配备GPS/INS组合导航系统的无人机诱捕方法
2020-12-16王文益
王文益,陈 晨
(中国民航大学天津市智能信号与图像处理重点实验室, 天津 300300)
近年来无人机技术发展迅速,在民用和军用领域发挥着举足轻重的作用,然而无人机威胁公共交通安全尤其是民航安全的事情时有发生[1],针对无人机使用的监管以及无人机的反制成为了研究的热点。世界各个国家现有的反制无人机的手段在种类、技术路线上存在着差异。目前主要被采用的技术有摧毁捕获[2]、干扰阻断[3]、检测控制[4]等。
随着GPS的广泛应用,GPS导航已成为军、民设备的主要导航方式。对于无人机导航系统来说GPS导航是其必不可少的一部分,但是由于GPS信号到达地面时极其微弱且民用信号结构公开,极容易受到有意、无意的各种干扰[5],其中以欺骗式干扰为主。惯性导航系统也是一种得到广泛应用的导航系统,它具有隐蔽性、独立性以及抗干扰的优点,但误差会随着时间累加[6]。GPS系统与INS系统在独立运行时有着各自的缺点,为了解决这个问题,无人机大多采用GPS/INS组合导航系统。组合导航系统有以下2个优势[7]:第一,INS利用其短时间内精度高的特点可以在 GPS 信号弱或受屏蔽情况下为无人机提供持续的导航功能。第二,有效的 GPS 信号可作为INS的参考,并对其进行修正。近些年,无人机导航系统的干扰问题已经成为热点。文献[8]针对无人机上行通信链路,建立了转发干扰模型,但无人机的通信链路多采用跳频通信,在不了解无人机通信频率跳变规律的情况下,简单的转发式干扰很难控制无人机的通信链路,相比较而言,从无人机的GPS信号入手,更容易反制无人机。文献[9]通过调整不同支路卫星信号的时延来实现对目标位置欺骗,但是并未讨论时延取值的约束条件。文献[10]通过生成欺骗式GPS信号,对采用民用无人机进行了干扰实验,成功干扰了无人机GPS接收机的定位结果,但是对于采用GPS/INS复合导航系统的无人机来说,它拥有干扰检测的能力,它检测到GPS定位结果异常后会放弃采用该定位结果。
本文在研究GPS欺骗式干扰和无人机复合导航系统的基础上,根据无人机与控制者的通信链路被切断后,无人机的飞行方向始终朝向返航点的特点,发送欺骗信号将无人机的定位结果偏移到指定位置,无人机即会朝向目的诱捕位置飞去。由于无人机的GPS/INS复合导航系统具有干扰检测的能力,针对诱捕过程中的隐蔽性要求,本文进行了NIS检测试验,分析了欺骗距离和GPS接收机定位精度对隐蔽性的影响,最后通过仿真验证了该方法的可用性和隐蔽性。
1 GPS欺骗原理
GPS的定位原理是利用伪距定位,即GPS信号从卫星到接收机的传输时间乘以光速就即是接收机到卫星的距离[11],由于卫星和接收机的时钟都有时钟偏移,因此该距离又被称为伪距。而由于位置信息是三维的,而且卫星与接收机的时钟偏移,因此至少需要四颗卫星才能解算出接收机的三维位置信息。
如图1所示,A代表欺骗设备,B代表目标无人机。欺骗设备A接收真实卫星信号后,然后根据A与B的相对位置和无人机期望被欺骗到的位置计算得到各卫星支路需要添加的时延,随后欺骗设备A根据计算得到的时延,调整卫星信号加大功率转发给B,令B定位到欺骗位置C。
设欺骗设备A的坐标为(xA,yA,zA),无人机B的坐标为(xB,yB,zB),目的欺骗位置C的坐标为(xC,yC,zC),第i颗GPS卫星的坐标为(xi,yi,zi),即第i颗GPS卫星到欺骗设备A的伪距为:
(1)

第i颗GPS卫星到无人机B以及预期欺骗位置C的伪距为:
(2)
(3)
若要使无人机定位结果定位偏移到C点,通过欺骗设备A转发各支路GPS卫星信号所需的时延为[12]:
(4)
调整时延后欺骗信号被GPS接收机接收以后,会改变GPS接收机的定位位置,使其偏离目标接收机真实位置,记改变之后的定位位置与真实位置之间距离偏差为Δp,把这个距离偏差定义为欺骗距离。在实际应用中,时延的取值应该为正数,若计算出来的时延有负值,可以将各卫星支路的时延同时加上相同的数值,从而使各卫星支路的时延都是正值。

图1 位置欺骗原理示意图
2 无人机组合导航系统
无人机大多配备GPS/INS组合导航系统,而且从GPS和INS中解算出来的导航信息有时候并不可靠,无人机的组合导航系统会将GPS和INS的输出信息利用有效的信息融合方法进行融合,进而得到一个精度更高的导航信息。由于融合得到的组合导航信息融合了GPS信息,因此无人机可以通过组合导航输出信息来判断是受到GPS干扰。
2.1 数据融合
数据融合的方法有很多,如卡尔曼滤波、最小二乘法、维纳滤波等。在组合导航中,广泛采用卡尔曼滤波进行数据融合[13],原理如图2所示。

(5a)
P(k/k-1)=AP(k-1/k-1)AT+GQ(k-1)GT
(5b)
K(k)=P(k/k-1)HT[HP(k/k-1)HT+R]-1
(5c)

(5d)
P(k/k)=P(k/k-1)-K(k)HP(k/k-1)
(5e)
式(5a)、式(5b)为卡尔曼滤波的预测阶段,其中式(5a)为状态转移公式,它表示如何根据上一时刻的状态推测出当前时刻的状态,式(5b)表示协方差更新公式。式(5c)-式(5e)表示卡尔曼滤波的修正阶段,最后用K以及式(5d)、式(5e)完成协方差和状态量的修正,完成卡尔曼滤波过程,得到与GPS输出和INS输出相比更接近真实值的滤波输出。

图2 GPS/INS组合导航原理框图
2.2 NIS检测
对于诱捕无人机来说,需要考虑欺骗的隐蔽问题。对于采用GPS/INS组合导航系统的无人机来说,它在估计自身位置的时,不仅只依靠GPS,而是将从GPS解算出来的位置信息与从INS得到的位置信息进行融合得到一个更加接近自身真实位置的位置信息。组合导航系统会“监督”GPS,当从GPS解算出来的位置信息与无人机根据上一时刻预估得到的当前时刻的位置信息相差过大时,无人机会“怀疑”GPS信号已经受到了欺骗。为此我们用NIS[14]来表示无人机的抗干扰检测能力,定义为:
NIS(k)=(z(k)-Hx(k))TS(k)-1(z(k)-Hx(k))
(6)
式(6)中:z(k)为k时刻UAV状态的观测值;Hx(k)为滤波过程中根据k-1时刻以及其过去时刻对当前时刻观测值的预测;z(k)-Hx(k)为k时刻的观测值提供的新息;S(k)即为预测误差协方差矩阵,可以表示为:
S(k)=HP(k|k-1)HT+R
(7)
在没有欺骗的情况下NIS会满足自由度为2的卡方分布,根据分布表可知,自由度为2的99% (α=0.01)的置信区间为[0,9.21],即当NIS值大于9.21时,无人机会认为自己受到了欺骗,并会摒弃GPS定位结果。
由上面分析可知,NIS是一个复杂的变量,NIS值不仅与欺骗距离有关,还与GPS定位精度有关。为了精确分析GPS定位精度和欺骗距离对诱捕过程中NIS值的影响,本文采取仿真实验,分别将GPS定位精度、欺骗距离两者之一设为固定值,改变另一变量,观察NIS值的变化趋势。具体结果如图3、图4所示。

图3 GPS量测误差为100 m时的NIS值变化曲线
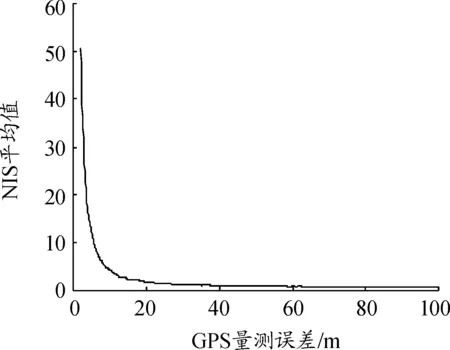
图4 欺骗距离为100 m时的NIS值变化曲线
首先将GPS东北天方向量测误差均方差都设为100 m,此时不断增大欺骗距离,观察NIS值的变化趋势,通过图3可以发现:在GPS东北天方向量测误差固定不变时,随着欺骗距离的增大,NIS平均值也有增大的趋势,所以可以这样说, NIS值与欺骗距离成正比,即随着欺骗距离增大,诱捕被无人机检测到的风险越随之变大。
其次将诱捕过程中的欺骗距离固定为100 m,改变无人机定位精度,观察NIS值的变化趋势。通过图4可以发现:在欺骗距离固定为100 m时,随着GPS量测误差变小,NIS值呈指数级上升,即随着无人机的GPS定位精度的提高,诱捕无人机的难度指数级上升。
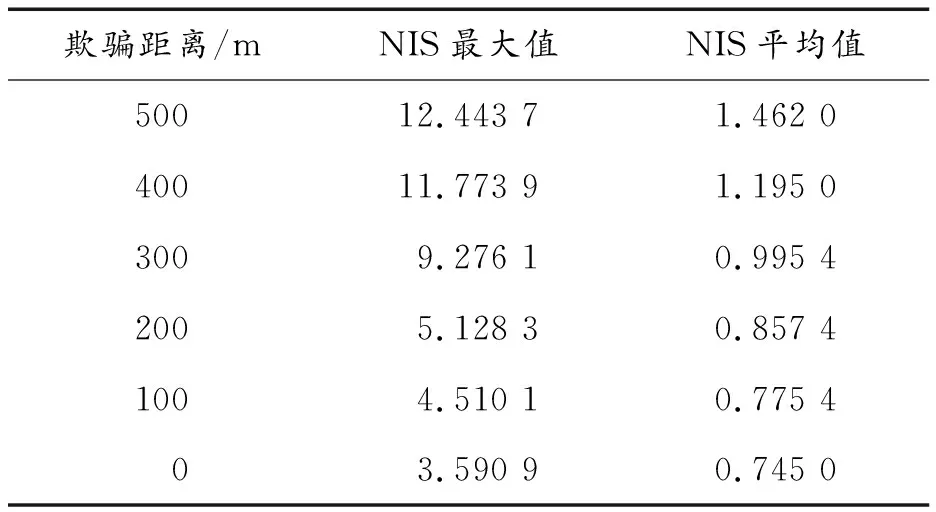
表1 GPS量测误差100 m时的NIS值
通过表1可以得到:想要诱捕在GPS量测误差均方差为100 m的无人机,欺骗距离不得超过300 m,否则会有被无人机检测到的风险。
3 诱捕策略
3.1 诱捕步骤
诱捕无人机流程如图5所示,诱捕无人机的步骤如下:
步骤1发送宽带阻塞式干扰信号来切断无人机与控制者之间的通信链路,迫使无人机进入返航状态(本文假设无人机在被切断与控制者之间的通信链路后,会直线飞回返航点)。无人机的通信链路可以分为上行控制链路和下行图传链路两部分而且通信频率集中在2.4 GHz和5.8 GHz[15],因此阻塞信号的频带必须覆盖2.4 GHz和5.8 GHz。
步骤2发送压制式GPS干扰信号,使GPS接收机失锁。改变各支路卫星的时延生成欺骗式GPS信号(欺骗信号功率比真实信号高)控制无人机的跟踪环路,使得接收机接收欺骗式GPS信号进行定位解算,由于无人机飞行方向始终朝向返航点,所以无人机的飞行轨迹会发生变化,根据无人机在被欺骗前后的飞行轨迹变化,计算出无人机返航点的位置信息。
步骤3根据上一步计算得到的无人机返航位置和预期诱骗位置,计算要将无人机的定位结果偏移到什么位置,无人机会改变飞行方向朝诱捕位置飞行。根据计算得到的欺骗位置,发送欺骗式GPS信号,改变无人机的定位结果,改变无人机的飞行轨迹,让其朝向目的诱骗位置飞行。
步骤4通过雷达观察无人机是否朝向预期诱捕位置的方向飞行,若无人机朝向预期诱骗位置的方向飞行,则让无人机按当前的飞行轨迹继续飞行,若无人机没有朝向预期诱捕位置的方向飞行,则修正欺骗信号,改变无人机的飞行方向,让其朝向预期诱捕位置飞行。
步骤5重复步骤4,直到无人机飞到诱捕位置。

图5 诱捕无人机流程框图
3.2 计算返航点和欺骗位置
无人机在被切断与控制者之间的通信链路后会触发失控返航功能,不同种类的无人机返航方式存在差异,但市场上大部分无人机的失控返航方式为直线飞回返航点。以大疆的Mavic Mini为例,它的返航方式为:若当前高度高于20 m,原地调转机头直线朝向返航点飞去,若当前高度低于20 m,会先上升到20 m高度再原地调转机头直线朝向返航点飞去。
无人机的位置、速度等状态信息可以通过雷达探测得到,但是我们无法直接得到无人机返航点的位置信息。而且无人机返航点的位置信息对于我们制定欺骗策略是必不可少的,因此本文提出了一种方法来估算无人机返航点的位置信息。
如图6所示,A是无人机的真实位置,D是无人机的返航位置,位置坐标未知,AD是无人机受到欺骗前的飞行方向。无人机接收欺骗信号后,定位结果偏移到B点,由于无人机的目的位置始终是D,所以无人机会改变自己的飞行方向,此时通过雷达探测到无人机的飞行方向变成了AM方向。从欺骗位置B沿与AC平行的方向做直线,并与无人机受到欺骗前的飞行方向AD相交于D点,D点就是返航点。设A点的坐标为(xA,yA),B点的坐标为(xB,yB),直线AD的斜率为k1,直线AM的斜率为k2。则D点的坐标为:
xD=(k1xA-k2xB-yA+yB)/(k1-k2)
(8)
yD=(k1k2xB-k1k2xA+k2yA-k1yB)/(k1-k2)
追求灵魂的光明(吴语) ................................................................................................................................1-48
(9)
根据上文得到出无人机返航点的位置和目的诱骗位置,可以计算出欺骗位置(将无人机的定位结果欺骗至该位置后,无人机将调整自己的飞行方向,朝向目的诱骗位置飞行)。

图6 计算返航点和欺骗位置示意图
为了减少篇幅,仍用图6说明计算过程,此时无人机的真实位置A,返航点位置D,目的诱捕位置M的坐标信息已知。大圆形区域为雷达的监管区域。无人机此时的飞行方向是AD。发送欺骗式GPS干扰信号,让无人机误认为自己的真实位置是B点(B是与AM平行的直线BD上的任意一点),这样无人机就会沿着AM方向飞行至预期诱捕位置M,由于无人机GPS接收机的定位误差、雷达探测误差、无人机复合导航系统输出的定位结果和GPS不一致等原因,无人机最终被诱捕至的位置会和预期诱捕位置有出入。
理论上当将无人机的定位结果欺骗至直线BD上任意一点时,由于无人机的目的地是返航点,无人机都会沿AM方向朝向诱捕位置飞去。但是在实际情况中,欺骗距离越大,诱捕被无人机检测到的概率就越高,因此我们将欺骗位置设在距离无人机真实位置最近的S点。记M点的坐标为(xM,yM),直线AM的斜率为k,则S点的坐标为:
k=(yM-yA)/(xM-xA)
(10)
yS=[(xA-xD)k+yAk2+yD]/(1+k2)
(11)
xS=[(yA-yD)k+xDk2+xA]/(1+k2)
(12)
4 仿真实验
假设无人机从当前位置(N32°,E118°)沿直线飞回返航点(N31.9567°,E117.9171°),东、北方向速度分别为100 m/s、60 m/s,预期诱捕位置为(N31.9°,E117.9°)。无人机的复合导航方式是松耦合,GPS观测误差标准差为100 m,陀螺仪漂移误差为0.09 (°)/h,加速度计零偏为10 mg,雷达的探测周期是1 s,仿真过程持续80 s。前20 s,利用雷达跟踪并记录无人机的飞行轨迹,第20 s发送压制式GPS信号使得无人机GPS接收机失锁,再调整各支路卫星信号时延,发送欺骗式GPS干扰信号捕获无人机GPS接收机的跟踪环路,将无人机定位结果偏移到(N31.99°,E117.9907°),此时无人机的飞行轨迹会发生改变,利用雷达记录改变后的飞行轨迹,根据无人机在第20 s到第25 s的飞行轨迹和前20 s的飞行轨迹,计算得到无人机返航点的位置信息。第26秒,根据预期诱捕位置和返航点位置,发送欺骗式GPS干扰信号使无人机的定位结果偏移到(N31.9629825°,E117.9787369°),无人机的飞行方向再次发生改变,朝向诱捕位置飞去,第80 s无人机飞至诱捕位置。无人机飞行轨迹图如图7。诱捕结果统计如表2所示。

图7 无人机飞行轨迹图

表2 诱捕结果统计
图7中,无人机接收欺骗式GPS信号解算出错误的定位结果,将这些定位结果连接起来所形成的飞行轨迹为欺骗轨迹;预期飞行轨迹是理想情况下无人机在欺骗式GPS干扰信号的控制下的飞行轨迹,是诱捕方希望无人机受到控制后的最理想的飞行轨迹,无人机预期飞行轨迹的最终位置是预期诱捕位置;在实际情况中由于GPS定位误差以及无人机复合导航系统的定位结果和GPS定位结果不一致,导致无人机的真实飞行轨迹和预期飞行估计不完全重合,造成实际无人机被诱骗至的位置和目的诱捕位置有出入。在表2中可以看到,无人机最终被诱骗至(N31.8998°,E117.8997°),与预期诱捕位置十分接近。
诱捕无人机还需要考虑隐蔽性问题。在此引入第2节提到的NIS检测来分析诱捕过程中的隐蔽性问题,在没有欺骗的情况下,NIS值满足自由度为2的卡方分布,NIS值一旦超过9.21,无人机会认为自己受到了欺骗。由第2节可知,针对GPS定位精度为100 m的无人机,诱捕过程中的欺骗距离不得超过300 m。图8为诱捕过程中欺骗距离变化曲线,由图8可以看到,在第26 s时,欺骗距离最大,为259 m,没有超过300 m,满足了第2节提出的想要诱捕GPS接收机定位精度为100 m的无人机对欺骗距离的要求。

图8 诱捕过程中的欺骗距离变化曲线

表3 诱捕过程中NIS数值统计
为了进一步分析诱捕过程中的隐蔽性问题,图9给出了诱捕过程中的NIS值的变化曲线,对其利用MATLAB画图工具中Data Statistics进行数值分析,统计结果如表3所示,可知在诱捕过程中NIS值的最大值为4.405小于9.21,无人机没有察觉到自身受到了欺骗,满足了隐蔽性要求。
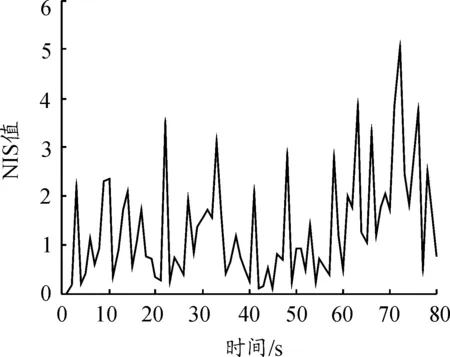
图9 诱捕过程中的NIS值变化曲线
5 结论
针对配备GPS/INS组合导航系统的无人机,根据其直线飞回返航点的特点,设计了一种诱捕方法,通过理论分析和仿真实验得到了以下结果:
1) 仿真实验与理论分析结果基本一致,在不被无人机发觉的情况下无人机成功被诱骗至诱捕位置附近。
2) 无人机的GPS接收机定位精度越高,诱捕难度越高。在诱捕过程中,欺骗位置与无人机的真实位置越近,被无人机发现的概率越低。
3) 研究结果对于诱捕采用非直线返航方式的无人机以及配备GPS/INS组合导航系统的其他设备具有借鉴意义。