基于波束指向的近场MIMO雷达回波幅度校准方法
2020-12-08王祈亮
王祈亮,李 萍
(上海理工大学 光电信息与计算机工程学院,上海 200093)
引言
相比于传统的合成孔径雷达(SAR),多输入多输出(MIMO)雷达在发射端和接收端均采用多天线结构,从而得到了远多于实际收、发阵元数目的观测通道和自由度[1-3]。这种并行多通道获取信息的能力正是MIMO雷达的根本优势所在。所以各通道对于获取信号能力的一致性是MIMO雷达成像质量的关键[4-6]。
MIMO阵列中各阵元位置不同,导致它们相对同一目标的角度也不同,这就使得不同收发通道对于同一目标的信号反馈存在差异,也就是通道间的回波幅度差异。对于回波幅度差异的校准,最常见的方法是对各个通道进行回波幅度校准,一般的校准方法是将校准信号等幅输入接收通道,然后比较各通道输出的幅度[7-10],从而得到各通道之间的回波幅度差异进行校准。校准方法大致有两种:一种是在发射阵元前配置幅度校准器件,如文献[11-13],根据比较得到的回波幅度差异,调整信号的输出幅度,将整个阵列各个阵元的输出幅度调整一致;另一种如文献[14-15],通过在接收端处理接收信号的方式完成校准。但上述方法只能对收发通道的硬件引起的幅度差异进行校准,并不能解决收发机相对目标角度引起的回波幅度差异。
为了解决上述问题,本文提出了一种基于调整波束指向的近场MIMO雷达回波幅度校准方法。通过建立波束指向与幅度变化的关系,利用波束指向改变收发天线阵元对目标点的信号出射强度或接收能力,使所有通道对目标范围内每一个点的出射和接收能力相同,实现对回波幅度的校准。
1 回波幅度差异分析
图1所示为收发机与目标点相对角度引起的回波幅度差异的原理图。假设图中的三个天线(分别在图中标注为 a、b、c,a 为发射天线,b、c 为接收天线)完全一致,具有相同的辐射方向图 α(θ),α(θ)是一个天线增益 α关于角度 θ 的函数。显然图中三个天线相对目标的角度不同,增益也就不同:α(θA)≠α(0)≠α(θC) (θA、θC分别表示 a天线与 c天线相对目标的角度,天线b正对目标点P,所以相对角度为0°)。由此可得,ab收发通道(信号由 a 天线发射,经过目标反射后,由 b 天线接收)和 ac 收发通道间的增益也不同:α(θA)α(0)≠α(0)α(θC)⇒αab≠αac,这里αab和 αac分别表示信号通过 ab收发通道和 ac 收发通道后收发天线对信号的增益。
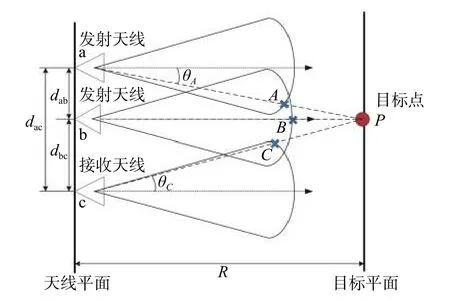
图1 分置型MIMO收发机间隔相关的回波幅度差异示意图Fig.1 Schematic diagram of the echo amplitude difference related to the separation of the discrete MIMO transceiver
根据天线方向图可知,相对于正出射的偏离角度越大,信号增益越低。由图1可知,ab 收发通道偏离角比 ac的偏离角大,所以 ab 收发通道对信号的增益比 ac 收发通道对信号的增益大:α(θA)α(0)>α(0)α(θC)⇒αab>αac。也就是说ab收发通道和 ac 收发通道间的回波幅度差异为Δαab−ac=αab−αac。
2 回波幅度差异校准方法
相比于器件本身及系统装配时引起的通道幅度差异,由收发机与目标点相对角度引起的回波幅度差异会根据成像场景的变化而变化。所以在讨论校准方法前,首先建立一个收发分置二维MIMO雷达的近场成像场景。如图2所示,建立一个具有M个发射天线和N个接收天线的收发分置二维MIMO阵列。天线所在平面与目标平面的距离为R。
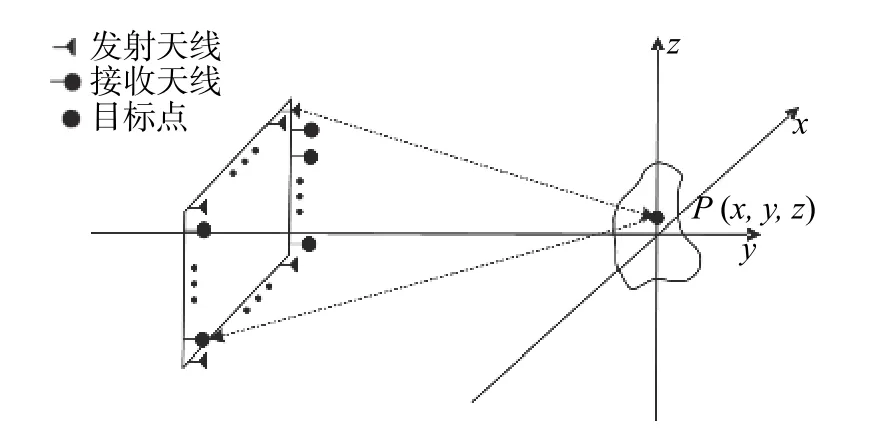
图2 收发分置二维MIMO雷达近场成像场景示意图Fig.2 Schematic diagram of the near-field imaging scenario of the transmit-receive discrete 2-D MIMO radar
校准之前首先需要取一个收发通道和目标点作为参考。目标点一般选择成像范围的中心点,将目标点记作P(x,y,z)=P(0,0,0)。参考通道一般选择增益为所有通道增益平均值的收发通道,将参考通道相对目标点的增益记作 α0。
本文基于天线在各方向上辐射强度不同的原理,调整天线的波束指向,由此改变特定方向上的辐射强度,从而使MIMO雷达各收发通道对于同一目标具有相同的回波幅度反馈。
利用波束指向调整进行回波幅度差异校准的第一步就是建立波束指向与幅度的转换关系。以一个天线方向图为例。如图3所示,将三维天线方向图投影在由水平轴和垂直轴组成的坐标系上。该坐标系的原点是天线方向图的中心点。在这里,仅考虑从−90°到90°的天线方向图。

图3 波束指向至幅度的转换过程图Fig.3 Diagram of conversion process from beam pointing to amplitude
图3所示为波束指向至幅度的转换过程图,当波束指向调整至图3(a)中的黑点时,得到图3(b)的结果。由此可以根据方向图上的角度确定幅度,黑点处的幅度与角度关系可以表示为α(40◦,−70◦)=−70dB。当完成这一波束指向调整过程时,等效于为原先的增益添加0.01%的权重。这一过程是波束指向调整至幅值的转换过程。
基于这一转换过程,可以根据天线与目标点位置计算得到各天线对于目标点方向的增益,从而得到各收发通道对目标点方向的增益。任意一对收发通道的增益可以表示为

式中:θtm表示第m个发射天线相对目标的水平角度;φtm表示第m个发射天线相对目标的垂直角度;(θrn,φrn) 表示第n个接收天线相对目标的角度,φ与 θ 分别表示水平方向角度与垂直方向角度;αtm(θtm,φtm) 表示第m个发射天线在相对目标的角度上的增益;αrn(θrn,φrn) 表示第n个接收天线在相对目标的角度上的增益;αtm−rn表示第m个发射天线至第n个接收天线的收发通道对信号的增益。
所有收发通道未校准前的增益可以表示为

任意一个收发通道与参考通道的回波幅度差异可以表示为

所有收发通道与参考通道的回波幅度差异可以表示为

得到各通道的回波幅度差异后,就可以调整波束指向,进行回波幅度差异的校准。在此,需要进行幅度变化至波束指向调整的转换。
假设已知幅值变化为 Δα=−10dB,如图4所示,可以找到无数个符合要求的点(虚线圈上的所有点)。这一过程可表示为

式中 (θl,φl) 表示符合要求的点在图4中的坐标。
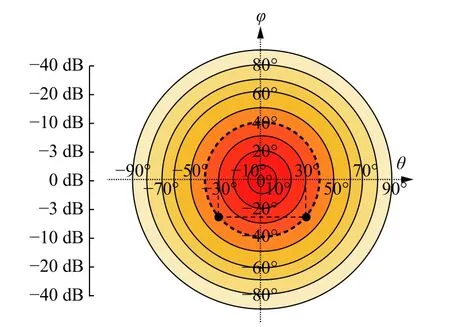
图4 幅度至波束指向的转换示意图Fig.4 Diagram of conversion process from amplitude to beam pointing
这时,由于角度变化越小,对阵列方向图的破坏越小,所以应该选择角度变化尽可能小的点。假设得到图4所示的两个点,这一过程可表示为

最后,根据阵元与目标的位置关系(天线波束指向的调整总是趋向于目标,如目标位于阵元的左下方,那么应该选择波束指向调整至左下方的点,如图4中左下方的点),从中选出最合适的点,进而完成从幅度变化到波束指向调整的转换。
通过上述转换方式,就可以将式(4)中的幅度变换转化为波束指向的变化,由此得到用于校准的波束指向调整的二维角度,即

经过校准后,各收发通道对于目标点方向的增益与参考通道一致,即完成回波幅度差异校准,由此得到

3 仿真及实验
3.1 仿真验证
基于上述原理,对一个L型分置MIMO雷达的近场成像结果进行仿真,比较加入回波幅度校准前后的成像结果。设置一个50发50收的分置型MIMO雷达,阵列的具体排布如图5所示,同时引入−3 dB波束角为30°的方向图作为天线的方向图。其余仿真参数如表1所示。
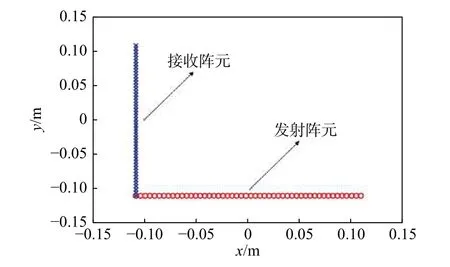
图5 收发阵元排布图Fig.5 Arrangement of transmitting elements and receiving elements
表1 MIMO雷达近场仿真参数Tab.1 Near-field simulation parameters of MIMO radar
成像结果如图6所示。图6(a)和6(b)是回波幅度校准前的成像结果,可以看到在非全向天线的条件下,L型阵列对于成像范围内一部分区域的成像结果相当差,只有在靠近阵列的部分有较好的成像结果。图6(c)和6(d)是回波幅度校准后的成像结果,可以看到在校准后,原先成像结果较差的部分区域得到了相当明显的改善。此外,波束指向调整后,MIMO雷达的阵列合成效率更高,分辨率也得到了提升,这与本文的主题无关,不作讨论。
图6 校准前后成像结果对比图Fig.6 Comparison of imaging results before and after calibration
3.2 实验验证
实验验证部分的参数严格按照仿真部分的参数设定。图7(a)是实验中所用的金属板目标,目标尺寸为15 cm×15 cm。图7(b)为实验的场景图,可见采用的是时延MIMO的方式进行成像实验。实验中将矢量网络分析仪(VNA)的两个通道分别作为MIMO的一个输入和一个输出。通过沿线性轨迹移动发射天线和接收天线,可以在不同的时间和不同的空间位置收集多个输入和多个输出,从而达到MIMO雷达的信号采集效果。
由于成像距离较近,波束角度有限,从图8所示实验结果可以看到,只有目标金属板的左下部分能够成像。但对比校准前后,校准前清晰成像的目标尺寸大约为2 cm×3 cm,校准后大约为5 cm×5 cm,目标的回波幅度不均匀性有显著改善,验证了该校准方法的可行性。
将成像距离设置为20 cm后重新实验,其余参数不变。成像结果如图9所示。
拉近了成像距离后,天线的波束覆盖范围变小,成像结果变差,可以从图9(b)与8(b)的对比中看出,校准后能够清晰成像的范围变小了,从大约5 cm×5 cm缩小至不足4 cm×4 cm。从图9(a)与9(b)的对比中依旧能够清晰分辨出校准前后的差异,但与实测实验1的校准结果相比,拉近成像距离后校准结果是相对较差的。导致这一现象的原因主要是天线波束在更近的距离条件下波束宽度不足,阵列的合成效率降低,有效的收发通道数量较少,从而使得分辨率降低,成像质量下降。
图7 实验所用天线的方向图及实验场景Fig.7 The antenna pattern and experiment scene

图8 实测实验1的成像结果对比Fig.8 Comparison of imaging results of Experiment 1

图9 实测实验2的成像结果对比Fig.9 Comparison of imaging results of experiment 2
4 结论
本文基于波束指向调整设计了一种针对近场分置型MIMO雷达的回波幅度校准方法。该方法利用波束指向调整与幅度变化的转换关系,实现了通过调整波束指向间接改变特定方向上的幅度的效果。该方法无需对系统添加幅相校准器件,仅需对MIMO雷达的各个天线进行波束指向的改变,不会增加系统复杂度及引入其他器件的硬件误差。仿真及实验证明,本文设计的方法能够显著改善MIMO雷达在近场的回波幅度不均匀问题,完成对MIMO雷达的回波幅度校准,从而提高成像质量。
