基于区间二型模糊滑模的移动机器人轨迹跟踪控制
2020-12-04马飞越佃松宜韩吉霞
马飞越,周 秀,倪 辉,佃松宜,韩吉霞
(1.国网宁夏电力有限公司电力科学研究院,银川 750011;2.四川大学电气工程学院,成都 610065)
轮式移动机器人具有(wheeled mobile robot,WMR)结构简单,运动灵活方便等优点[1-4],被广泛应用在农业灌溉、物流运输、探险侦探、航空航天、无人驾驶、室内定位等领域[5-8]。WMR系统是典型的非线性系统,其轨迹跟踪问题作为WMR运动控制的基础,被众多学者广泛关注。
近年来,诸多学者提出不同的方法对WMR轨迹进行控制、跟踪。Phom等[9]采用backstepping和分层滑模控制的方法对WMR轨迹进行跟踪,保证了闭环系统的稳定性,但是没有考虑到反演控制中出现的微分爆炸问题;文献[10]提出自适应反演滑模的控制方法,设计动力学自适应规律,使WMR左右两轮平稳运行,并运用反控制对其进行运动学控制,保证了位置跟踪误差逐渐收敛,但是没有考虑姿态角速度的跟踪情况;郭一军等[11]基于双幂次趋近律的滑模控制对WMR轨迹进行跟踪,使WMR系统在任意初始状态都可以迅速收敛,但双幂次趋近律对参数的选择要求较高且抗干扰性不是很强。
为此,提出将滑模控制(linear sliding mode control,LSMC)与区间二型模糊控制(interval type-2 fuzzy logic control,IT2FLC)结合的方法。利用滑模控制的快速响应,令系统在有限时间收敛至平衡状态,设计区间二型模糊控制,将滑模面作为模糊控制输入,模糊控制输出作为滑模趋近律参数,动态调节滑模控制系统,增强对干扰的适应能力,有效削弱抖振,使WMR系统拥有更加优良的运动品质。
1 移动机器人运动学建模
1.1 WMR基本描述
移动机器人因结构简单、灵活易操作而被广泛应用。针对研究对象做如下假设。
(1)移动机器人在二维平面内运动。
(2)车体关于纵向轴对称。
(3)车体在平面移动时,只进行滚动,无相对滑动(横向或纵向)或可忽略。
1.2 WMR运动学建模
建立参考坐标系对WMR的地面运动进行描述。
简化模型如图1所示。图1中,XOY为移动机器人全局参考坐标系;O为WMR两轮轴中点;θ为WMR运动姿态角,表示运动方向与x轴夹角;[x,y]为WMR实际位置;[xd,yd]为理想轨迹。

图1 WMR运动学模型Fig.1 Kinematic model of WMR
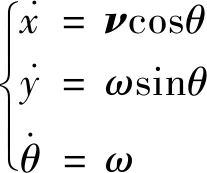
运动学方程表示为

(1)
式(1)中:v为运动线速度;w为运动角速度;[x,y,θ]T为控制输入。
通过对控制律N=[ν,ω]T的设计,对WMR的位置[x,y]T及θ进行跟踪。
根据式(1)的推导,得到运动学模型,表示为
(2)
2 滑模控制器设计
2.1 双闭环结构框图
图2为滑模控制结构,外环是位置控制子系统,内环是姿态控制子系统。外环产生姿态角控制信号θd传给内环,内环再通过滑模控制实现对角度的跟踪。两点说明如下。

图2 WMR双闭环结构Fig.2 Double closed-loop structure of WMR

(2)对外环产生的中间指令信号θd,用二阶微分控制器求导。
(3)
式(3)中:n(t)为待微分输入信号;R为常数;x1为对跟踪信号;x2为信号一阶导数的估计。
2.2 双闭环控制律设计

(4)
式(4)中:
(5)
令
(6)
对于X轴、Y轴及姿态角度跟踪,设计:
(7)
式(7)中:c1、c2、c3为常数;s1、s2、s3为滑模面。根据式(7),求导得
(8)
(9)
设计趋近律:
(10)
根据式(9)、式(10),得到控制律为
(11)
(12)
3 区间二型模糊调节滑模趋近律
3.1 区间二型模糊控制器基础
通常,区间二型模糊控制器由五部分组成,即模糊器、模糊推理机、规则库、降型器和解模糊器(图3)。

图3 区间二型模糊逻辑结构框图Fig.3 Block diagram of interval-2 type fuzzy logic structure
(1)模糊器:是模糊控制前件,通过隶属函数将精确输入转成模糊输入。

(3)隶属函数选择。隶属函数选择高斯函数,具体如式(13)~式(18)所示:
(13)
(14)
(15)
(16)
(17)
(18)
式中:下标up和low分别表示上下隶属函数。
(4)模糊推理机。点火区间Fn可表示为
(19)
(20)
(21)

(5)降型器。选择集的中心法降型,表述为
(22)
(23)
Ycos=[klj,krj]
(24)

(5)解模糊。通过解模糊,可得到最终输出,中心解模糊表示为
(25)
式(25)中:j为正整数;H为截集层数;kj为最终输出。
3.2 IT2FLC调节趋近律
设计3个模糊控制器,控制X轴轨迹、Y轴轨迹和姿态角速度。控制器输入si分别为s1、s2和s3;输出分别为k1、k2和k3。模糊域分为4层,记为正大(PB)、正中(PM)、正小(PS)及零(ZR)。
当|s|>1时,应增大滑模趋近律增益,让X轴轨迹、Y轴轨迹快速趋近滑模面;当0<|s|<1时,应减小趋近律增益,降低X轴方向、Y轴方向和角度速度,降低系统抖振。
IT2FLC规则如表1所示。

表1 模糊控制规则Table 1 Fuzzy control rules
通过IT2FLC对滑模趋近律调节之后,得到新的趋近律:
(26)
进而,WMR系统控制律为
(27)
(28)
对设计的位置控制系统及角度控制系统进行稳定性证明。
Lyapunnov函数V1设计为
(29)
则
(30)
由式(31)可知,X轴方向稳定,误差可收敛于零。Lyapunnov函数V2设计为
(31)
则
(32)
由式(32)可知,Y轴方向稳定,误差可收敛于零。Lyapunov函数V3设计为
(33)

-k3s32-k4|s3|≤-2k3s32≤0
(34)
由式(35)可知,角速度跟踪稳定,误差收敛于零。
4 仿真证明
控制对象如式(1),位置、姿态角度控制律如式(11)、式(12)。取理想位置曲线:xd=t,yd=sin0.5t+0.5t+1;外部扰动:d1=0.1cost,d2=0.1cost,分别将外部扰动至于X轴跟踪轨迹与Y轴跟踪轨迹中(t为时间)。位置初始值为:[0 0 0]。为了更好地显示本文方法(IT2FLC-LSMC)有效性,将本文方法与一型模糊滑模、LSMC两种方法进行对比。仿真结果如图4~图6所示。
图4为外部扰动为d1=0.1cost,d2=0.1cost时的X-Y轴轨迹跟踪、X轴轨迹跟踪、Y轴轨迹跟踪及角度跟踪情况。由图4所示,IT2FLC-LSMC方法对理想轨迹具有最快最好的跟踪效果。

图4 外部扰动为d1=0.1cost,d2=0.1cost的跟踪Fig.4 Tracking with external disturbance of d1=0.1cost,d2=0.1cost
图5为外部扰动为d1=0.1cost,d2=0.1cost时的X轴方向、Y轴方向、角度跟踪误差情况,如图5跟踪效果显示,本文方法跟踪误差最小。

图5 外部扰动为d1=0.1cost,d2=0.1cost的跟踪误差Fig.5 Tracking error with external disturbance of d1=0.1cost,d2=0.1cost
图6为外部扰动为d1=0.1cost,d2=0.1cost时的角速度、线速度控制器。由图6可知,本文方法控制输入振荡最小,WMR系统运动更加平稳。
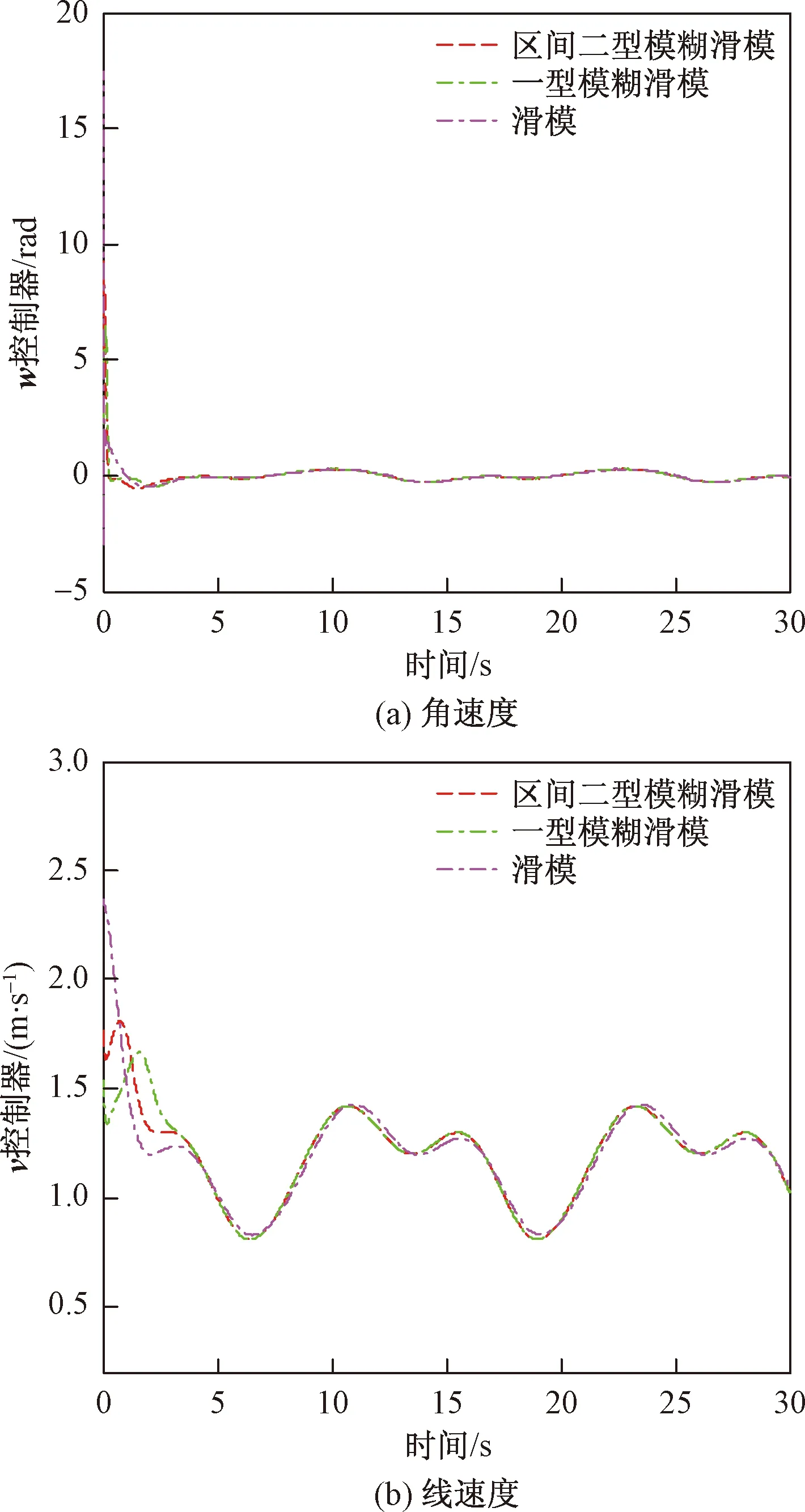
图6 外部扰动为d1=0.1cost,d2=0.1cost的控制器Fig.6 Controller with external disturbance of d1=0.1cost,d2=0.1cost
5 结论
提出了基于IT2FLC和LSMC的WMR轨迹跟踪控制方案。采用滑模控制,令系统在有限时间内快速收敛,与 IT2FLC控制方法结合,将滑模面作为模糊控制器输入,输出作为滑模趋近律参数,对趋近律动态调节,加强对随机扰动的适应能力并削弱滑膜输入的抖振。最后,将本文方法与T1FLC-LSMC、LSMC两种方法进行对比,仿真结果显示出本文方法的有效性。
