多云天气条件下的大气偏振光定向方法
2020-12-02范颖何晓峰范晨胡小平吴雪松韩国良罗凯鑫
范颖,何晓峰,范晨,胡小平,吴雪松,韩国良,罗凯鑫
国防科技大学 智能科学学院,长沙 410073
在自主导航领域,除了传统的惯性导航技术和卫星导航技术外,仿生导航已成为近年来自主导航领域的研究热点。随着生物学和仿生学的不断发展,其研究成果也为仿生导航技术的发展提供了有力的支撑。太阳光经过大气层的散射形成的天空偏振光是自然界的导航信息源,许多动物都会借助天空偏振光进行定向[1-3]。仿生偏振光导航就是以大气偏振模式为基础来获取载体的航向信息,具有全自主、抗干扰、测量误差不随时间积累等特点,适用于复杂环境下长航时、远距离的自主导航,在船舶、汽车、飞行器等领域具有广阔的应用前景[4-5]。
基于阵列式偏振光相机设计的光罗盘在结构上十分接近于昆虫的复眼结构,这种设计方式可以最有效地得到偏振信息[6-7]。现阶段用于偏振光定向的方法主要有2种:第1种是基于天空全部区域的偏振图像法;第2种是基于天空局部区域的点源式方法[8]。
清华大学的卢皓等提出了一种通过提取天空光偏振图像的特征来确定太阳方位角的方法。作者通过Hough变换将太阳子午线的二值图像变换到Hough空间,通过峰值确定了太阳方位角[9]。中北大学的学者提出了一种基于脉冲耦合神经网络(PCNN)的偏振光罗盘定向方法,该方法适用于恶劣天气条件,在晴朗天气下平均定向误差为0.180 5°,多云情况下的平均定向误差为0.878°,在晴朗的月夜下平均定向精度为0.712°[10]。北京航空航天大学的学者们研究了不同天气条件下的偏振光模式并基于偏振角的对称性提出一种新的导航方法[11]。大连理工大学的褚金奎团队基于线性灰度拉伸的Otsu阈值分割及3σ法则提出了一种具有鲁棒性的偏振光强度提取算法(去除传感器各个偏振方向的干扰像素),该方法定向精度为±0.25°,并且在室外有部分遮挡物的情况下表现出良好的鲁棒性[12]。国防科技大学的张文静等利用偏振角的对称性这一特点来确定太阳子午线,在多云情况下的定向精度在2°以内[13]。华盛顿大学和昆士兰大学的Powell等利用水下的偏振模式完成了地理定位。通过使用仿皮皮虾的水下偏振相机进行实验证明该方法的定位精度可达61 km[14]。
本文提出的用于多云天气条件下的大气偏振光定向方法能筛选出多云天气条件下分布区域最广的大气偏振模式,并根据该大气偏振模式得到最优的载体航向角,避免因云层遮挡和流动引起大气偏振模式不一致且不断变化,影响大气偏振光定向准确度的问题。
1 大气偏振光定向算法
1.1 大气偏振光定向原理
太阳光在经过大气层的散射后形成了具有偏振特性的偏振光,偏振光会以特定的规律稳定地分布在天空中。由于这种规律性,大气偏振光的分布图也被称作是天空的指纹[15-16]。
如图1所示,以观察者为原点建立天球坐标系,原点正上方就是天顶点。天顶点与太阳在天球坐标系上的点的连线就是太阳子午线。以太阳为中心向外发散的虚线环就是偏振光的分布图:每个虚线环上虚线段的切线方向就是天空偏振光E矢量的振动方向,虚线段的宽度代表最大E矢量的偏振度。由图1可知,偏振态的分布关于太阳子午线是对称的。
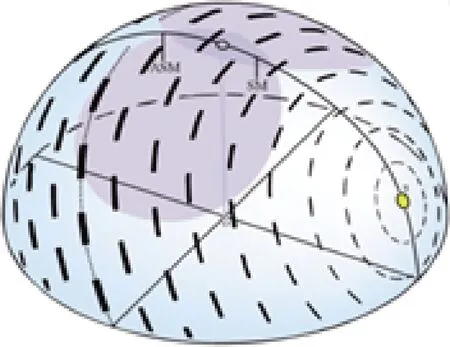
图1 大气偏振光分布示意图Fig.1 Diagram of polarized light distribution in atmosphere
为了便于理解,基于右手法则建立如图2所示的坐标系[17],φ为偏振角;α、γ为观测点的方位角和高度角;αs、γs分别为太阳的方位角和高度角。
相机坐标系(c系)OcXcYcZc:偏振相机与载体固联在一起,所以载体坐标系(b系)与相机坐标系重合。各个坐标轴的方向是右-前-上。
数据处理电路由单片机U1(PIC18F25K80)、电阻 R28、电阻 R1、电阻 R5、电容 C1~C3、电容 C10、晶振Y1、LED灯L2、接线端子J1等构成.将外部+24 V直流电源通过稳压电路单元接入接线端子J2的一端,接线端子J2另一端与电源芯片MC7805和MC7815相连,MC7805将24V电源转化为+5 V,MC7815将24 V电源转化为+15 V;+5 V直流电源用于为单片机和电流霍尔传感器供电,+15 V直流电源用于为电压霍尔传感器供电,而电源部分为通用电路.
入射光坐标系(i系):OiXiYiZi:Zi轴指向入射光的方向,Xi轴位于ΔOcPP′垂直平面内,Yi轴可以通过右手法则获得。为了简明,图2中省略了Yi轴。
由标准Rayleigh散射模型可知[18],天空偏振光的最大E矢量垂直于观测向量OP和太阳向量OS构成的平面ΔOPS,根据这一特性即可借助偏振光来完成定向[19]。

图2 偏振光定向原理图Fig.2 Schematic diagram of polarized light orientation
1.2 大气偏振光定向模型的建立
根据标准Rayleigh散射模型得到的几何关系,在载体坐标系下建立偏振光定向模型为
(1)

将式(1)整理成[16]
(2)

令
(3)
则由式(3)可得[16]
(4)
令a=Fxs,则
(5)
将式(5)代入式(4)可得
a(1)sinαsinγ-a(2)cosαsinγ=a(3)tanφ
(6)
可以将式(6)写成
(7)
令
(8)
则式(7)可以写成
hTx=b
(9)
式中:
h=[F(1)d(1)F(2)d(2)]
(10)
x=[cos(ψ+αs) sin(ψ+αs)]T
(11)
b=-F(3)d(3)
(12)
在测量出的每张偏振图像中,假设有k个有效的测量点,则有
[h1h2…hk]Tx=[b1b2…bk]T
(13)
将式(13)整理即可得到多测量点的偏振光定向方程:
HTx=bT
(14)
但是由于实际测量中存在误差,因此在上述的定向方程中需要考虑误差项,则将式(14)改写为
(H+Es)Tx=(b+es)T
(15)
式中:Es和es为实际测量中存在的噪声项。
将式(15)整理为
(16)
令B=[-bH],C=[-esEs],z=[1x]T,则式(16)可以写为
(B+C)z=0
(17)
利用全局最小二乘法求解上述方程,则可以将式(17)转化为求解以下目标函数:
(18)
即可知最优解zbest为BTB的最小特征值对应的最小特征向量[16],则对于式(17)的最优解xbest=z(2:3),那么根据式(11)可得航向角为
(19)
2 多云天气条件下的大气偏振光定向方法
天气是影响偏振光定向精度的重要因素,不同的天气状况会影响大气偏振光的分布特性和变化规律。传统的定向算法在晴朗无云的天气下能够获得较好的定向精度,但是当天空出现云朵时,传统定向算法的效果就会大打折扣,因此本文基于传统的偏振光定向算法,结合实际的天气情况,提出了一种用于多云天气条件下的大气偏振光定向算法。
1) 获取任意一个像素点的偏振光定向模型
随机选取一个像素点并算出该点处的高度角γo和方位角αo:
(20)
(21)
式中:(xp,yp)为观测点p在图像中的像素点位置;(xc,yc)为标定出来的相机主点像素;fc为标定出来的相机焦距。
利用选取的像素点并结合太阳星历,输入相应的时间和位置信息即可求得导航坐标系下的太阳高度角γs,太阳方位角αs,利用偏振相机的输出信息,通过最小二乘法即可算出偏振角φ。
基于以上信息,根据标准的瑞利散射模型,在载体坐标系下建立偏振光定向模型:
(22)
2) 利用随机抽样一致方法筛选出符合要求的内点
3) 利用选取出的最优模型解算出航向角
为了选取一个最适合的偏振光定向模型,重复步骤1)、步骤2),多次迭代,直到选取出一个能满足最多局内点要求的偏振光定向模型,基于此模型即可求出航向角。
3 实验验证
为了验证方法的有效性,在阴天多云情况下(2019年8月26日下午6:55-7:05)进行实验。在国防科技大学校园内某一天台处进行室外转动实验:将微阵列式偏振光罗盘固定在转台上,放置在水平处。转台共包含391个齿,每个齿约为0.920 7°,重复定位精度可以达到0.01°。
测试系统主要由FLIR偏振相机(采用SONY的IMX250偏振芯片)、笔记本电脑和高精度转台组成。偏振相机的焦距为8 mm,像素为2 048×2 448,每4个像素构成一个测量单元,偏振方向与参考方向的夹角分别为0°、45°、90°和135°,这样能够最有效地获取偏振信息,具体结构如图3所示。
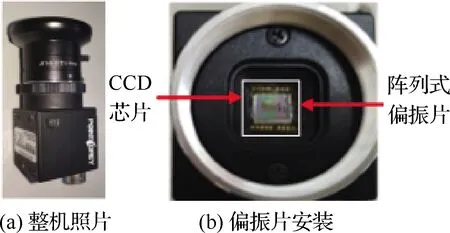
图3 偏振相机实物图Fig.3 Polarization camera picture
在实验过程中,旋转单轴转台,在多个位置采集入射光:转台从0位开始,每次旋转3个步长(30个齿),每个位置采集2帧图像。实验装置和实验过程图如图4所示。
由于云层是一直流动的,为了更好的说明天气情况,记录下这10 min内的天空云层变化图,如图5和图6所示。
图5和图6为经过处理的伪彩图,天空是淡蓝色,深蓝色、橘黄色和红色是云彩。从图中可以看到,云的数量由少变多,云层厚度也变厚,但是云层并未完全遮挡住全部的天空。为了验证本文提出的方法的有效性,利用文献[20]提出的一种较为常用的方法和本文提出的方法对这2组数据进行处理,结果如图7和图8所示。
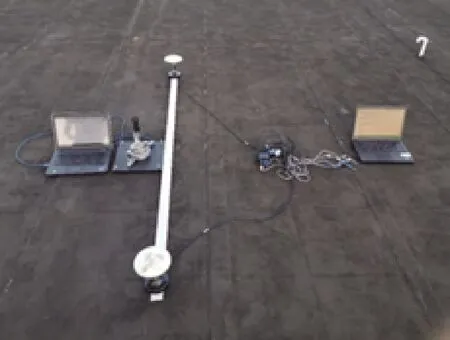
图4 实验装置图Fig.4 Experimental device picture
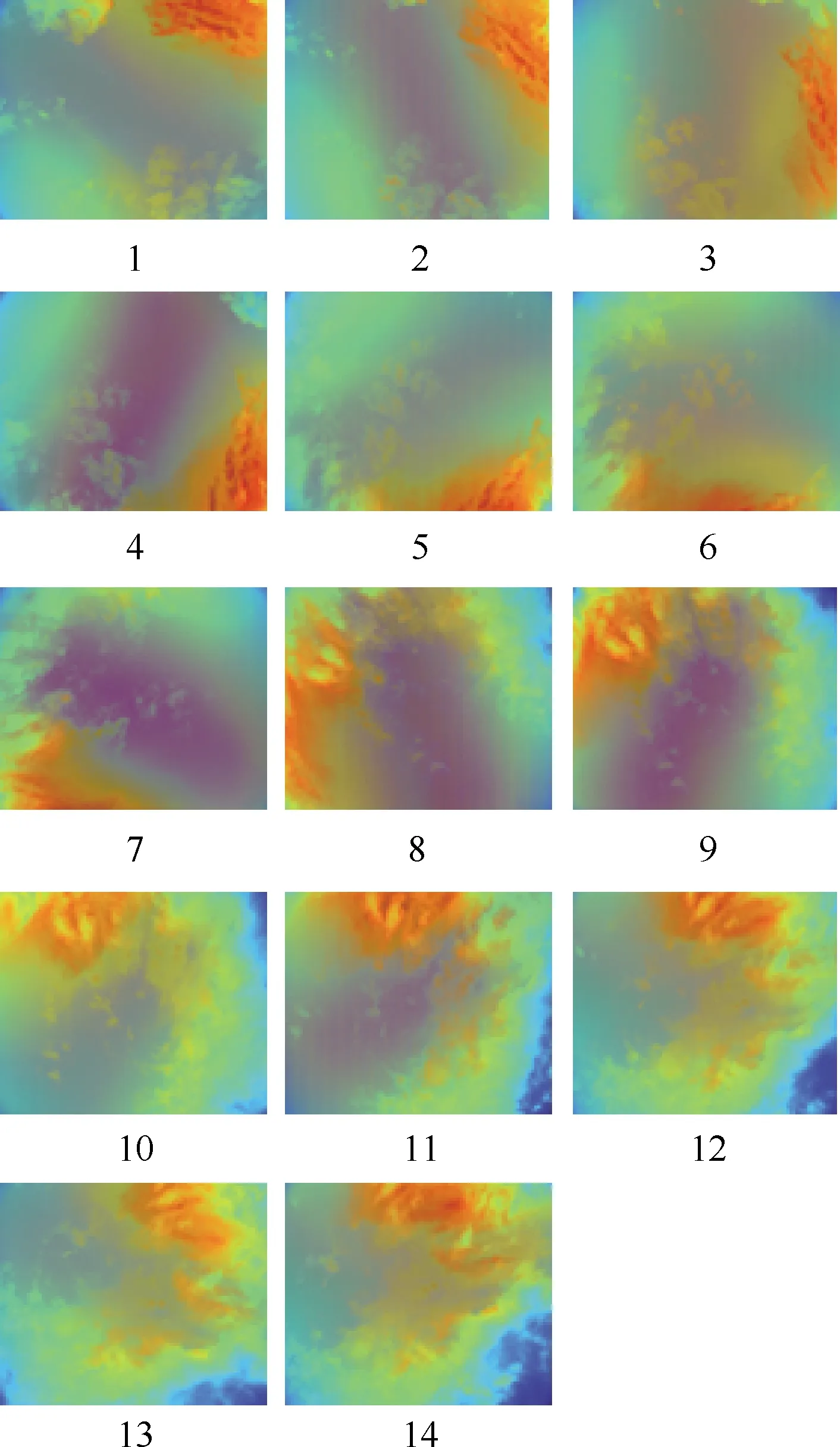
图5 少云情况Fig.5 Situation of partly cloudy
从图7和图8可以看出,在多云情况下的定向误差比少云情况下的定向误差大。在云层较为稀薄时,偏振相机采集到的偏振光更多,因此定向精度更好,结果较为稳定;在云层较为厚重时,光线无法穿透云层,偏振相机只能采集到未被云层遮挡部分的偏振光,因此定向精度较差。由图8可知,由于云层在实时流动,当云层由薄变厚时,定向精度也在发生变化。从图7可以看出,在少云情况下,2种方法的精度相差不大;通过表1可知,在少云情况下,本文提出的方法比文献[20]中的方法精度提高了25%。从图8可知,在多云情况下,本文提出的方法相比文献[20]中的方法更有优势;从表1可知,在多云情况下,本文提出的方法比文献[20]中的方法精度提高了42.5%。

图8 多云情况下2种方法的误差曲线Fig.8 Error curves of two methods in cloudy situation
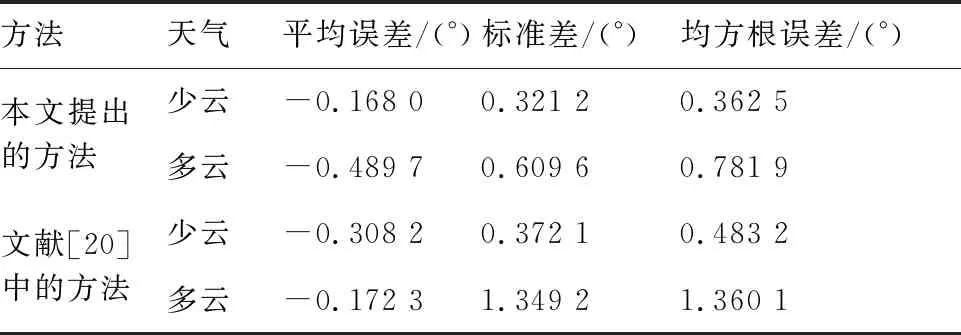
表1 误差对比Table 1 Error comparison
4 结 论
在少云和多云2种情况下,本文提出的方法的精度都优于文献[20]中的方法;本文提出的方法在少云天气条件下的均方误差为0.362 5°,在多云天气条件下的均方误差为0.781 9°。
本文提出的方法主要在室外进行了静态实验,下一步将通过动态实验进行验证。此外,光罗盘在多云天气条件下的定向精度与少云天气条件下的定向精度还有一定差距,下一步的主要工作是提高光罗盘在多云天气条件下的定向精度。
