面向电力线路规划的复杂场景下三维组合定位算法研究*
2020-12-07宋占党王海宾白霄磊陈德高
宋占党 王海宾 白霄磊 陈德高
(国网乌鲁木齐供电公司 乌鲁木齐 830011)
1 引言
电力线路覆盖城市、农村的广大区域,节点众多、支路密布。作为电力线路规划的重要技术支撑地理信息系统将电力线路规划和区域建设规划有机结合,使得科学、符合经济发展的电力线路规划成为可能。目前采用GIS 技术的电力线路规划软件的通常做法是,将所设计的电力线路的空间数据和地理属性数据和GIS 相结合并直观显示出来,这样便于电力线路规划设计人员在具有交互性的平台上对设计存在的问题进行优化[1~2]。如此利用GIS 系统的电力线路设计优化和科学规划可以提高电力线路进行最优规划设计的效率,辅助设计规划人员避开不适宜架设电力线路的位置,结合城市建设规划,合理规划设计变电站选址和架空线走廊,使电力线路的规划设计更符合实际情况和未来城市规划建设需求。由此看来,通过精确的电力线路定位,是电力线路GIS规划设计的重要前提。
目前最主流的定位技术全球导航卫星系统(GPS)。GPS 定位技术具有易受信号干扰、弱穿透和多径衰落等缺陷,其定位精度易受到环境的影响,无法应用于变电站等狭窄室内等场景。因此需要将GPS 技术与其他无线定位相结合以提高电力线路定位系统的可靠性和准确度[3~5]。
与蓝牙、Wi-Fi、蜂窝网络等窄带宽无线定位系统相比,超宽带(UWB)是在宽带信道上通过发送一组经过编码的低功耗高频率窄脉冲实现信息传递。这种编码方式使得UWB拥有超越传统的窄带宽无线传输的性能优势[6]。而远超其他无线定位技术的超宽带(UWB)定位精度证明了该无线技术在定位领域具有良好的应用前景[7]。由上可知,GPS和超宽带定位技术存在良好的互补性,这两者的组合可提高在混合和复杂环境中的定位性能。
基于三轴磁力计、三轴陀螺仪和三轴加速度计(MARG)的定位系统已广泛应用于智能终端。MARG 定位系统具有无需外部信号、定位精度高的优点。但是MARG由于技术限制,在长期运行过程中存在检测噪声和累积误差过大的问题[8]。而通过与GPS定位技术的结合,既可弥补GPS在无卫星信号情况下无法定位的问题,也可通过GPS定位数据纠正MARG 在长期运行中噪声和误差无法重置的缺陷。
基于上述理论,本文提出了一种融合GPS卫星定位技术、MARG定位技术和UWB协同定位系统。在混合场景中,使用三个定位系统的共址融合,组合定位系统可以通过加权融合的方法,依靠相对准确的定位数据,提升复杂环境下的定位准确性。
2 GPS/MARG组合定位系统研究
2.1 GPS定位分析
GPS 定位原理是将接收的星历参数和时间信息使接受设备与卫星时钟同步,从而实现信号传输时间延迟t 的精确计算,最终得出从卫星到用户的距离。计算公式为[9]

式(1)中c 为光速。虽有时钟同步的步骤,但是接收设备与和卫星的仍不可避免存在时钟差,记为t。因此式1 所计算的s 被称为伪距,而不是卫星和用户之间的真实距离。
在以地球为中心的地球固定(ECEF)中,第i卫星的坐标是(Xi,Yi,Zi),用户坐标(x,y,z),方程如下:

由式(2)可知,需要至少四个或更多个卫星伪距数据才能来获得(x,y,z,Δt)数据,从而实现精确的GPS定位。
2.2 基于卡尔曼滤波的GPS/MARG融合算法
利用卡尔曼滤波算法[10],将GPS 和MARG 两种定位技术结合起来实现互补,具体实现如下。
1)状态方程
卡尔曼滤波器状态向量Xk可表示为

式(3)中ax和ay分别表示水平方向平和垂直方向上的加速度。bx和by表示水平方向平和垂直方向上的加速度噪声。v 表示向量速度。s 表示指定时间内的运动距离。离散状态方程是:

式(4)中Xk表示k 时的状态方程的状态向量;Wk-1表示状态处理噪声向量;Φk,k-1表示状态转移矩阵:

式(5)中,T表示测量传感器的时间间隔。
2)测量方程
卡尔曼滤波器测量方程设计如下:

式(6)和式(7)中:Zk是测试载体;重力传感器在x方向和y方向的测量值分别为fx和fy;采用GPS定位技术测量所得的长度为SGPS。测量变换矩阵Hk为

由于使用扩展卡尔曼滤波方法对非线性的MARG 系统的观测方程进行线性化处理,因此,在考虑滤波过程中必然存在的线性化误差,本文通过迭代扩展卡尔曼滤波算法的方法以降低滤波误差的影响。
3 UWB定位系统
UWB 定位技术常用的定位算法包括[11]:基于接收信号强度计算(RSS)、基于到达角度差(AOA)、基于到达时间(TOA)、检测信号到达两个基站的绝对时间差(TDOA)。
UWB 定位系统系统使用TDOA 定位算法。TDOA 算法无需同步基站和标签的时间,只需要在基站之间进行时间同步。
3.1 坐标转换
为了实现室内狭窄场景和野外场景无缝定位对接,需要选择两个室外点作为基准[12]。基于室外点的GPS 定位数据,实现室内两个参考UWB 基站位置坐标的转换,最终基于参考基站的位置坐标信息得出所有基站的位置坐标信息。当GPS 无信号或精度差时,可以UWB 定位系统为主给出移动标签位置坐标信息。
室外点的位置坐标由地球的经度L、地球的纬度B 和地面高度H 表示。使用式(9)对上述坐标进行转换。

在式(9)中,ΔL 是经度差,L 是期望点的经度。L0是中央子午线的经度,3度(中央子午线由位置的经度决定)。e 是椭圆形的第二偏心率。B 是请求点的纬度。

其中X 是对应于纬度B 的子午线弧长;N 是对应于基本点的子午线圆的半径。
基于两个室外参考点坐标信息可计算出所有室内基站位置信息。基于室内基站的位置信息,UWB子系统可独立地检测目标位置。
3.2 采用卡尔曼滤波器消除非视距误差(NLOS)
在本文中,UWB 定位系统采用TDOA 算法,取两个到达基站的时间(TOA)之差。在两个TOA 过程期间存在NLOS 误差。因此本文采用如下的卡尔曼滤波算法消除TDOA 定位算法中存在的NLOS误差。
卡尔曼滤波基本思想取一时刻的测量值和状态值,然后使用状态变量估计下一时刻的值,迭代计算出最终的定位[13]。状态方程和测量方程如下:


式(11)、(12)中,s()是状态向量。z()是测量向量。A 是状态转移矩阵。G 为测量矩阵:w()过程噪声向量。v()是测量误差向量。
首先,将NLOS 误差与总误差分开,并将其添加到要估计的状态向量以估计NLOS 误差。测量值将NLOS 误差减去下一个输入值,从而得到优化的TDOA 值。卡尔曼状态矩阵A,状态变量s(k)设置如下[14]:

其中Δ 是卡尔曼滤波器的采样间隔,R(k)是要估计的TOA值,r'(k)是r(k)的一阶导数。
第一步卡尔曼滤波器,将NLOS 误差分量添加到状态变量中。添加NLOS 错误后,状态变量s(k)的维度被扩展:

在迭代过程中,根据NLOS 错误的非负性质,将错误数据强制为零。
卡尔曼滤波器的迭代过程如下:


初始测量值为实际测量值减去NLOS 的估计值。随后将初始测量值作为卡尔曼滤波器的输入。利用卡尔曼滤波器消除NLOS 误差,并设置较低的阈值以获得更准确的TDOA估计值。
3.3 基于圆形误差的定位分析
循环误差概率(CEP),通常用作评估性能指标密度性能准确性的方法[15]。散射点范围的中心是圆形的,包含50%的丢弃概率范围。
在这个阶段,CEP定义包含测试系统误差的准确性,可以更具体地反映精度的优劣。确定点作为原点,建立笛卡尔坐标系XOY。设定纵向定位偏差y 和横向定位偏差x,并遵守正态分布。pi 错误的一般形式如下:

其中,x 轴和y 轴方向下降标准偏差分别为σx和σy;是x 轴和y 轴方向下降偏差的平均值分别是μx、μy;x 轴和y 轴方向偏差的系数用ρ来表示,ρ的取值范围为(-1,1)。CEP 概率通常计算为0.5。将概率值P增至0.95,可提升UWB系统的定位精度。
误差半径定义为ruwb,k 为95%。 然后设置相应的阈值半径Ruwb。参数错误率euwb,k的定义如下:

UWB 定位精度和误差半径ruwb,k呈正相关关系。如果偏差过大,误差半径ruwb,k将超过阈值Ruwb,k,此时将判断环境处于野外,适用GPS和MARG的定位技术。
4 基于自适应加权融合算法的GPS/UWB/MARG协同定位系统
协同定位系统首先对GPS/MARG的定位数据进行测试,如果定位误差较小,则直接从这两种组合定位系统中输出定位数据;如果GPS/MARG 子系统信号弱或精度不佳,则采用UWB的定位数据,同时基于圆形概率误差算法(CEP)的实时检测UWB精度。
通过加权算法融合三个定位系统的协同定位系统架构如图1所示。

图1 系统架构图
如图所示,基于卡尔曼粒子滤波器的GPS 和MARG 的组合用于融合数据并用作室外定位系统。根据定位数据错误率性能评估确定输出模式;UWB 定位系统具有高精度。只需消除NLOS误差,即确定数据误差率评估的性能;根据错误率确定场景,如图所示确定输出模式。
协同定位系统具体实现过程阐述如下。
首先,基于GPS 系统级精度因子HDOP 对GPS和MARG组合定位系统输出的位置数据进行测试。

其中,gii(i=1,2,3,4)是G=(HT·H)-1的对角元素,H是位置信息矩阵。
错误率egps,k的计算方法为

Lgps,k表示在k 时获取的GPS 的位置信息,并且lgps,k表示卡尔曼滤波估计。
估计组合定位子系统的性能参数rgps,k,定义如下:

其中,加权因子a 可以从实际数据估计,取值范围为[0.6,0.8]。
通过分析HDOP 因子来计算组合定位子系统的性能参数rgps,k。依据实际情况,确定GPS 和MARG 组合定位系统的阈值以便确定该组合定位系统是否处于信号弱或精度不佳的环境中。
如 果rgps,k小 于 阈 值,协 同 定 位 系 统 将GPS 和MARG 组合定位系统输出的数据作为作为整个系统输出。图1中的b和c断开,不启用UWB子系统。
如果rgps,k大于阈值,说明GPS 和MARG 组合定位系统所输出的数据精度不够,则以UWB 定位子系统为主的进行目标定位。
如果ruwb,k大于误差半径阈值,协同定位系统确定此时所处场景为室内外交错的混合区域。协同定位系统通过对GPS/MARG组合定位系统的输出和UWB定位系统的输出进行加权计算得出最优的定位结果。此时图1 中,b 开关闭合,a 和c 开关断开。加权算法为

如果ruwb,k小于误差半径阈值,则说明定位目标在室内,则直接输出UWB 定位数据,即图1 中的c关闭,a 和b 断开。同时UWB 定位基站基于坐标变换来计算位置坐标。来自单个UWB定位系统的目标用户位置信息可以实现大地测量数据的输出,并确保数据一致性。
5 实验分析
将GPS/UWB/MARG协同定位系统将用于某城市区域商务中心的电力线路路径的定位实验。该电力线路路径穿越室内区域和室外区域,室外场景采用GPS 定位系统,室内场景采用UWB 定位系统,室内外交换场景采用协调定位。UWB 室内定位技术协同GPS/MARG组合定位系统实现混合场景定位导航。GPS/UWB/MARG 协同定位系统仿真图如图2所示。
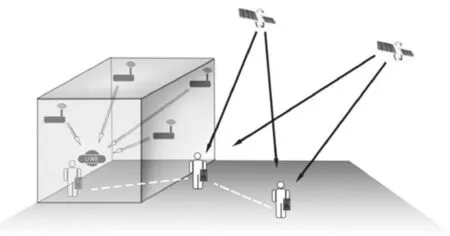
图2 协同定位系统实验仿真图
该商务中心的电力线路路径如图3所示。

图3 电力线路路径
实验步骤如下:首先部署8 个室内UWB 基站;基于室外参考点坐标推算UWB 基站的坐标;设计含复杂场景的测试路径。然后依据测试路径对协同定位系统进行定位性能测试。测试装置为固定在移动平台上的GPS 接收器、磁/惯性传感器和UWB移动标签。
室内所设置的8个UWB基站位置如图4所示,由于室外参考点所处位置卫星信号良好,因此使用GPS 对室外参考点a、b 进行反复定位测试,可得出较为精确的室内基站的位置坐标。基于得出的基站位置作为绘制出基站部署示意图如图4所示。
实验选择了三个定位算法进行性能对比:
1)采用GPS 和MARG 组合定位系统进行轨迹定位测试。得出的目标轨迹如图5所示。

图4 基站部署示意图

图5 GPS/MARG组合定位子系统测试路径
2)采用UWB 定位系统进行定位测试,测试轨迹如图6所示。图6所示的路径包括室内场景和室内外重叠区域。

图6 UWB室内定位系统测试路径
3)采用GPS、UWB 和MARG 协同定位系统进行定位测试,测试轨迹如图7所示。

图7 协同定位系统测试路径
根据图5 所示的测试轨迹,在室外场景下,定位轨迹清晰,而在室内场景下定位轨迹较淡,这说明基于GPS 和MARG 的组合定位系统在室外环境定位性能良好,而在室内环境中几乎无法输出定位数据。
根据图6的测试轨迹可以看出,UWB定位系统在室内定位准确度非常高,但是在室内外混合区域,出现间歇性跳跃的情况。
根据图7 的定位轨迹可知,基于三种定位技术的协同定位系统在室内环境、室外环境和室内外混合区域都输出了准确度较高的定位数据。
对上述实验数据进行分析可知,协同定位系统的不但能够输出定位精度较高的定位数据,其适用环境也更多,能够在不同的环境进行可靠的定位。
本实验基于累积分布函数来评估该协同定位系统相对于其他组合定位系统的性能优势。累积分布函数(CDF)对位置误差的概率分布进行描述的方式。不同组合定位系统的错误概率分布如下图所示。

图8 误差概率分布
不同组合定位系统的误差对比如表1 所示。表中GPS/MARG/MAP组合定位系统使用地理信息来提高定位性能。GPS/ WLAN/ CELLULAR 系统基于蜂窝信号、无线局域网信息和GPS信号提供连续和准确的位置信息,但是该定位方案在信号不佳的区域无法可靠定位。由表1 所示的实验数据可知,与其他两种组合定位系统相比,本文所设计的组合定位系统可以实现更好的定位性能。
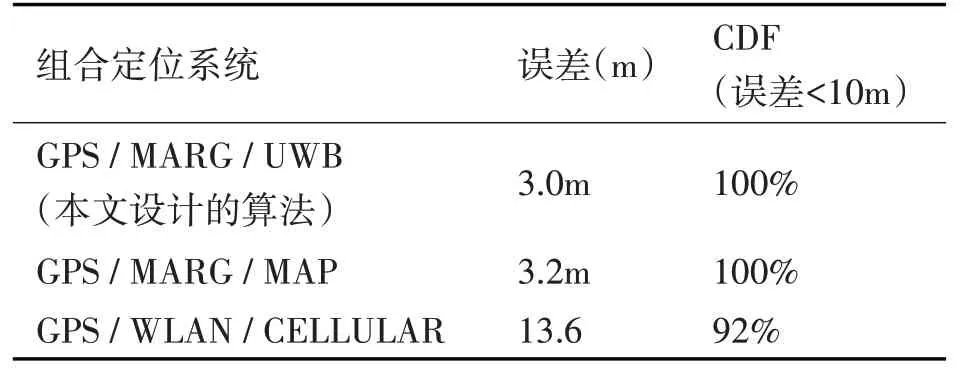
表1 三种组合定位系统性能对比
6 结语
基于电力线路规划的精确定位需求,本文研究了一套基于多址系统的融合定位算法,并构建了包括8 个基站参考节点,1 个移动节点和1 个GPS 接收机的实验环境对该算法的有效性进行了验证。
通过使用卡尔曼滤波技术融合不同的系统数据,最终实现了载波在室内外环境下的无缝导航和定位解决方案。基于GPS、UWB 和MARG 的协作定位算法与单个定位算法相比,协同定位算法大大提高定位系统的运行可靠性,有效解决了基于单个定位算法的系统在复杂区域无法进行高精度、可靠定位的问题。在对该系统与其他组合定位系统的定位性能的实验对比中,表明了本文所述定位算法的具有更加良好的定位准确性。
