基于露天矿区智能驾驶场景的V2X通信技术研究及应用
2020-12-04苏敏
苏 敏
(潍柴动力股份有限公司软件研究院,山东 潍坊 261000)
0 引言
矿区场景具备封闭管理、路线固定、车辆行驶速度低、路况可控等特点,是智能驾驶最可能商业化落地的场景之一。矿区的环境与正常的路面环境存在很大差异,主要表现在车辆的行驶路线存在坡度,交叉路口存在感知盲区,作业面存在深度差异等。
与摄像头或激光雷达相比,V2X拥有更广的使用范围,它具有突破视觉死角和跨越遮挡物的信息获取能力,同时可以和其他车辆及设施共享实时驾驶状态信息,还可以通过预判算法产生预测信息[1]。针对露天矿区场景特性,使用V2X技术协助矿车感知和规划路径。
1 V2 X技术研究及应用现状
1.1 V2X通信协议研究现状
车联网标准体系主要包括无线和应用两大部分,以底层的无线通信技术区分,目前主流的两条技术路线是C-V2X (Cellular Vehicle-to-Everything)和DSRC(Dedicated Short Range Communication),上层的应用标准与部署地域耦合性较大,由各国家和地区根据区域应用特点进行制定[2]。DSRC是一种专用短距离的无线通信技术,不依赖于任何附加的基础设施,从而最小化传输时延,但DSRC需要首先建立通信链路,造成较大的网络开销[3];LTE-V2X不需要建立通信链路,网络开销小且稳定性高,但是需要网络中继支持。基于两种V2X通信方式各有利弊,在智能驾驶领域需要依据不同的应用场景和需求来选择合理的V2X通信方式。
传统的V2X通信主要以欧洲、美国以及日本推行的DSRC技术为主,该技术基于IEEE802.11协议扩充的IEEE802.11p协议,又称车辆环境中的无线接入(Wireless Access in the Vehicular Environment,WAVE),主要应用于车辆之间的无线通信。我国重点支持具有自主知识产权的C-V2X技术研发与产业化,C-V2X是一种基于蜂窝网的V2X无线通信技术,除支持车与车、车与人、车与路侧基础设施通过直通方式进行通信外,也包含基于云平台的LTE连接和信息服务,因此具备提供专用短程直接通信与广域蜂窝通信的综合通信能力。车与车、车与人、车与路侧基础设施短程直接通信,可以不需要LTE网络支撑,提供主动安全等低时延要求的应用;车与云平台则经由LTE网络提供基于云端的更加丰富的综合信息服务。
1.2 V2X技术应用现状
我国以华为、大唐等通信公司为主导,提出对LTEV2X通信技术进行研究,与车企合作共同推出V2X解决方案,并在车路协同及自动驾驶领域进行了初步应用国际上各项V2X技术都尚未实现大规模商用,一方面受制于DSRC技术的局限性,另一方面则是由V2X特殊性决定的,车辆、道路及其他设施需要增加V2X通信功能的设备才能实现互联互通。
随着V2X核心芯片、模组和终端产品研发基本成熟,大唐、华为、高通等企业已对外提供基于LTE-V2X的商业芯片、模组。华为、大唐、中国移动可以提供基于LTE-V2X的车载单元、路侧设备以及相应的软件协议栈,相关终端产品已具备商用基础。
目前针对矿区、农田等非道路场景的V2X应用处于初步阶段,非道路场景没有相应的标准及规范进行对V2X技术的约束,目前需要针对不同特定场景的不同特性,制定合适的V2X解决方案。
2 露天矿区智能驾驶场景环境特性
矿区主要分为两大类:露天矿和地下矿,对于矿体所处的位置距离地面比较近时,选择露天矿的形式进行开采能够降低工作难度,提高开采效率,同时能够增加安全系数。露天矿大多数采用凹陷式阶梯状分布,经过层层剥离,将矿体之上的非矿物资去除,从而实现底层矿体的开采。在矿区开采过程中,由上至下层层剥离上层浮土及岩石,并不断扩展采矿范围,同时在剥离过程中需要把剥离的废土及岩石运送到已经完成采矿的排土区进行填充,这样会造成在不同的深度都会有作业车辆进行作业。
2.1 矿区底层作业面网络信号弱
在矿区中挖掘机从上至下进行浮土与岩石的剥离,宽体车采用无人驾驶车辆由下至上进行废料的排卸,挖掘机与宽体车进行通信时处于会处于不同的水平面。由于露天矿区的地形会随着开采的进行不断地改变,会把基站设在固定的地表层,导致矿区底层作业面的信号较弱,从而影响通信质量。在处于不同深度的作业面的车辆进行相互通信时会造成信号严重的不匹配,尤其是处于低洼处的信号较弱无法传输信息至较高层的作业车辆。因此需要借助V2X技术进行辅助转发。
2.2 作业路面交叉路口
由于露天矿区整体作业面呈阶梯状分布,各作业面交汇互相连通,在交汇处的路口与道路的路口完全不同。由于各个作业面不处于同一水平面,从而使不同作业面的车辆在作业面交汇处存在视觉盲区,单纯的只依赖于车辆的雷达及摄像头是不能安全的完成会车。因此需要依赖于网联功能来协助感知。
2.3 基础环境频繁改变
矿区的无人驾驶车辆是由高精地图调度平台依据作业面情况及车辆位置进行车辆路径规划及调度,从而实现装载车辆与挖掘机的高效匹配。由于矿区在开采过程中,会随着开采任务的进行作业面实时发生变化。高精地图是依赖于地图数据的采集,而高精地图的采集频率是周期性采集不能达到实时的采集效果,因此需要依赖于作业现场的网联终端进行辅助路径规划与调度。
3 露天矿区智能驾驶场景V2X技术应用
由本文的第2部分的描述可知:露天矿区存在低洼处信号覆盖较差、作业面交叉口存在感知盲区以及作业面路况不断改变的情况。针对露天矿区的特点设计了相对的V2X技术解决方案,露天矿区V2X技术应用基本框架如图1所示。
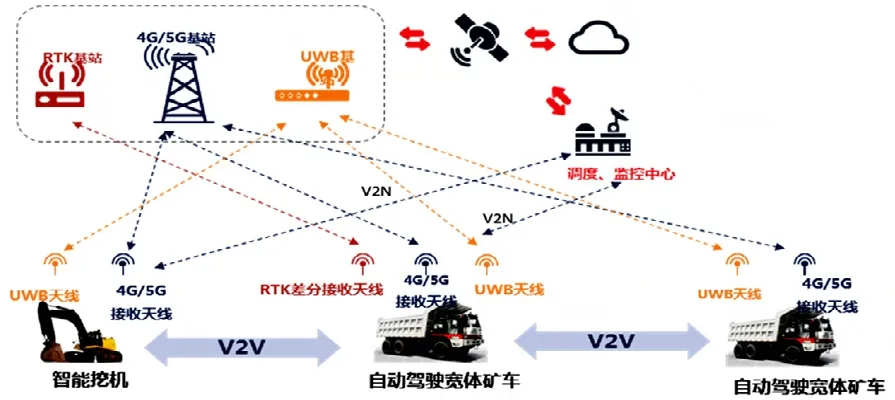
图1 露天矿区V2X技术应用基本框架
3.1 协助转发
挖掘机与无人驾驶排土车除了需要通过V2V的通信方式进行协助作业,同时挖掘机会将作业面情况、调度需求通过V2N的形式将数据转发至云平台调度中心。由露天矿区智能驾驶场景环境特性可知,处于深处作业面的挖掘机受基站影响导致信号较弱不能通过蜂窝网络进行数据传输。在此情况下,需要借助V2V的直通方式将信息转发至信号良好的车辆,信号良好的车辆将接收到的信息通过V2N的形式转发至云平台。实现信息转发需要修改原有的广播的数据格式,在原始的DSM广播信息格式[4]中加入转发标志位,接收到广播信息的车辆根据判断标志位来判断是否需要转发至云平台。信息格式示意图如图2所示。

图2 信息广播数据格式
3.2 协助感知
在矿区作业面交汇口存在感知盲区,通过V2V直通方式广播到周围车辆,从而实现协助感知功能。
车载V2X终端能够与周围不同V2X终端交换车辆安全状态数据,通过广播将自身所在车辆的实时状态包括车辆ID,车辆尺寸、车辆类别、位置信息、方向、车速、加速度、转向角速度、刹车状态信息告知周围车辆。车辆根据接收到的广播信息结合车端感知信息进行信息融合,从而作出正确决策。
3.3 辅助路径规划及调度
矿区作业面会随着开采作业的进行不断改变,云平台的高精地图更新频率大于作业面变化频率。云平台根据高精地图对自动驾驶宽体车进行全局路径规划,如果高精地图没有及时更新作业面的变化可能会导致错误的全局路径规划。所以,需要借助V2X网联设备将整车上的高清图片信息及作业面情况上传至云平台,云平台根据V2X设备上传的信息进行综合评估,优化全局路径;另外,也可以将最新的作业面信息广播至附近车辆协助车辆进行局部的路径规划。
4 结束语
V2X技术对露天矿区智能网联的应用起着至关重要的作用。V2X技术不仅能够实现车辆与车辆、车辆与路侧设备以及车辆与云端通信的功能,还能扩展车辆对环境的感知范围,能协助动态变化的场景进行路径规划的功能。
