差异,靠近最右侧辅助车道第4 车道换道影响长度最长,一直扩展到距出口40 m处,部分车辆未利用辅助车道而直接出匝,严重干扰主线交通流,辅助车道分离主线、出匝交通流的作用未完全发挥出来,恰好也说明在正常车道和辅助车道之间的车道管理不够合理。
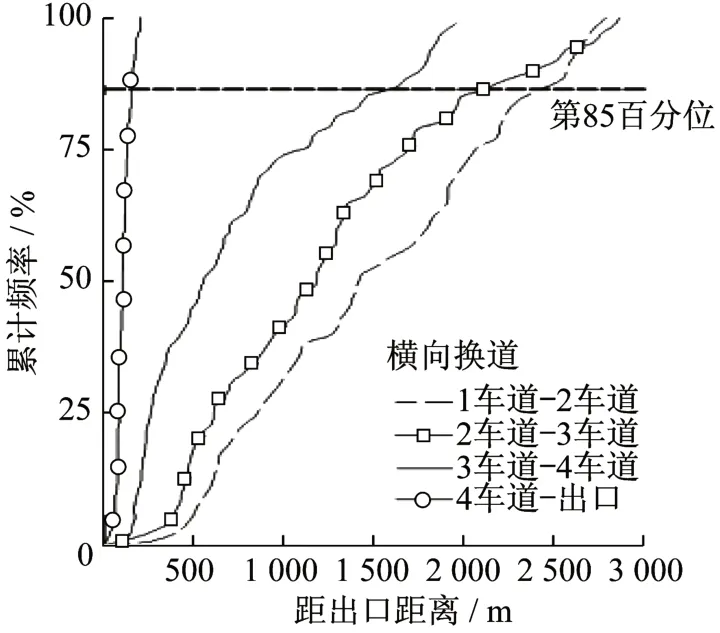
图4 换道影响区范围确定Fig.4 Determination of lane-change affected zone
2 出口影响区单次换道行为风险评价及分级
为了确定快速路出口高风险换道行为的分布,首先要对影响区范围内单次换道行为的安全性进行等级划分。自然驾驶车辆记录了目标车辆、前车和相邻车道车辆的信息,因此本文采用改进的停车视距法,利用目标车辆的换道车速和换道时前车的速度,计算目标车辆相对前车的理论安全距离,分析车辆换道的风险。设反应距离为S1,制动距离为S2,停车视距为ST,具体计算过程为

式中:v1为车辆换道速度,km·h-1;v2为前车速度,km·h-1;φ为路面与轮胎的附着系数,取潮湿的沥青混凝土路面为0.4;ψ为道路阻力系数,取0.03(ψ=f+i,其中f为路面滚动阻力系数,取 0.01;i为最大纵坡,取0.02)。
按照式(1)~(3)计算,可得到目标车辆换道时相对前车的理论安全距离,理想安全距离由理论安全距离加上10 m的安全距离。根据计算结果,将车辆换道风险等级按照:换道时目标车辆与前车距离>理想安全距离、理论安全距离<与前车距离<理想安全距离、与前车距离<理论安全距离,分成A、B、C 三个级别,分别代表低风险、中风险和高风险。等级C 的样本又称为高风险换道样本,对应的换道风险最高。
3 出口影响区换道风险模型
3.1 换道影响因素分析
从人、车、路域环境的角度出发,将影响源分为驾驶员可控因素、其他车辆因素和路域环境因素,评价车辆换道的风险,具体如表3所示。

图5 三种出口换道影响区图示Fig.5 Lane-change affected zones for three types of off-ramps

表3 换道影响因素分类Tab.3 Classification of lane-change influencing factors
3.2 换道样本基本变量
本文针对不同类型的快速路出口、不同横向换道位置,分别建立风险模型。对换道影响因素进行显著性分析和筛选后,确定模型建立所需的自变量为:纵向换道位置(距离出口)x1,m;换道持续时间x2,s;换道前车速x3,km·h-1;换道速度x4,km·h-1;换道后速度x5,km·h-1;周围车辆平均速度x6,km·h-1。因变量为一次换道时发生高风险换道的概率(存在换道风险的概率)。各变量的具体信息如表4所示。
3.3 模型建立
选择采用二项logistic模型建立不同因素影响下的发生风险换道的概率模型,模型表达式可写成式(4)的形式。

表4 自变量集Tab.4 Set of independent variables

式中:自变量x为 3.2 小节中提出的变量x1~x5;w为权重;b为偏置;Y=1指一次换道为高风险换道;P(Y=1)为高风险换道的概率。利用主成分分析和旋转法将6个自变量转换为综合车速变量r1、换道位置变量r2,以及换道持续时间变量r3,三个新成分变量与原始自变量的具体关系如式(5)~(7)所示:

基于赤池信息准则,剔除不显著的变量r3,利用r1、r2两个变量,分别对不同类型的快速路出口、不同横向换道位置的出匝换道样本建立二项logistic 模型,确定不同变量对换道风险的定量影响程度,并预测一次具体的出匝换道过程中,车辆存在换道风险的概率。下面以5-4+2出口横向换道2-3为例,其参数检验结果如表5所示。
由表5可知,r1、r2对出匝车辆存在换道风险的概率影响显著(p<0.05)。换道车速与周围车辆的速度差越大,换道风险越高;纵向换道位置离出口越近,换道风险也相应地越高。

表5 5-4+2出口、横向换道2-3的换道模型参数检验Tab.5 Variable estimations of 2 to 3 lateral position of lane-change model at 5-4+2 off-ramp
将r1、r2分别用原始变量表示,可得到5-4+2 出口、横向换道2-3的换道风险模型,如式(8)所示:

3.4 模型评价
采用第2节中的方法提取不同风险程度的换道样本作为测试集,计算测试样本的换道风险概率,计算得出85%高风险换道样本的换道风险概率大于30%。以30%的换道风险概率判断测试样本的风险等级,正确率最高,故在对测试集样本进行判断时,把换道风险概率大于30%的样本视为高风险换道样本,剩余的样本视为正常换道样本。本文所建立的二项Logistic 模型对测试集样本判断的正确率高于80%,预测精度很高。如图6所示,由受试者工作特征曲线(receiver operator characteristic curve,ROC)计算得到的5-4+2 出口、各横向换道位置对应的ROC 曲线下的面积(AUC)值均大于0.6,表示本文所建立的换道风险模型泛化能力相对较好,具有一定的预测价值,可以为城市快速路的车道管理提供有效的理论支撑。
4 车道管理方法
由第3 节分析可得,纵向换道位置和换道车速是影响城市快速路出口影响区换道风险的两个主要因素,而针对个体车辆的换道车速调控较难实现,因此,本文的车道管理方法主要是先基于出口影响区的车辆运行信息和换道风险模型,确定出匝车辆的合理换道位置,再结合其现状的车道管理,给出车道管理的具体改善方法。下面以5-4+2出口为例进行说明。

图6 模型评价ROC图Fig.6 ROC evaluation
4.1 合理(最迟)纵向换道位置的确定
根据3.3 节建立的换道风险模型,若确定车辆的换道风险控制水平,在假定各变量取值的前提下,可推算出不同交通环境和车速条件下,在不同横向车道上的车辆纵向换道位置参考值。车辆在此纵向位置前换道,发生换道风险的概率比较低,因此,也可称为合理(最迟)换道位置。下面以5-4+2 出口,横向换道2-3 为例,最迟换道位置计算公式如式(9)所示。式中,logit是指使用二项Logistic模型反解出对应不同的因变量的自变量的取值范围。

3.4节分析中将换道风险概率大于30%的样本视为高风险换道样本,为保证车辆换道的安全性,本文将车辆的换道风险控制在10%以内,故P(Y=1)取10%。假定换道持续时间x2取6 s(自然驾驶样本中,车辆进行换道的持续时间的中位数为6 s);考虑到工程运用的方便性,假设换道前车速x3、换道车速x4、换道后车速x5三者数值相同,均取为换道车速值(换道车速比其他两种速度值大,换道风险也相对更大,按换道车速计算,符合实际的安全需求)。当换道车速x4和周围车辆平均车速x6的取值确定时,可计算不同横向换道的最迟换道位置,如式(10)所示:

然而,在实际应用中,快速路出口影响区的车辆运行数据往往不能快速、完整地获得,因此,本文针对三种车辆运行数据获取情况,分别提出车辆最迟换道位置的计算方法:①可获得具体车辆运行状态和交通流状态数据的快速路出口影响区;②仅可获得断面平均车速的快速路出口影响区;③未有车辆运行相关信息的新建快速路出口影响区。
第①种情况可按式(10)计算出车辆在不同横向换道时的纵向最迟换道位置;第②种情况可利用式(10)分别计算各类型出口、各横向换道、不同交通拥挤程度(不同周围车辆车速范围)下的安全换道样本的最迟换道位置,并取第15%(按照到出口的距离由大到小的顺序排序)的换道位置作为该交通环境下的最迟换道位置。以5-4+2 出口在畅通条件下(周围平均车速>78 km·h-1),横向换道2-3、3-4 和4-5/6为例,计算结果如表6所示。
对于第③种情况,可根据《城市道路工程设计规范》[23],由新建城市快速路的服务水平查到对应的平均车速,作为出口影响区的断面平均车速,后续步骤参考第②种情况。表7 是设计时速为80 km·h-1,道路服务水平为三级的城市快速路上,5-4+2 出口各横向换道的纵向最迟换道位置。

表6 5-4+2 出口各横向换道的最迟换道位置(基于断面平均车速)Tab.6 Latest lane-change positions at different lateral positions of 5-4+2 off-ramp(based on sectional average speed)

表7 5-4+2 出口各横向换道的最迟换道位置(基于服务水平等级)Tab.7 Latest lane-change positions at different lateral positions of 5-4+2 off-ramp(based on level of service)
4.2 基于最迟换道位置的车道管理方法
基于4.1 计算得到的车辆最迟换道位置,下面将从车道分界线的设置、出口引导标志的设立和驾驶员个性化服务三个方面提出车道管理方法,对驾驶员的换道位置进行管理,如图7 所示。图中,①~③表示4.1节中三种车辆运行数据获取情况。

图7 基于换道风险模型的换道位置管理方法流程Fig.7 Flowchart of management methods of lane-change position based on lane-change risk model
最迟换道位置能够为城市快速路出口的车道分界线的设置提供依据:将最迟换道位置到出口鼻端之间的车道分界线设置为实线;最迟换道位置之前的可换道区域的车道分界线设置为虚线。
对于多车道快速路,为确保车辆在出口前及时换道,可在最迟换道位置前的道路左侧设立悬臂式或门架式出口引导标志,提醒驾驶员及时进行换道。
近几年智能交通技术的逐渐成熟,未来基于换道位置的管理方法还可以为车辆驾驶员提供个性化的服务,通过车路信息的实时交互,车载设备可提醒驾驶员在合理的位置进行换道,更具有及时性和针对性。
5 结论
本文基于自然驾驶数据提取了三种常见出口类型的城市快速路出匝换道行为样本,提出了出匝换道风险分级方法,建立了二项Logistic换道风险的概率模型,解析了各因素对换道风险的定量影响程度;在该模型基础上,以5-4+2出口为例,提出了基于换道位置的具体车道管理方法。论文所提出的换道风险模型和车道管理方法适用不同的快速路出口类型和横向换道位置,具有实用性和针对性。
由于论文研究采用的数据源于往期自然驾驶实验,数据样本有限,后期可进一步扩展数据样本,优化换道风险模型的精度和可移植性。另外交通是一个动态变化的过程,未来利用智能交通对道路进行更有针对性的动态车道管理,设置可变的标线、标志牌,也是今后研究的方向。
