六行手扶式大蒜播种机设计与试验
2020-12-15张耘祎张飞崔军王成文李想
张耘祎 张飞 崔军 王成文 李想
0 引言
大蒜是劳动密集型栽培作物,主要种植流程包括整地、开沟、播种、覆膜、田间管理、抽薹、收获等[1],播种是其中的重要环节。由于缺乏实用的大蒜种植机械,大蒜播种目前主要依靠人工完成。人工作业存在劳动强度大、占用农时多、生产效率低等问题,制约了大蒜产业的发展。在田块规模不大、仍以个体种植为主的地区,研发推广适应农艺要求的大蒜种植机械对推进大蒜生产机械化具有重要意义。本项目提供了一种液压传动、前后轮同时驱动、带有株距变速箱的六行手扶式大蒜播种机,并获得实用新型专利。该机结构简单、小巧灵活、价格较低,能实现单粒取蒜,播深稳定,播种效率高。与人工作业相比,可降低劳动强度,提高作业效率,增加农民收入。
1 大蒜播种机研发现状
大蒜播种属于精量播种范畴,目前研究热点在单粒播种和蒜瓣种植后的定向两大方面。国外大蒜播种机的单粒取种方式主要为机械式取种,有窝眼轮式、勺带式、夹持式、勺链式、转勺式及振动式等[2]。国外大蒜种植机的特点是开沟之后散播,基本可实现单粒排种、大面积机械种植,但控制不了蒜瓣种植后的蒜瓣定向问题。我国大蒜播种机单粒取种方式主要分为机械式和气力式。机械式取种除上述取种方式外,还有锥盘式、旋转式、转筒式及链勺式;气力式取种方式主要为气吸式。定向研究方面具有代表性的是中国农业机械化科学研究院及有关单位联合研制开发的自走式五行大蒜种植机,该机可实现种植时的自动喂料、蒜种落下时的瓣尖向上控制等功能,虽在技术上取得了一定进步,但也存在一些问题,仍有需进一步改进和完善的地方,因而亦未能推广应用。目前,已有的大蒜种植机械要么体积庞大需要与拖拉机联合使用,要么转弯半径大,操作困难,国内尚没有实用且大面积推广的大蒜种植机械。
2 六行手扶式大蒜播种机基本结构及工作原理
2.1 整体结构
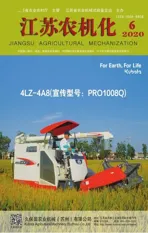
六行手扶式大蒜播种机由车架、栅条滚子、扶手、后行走总成、种仓、播种总成、开沟器、转向总成、划行器和动力系统等构成。详见图1。各部分连接关系如下:车架由两道相互平行的底梁组成,其前端连接有栅条滚子,作为前驱动轮;后端固连有扶手,并安装后行走总成。车架靠近扶手一侧的上部设置种仓,种仓内设有播种总成。播种总成包括取种装置、排种管和株距变速箱。取种装置安装于种仓内,种仓的外部对应取种装置,设置有排种管。排种管的顶部位于种仓的一侧,设有开口,承接取种装置取上来的蒜种,底端位于开沟器的后方。株距变速箱与取种装置传动连接。开沟器安装于车架下部,位于前驱动轮的后方。车架的中部安装有转向总成,转向总成能够将大蒜播种机整机向上顶起,实现转向。车架至少一侧安装有划行器。播种总成、后行走总成以及转向总成均与动力系统连接。
2.2 工作原理
图1 六行手扶式大蒜播种机结构图
该机使用时,将蒜种放置在种箱内,由动力装置带动大蒜播种机行走,接地轮带动齿轮旋转,在传动链条的作用下,锥形轮与齿轮同步旋转,锥形轮带动传送器输送蒜种,对蒜种实施种植。该机具有以下特点:
1)行走驱动轮采用外圆开放式栅格结构,在松软的土地上能够产生更大的驱动力;
2)播种行数设定为六行,方便与大蒜联合收获机收获要求相适应;
3)在播种机中部安装一个液压升降机构,当需要转向掉头时,液压升降机构将整机顶起,用手转动整机掉头,转弯半径小,转弯方便;
4)配备划行器,保证播种行距均匀一致,方便后续的田间管理和收获;
5)配备多档位株距变速箱,用于控制播种株距的大小。
2.3 基本参数
1)外形尺寸(长×宽×高):132 cm×137 cm×104 cm;
2)配套动力:190 汽油机(8.2 kW);
3)挂接形式:自走式;
4)作业幅宽:120 cm;
5)作业行数:6 行;
6)作业行距:20 cm;
7)株距:6~8 株/m(可调)。
3 田间试验
3.1 试验条件
1)试验时间:2018 年 9 月 27 日;
2)试验地点:江苏省徐州市丰县首羡镇穆庄;
3)大蒜品种:徐州白蒜,蒜种最宽处的宽度在13 ~25 mm,大小均匀;
4)试验地块:作业地块测定区长100 m、宽40 m,两端预备区长20 m,沿测试地块的长度和宽度中点连十字线,将地块划分为4 块,随机抽取对角的2 块作为检测样本;
5)土壤类型:沙壤土,含水率为24.9%,土壤硬度24.5 kPa。
试验条件符合机械播种作业要求。将用于试验的大蒜播种机按规定调整至最佳技术状态,设定株距为15 cm。
3.2 试验内容
测试机具的性能指标尤其是与播种质量密切相关的5 个指标(种子机械破损率、空穴率、重播率、穴距合格率、播种深度合格率)能否达到设计要求。目前,我国还没有针对大蒜播种装备的技术标准,试验方法主要参考JB/T 10293-2001《单粒(精密)播种机技术条件》、GB/T 6973-2005《单粒(精密)播种机试验方法》以及相关农艺要求。
3.3 试验结果分析
3.3.1 试验结果
1)作业时整机运行可靠,没有发生换挡困难、动力熄火、陷车、故障等情况。
2)种子机械破损率为0.8%。种子破损主要在出现蒜瓣连体时发生。因此,蒜种准备时一定要严格筛选,确保每个蒜体独立分瓣。
3)空穴率为4.5%。经过排查分析发现,空穴主要是由个别排种管不顺直造成的,需要将播种管理顺固定,防止变形。
4)重播率为2.6%。重播主要是由蒜种连体造成的;或者是因为蒜瓣过小,取种器取种时同时取了两个。因此,需要对蒜种进行严格筛选。
5)穴距合格率为92.1%。穴距偏差不超过1 cm 为合格。穴距不合格主要是由于前期整地不到位,土壤没能完全打碎,土壤间隙较大,使得蒜种不能很好地在限定位置着落,落入土壤缝隙,从而穴距出现误差。
6)播种深度合格率91.4%。深度偏差不超过1 cm 为合格。
从试验结果来看,该机主要性能指标值均达到或优于市面上同类机具指标值,试验结果同时也验证了该设计思路和制造工艺是可行的,为后期机具的改进优化以及批量生产提供了可靠依据。
3.3.2 存在的不足与建议
1)由于主要采用钢铁件,本机显得较为笨重,作业时对土壤压实较为明显,因此有必要采用轻量化设计理念,减小机具的整机重量。
2)尽量选用标准件以提高可靠性,降低成本。机具制造时,应严把材质、加工、焊接及装配质量关,以提高整机的使用可靠性。
4 结论
根据当前大蒜播种技术研发现状以及市场需求,兼顾小农户和规模种植大户的需求,设计了六行手扶式大蒜播种机。试验示范基地的生产试验考核结果表明,该机具作业特点和作业性能能够满足当前大蒜播种农艺要求,具有较高的推广应用价值。