电客列车ATO对标不准原因调查
2020-12-01熊蕴远
文∕熊蕴远
1 概述
地铁作为现代都市出行的重要交通工具,其安全、高效、便捷的运营模式,给人们的日常生活带来了诸多便利。作为地铁运营的一个关键指标,电客列车停站精度一直备受国内各地铁运营单位的关注。针对影响冲标/欠标事件发生不同的条件,国内已有不少文献从运行指标、解决方法等各方面提出了一些可行有效地方法:文献[1]详细定义了地铁ATO 系统性能评价的量化指标体系;文献[2]从设计角度论述了制约电客列车ATO 对标精度的因素;文献[3]详细描述了电空转换微机控制模型,并提出应对雨天空转/打滑闸瓦的选型标准、电制动过程中黏着限值的设定等方法;文献[4]从ATO 对标和制动原理及影响ATO 控制精度的因素,对广州地铁3 号线对标不准问题进行了分析;文献[5]描述了ATO 停车原理,并着重对制动过程中的电空转换进行了分析,说明了广州地铁5 号线对标不准的原因;文献[6]针对沈阳1 号线电空制动存在问题和解决措施提出了建议。
本文针对2016年至2017年某地铁线路频繁发生冲/欠标事件,未满足信号系统要求停站精度±0.5m 不低于99.9998%标准的情况进行调查。在排除雨天空转/打滑因素、信号系统传感器精度问题,列车电制动和电空转化过程不平顺等影响因素的基础上,最终把问题锁定在ATO 的一个开环校正环节。
2 原因调查
ATO 模式下列车的停车过程,按照文献[5]的描述:是列车实际速度跟踪一条恒定制动率的推荐速度曲线的过程。ATO 系统根据实时反馈的列车实际速度和列车位置信息,计算实际速度和推荐速度之间的差值,得出所需的制动指令值,传送给列车。列车根据制动指令值,计算所需的总制动力,根据情况由电制动执行,或者空气制动执行,或者两者都有。如果列车实际速度曲线能够与该速度曲线完全重合,则列车将完美的实现对标停车。但实际上,列车受速度检测误差、列车位置误差、制动力误差、轮对打滑等因素的影响,时刻都可能造成实际速度曲线偏离推荐速度曲线,此时ATO 系统会通过实际速度与推荐速度的差值,增加或减少制动力进行调整,使实际速度不断地跟踪推荐速度,直到列车速度为零。如果列车实际速度未能很好地跟踪推荐速度,造成列车停车后与服务停车点SSP 有一定差值,则出现列车冲/欠标现象。
实际控制时,由于速度变化缓慢,因此控制量选取的是列车的加速度。在列车行进的每一个特定点位,都有一个精确的加速度位置与之对应。其控制框图,如图1 所示。

图1 列车加速度控制示意图
从上图几个影响停站精度的关键因素入手,下文将分3 个环节进行调查分析和优化调整:(1)对雨天空/打滑因素、信号系统传感器精度问题,列车电制动不平顺问题的调查和分析;(2)对电空转换不平顺问题的调查分析;(3)对ATO 输出级位与车辆接收级位不一致(开环校正环节)问题的调查分析。
最后,在结论部分给出上述影响因素在地铁建设和运营的不同阶段应如何关注,如何排查。
2.1 针对信号系统传感器和电制动减速度突变的调查
2016年底,本文所涉及线路的地铁信号系统针对频繁发生的空转/打滑问题,在增加了雨天模式后,列车定位不准及由此引发的紧急停车问题得到了有效抑制。在本文分析过程中,将首先排除空转/打滑引起冲/欠标的情况。在此基础上,根据现场技术人员的描述,随后发生的冲/欠标事件是由于“车辆制动单元没有很好地响应信号系统给出的制动级位”,并且“减速度在低速时的突变”引起的。
对此,车辆技术人员首先对列车轮径和走行部进行测量对比,未发现走行部机械尺寸有明显异常问题。
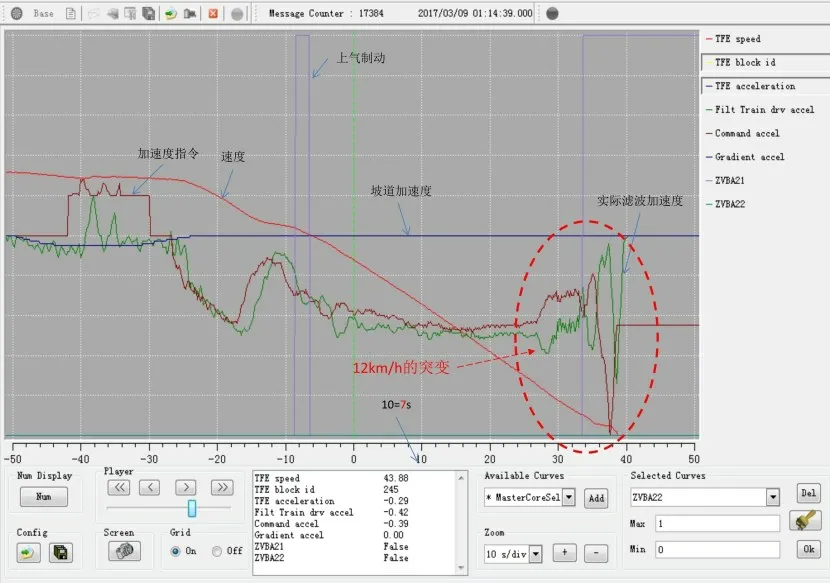
图2 对标停车情况下12km/h 时的减速度突变
从2017年某列车停站过程中采集的ATO加速度指令(图2 中棕色曲线)、实际滤波加速度(绿色曲线)、路况坡道加速度(蓝色曲线)、列车速度(红色曲线)以及上气制动情况(紫色曲线)可以看出:当列车速度降至12km/h 时,列车的实际滤波加速度与信号系统的加速度指令开始背离,并在列车停稳前,形成了振荡。考虑到动态停车过程存在各种因素的影响,随后在试车线进行了恒定级位下的制动测试,以重点观察影响加速度变化的因素,见下图3。
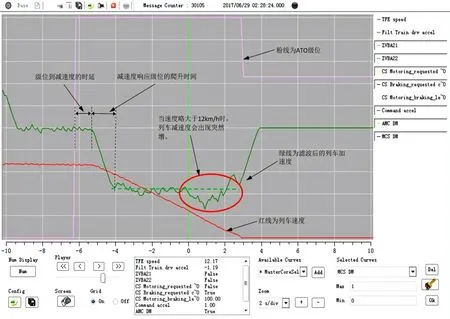
图3 固定级位停车情况下12km/h 时的减速度突变
图3 中(绿色曲线为列车滤波后加速度、红色曲线为列车速度、粉色曲线为ATO 级位),车速在12km/h 时列车减速度有明显波动的情况。但该波动引起的原因,是来自外部,还是来自车辆本身,有如下几个推断。由于试车线平直,且无其它外部干扰,因此外部影响可以基本排除;而内部因素,从减速度曲线突增的情况,可以推测出其直接影响因素有:(1)电制动力偏大;(2)空气制动预压力的施加;(3)信号系统测量误差。
在分别切除气制动和电制动进行测试后,采用第三方速度采集设备进行比照试验,基本可以排除第空气制动预压力和信号系统测量误差的影响。
经厂家对电制动程序进行了优化更新后,列车在固定级位下的制动曲线,有了较明显的优化。
2.2 针对电空转化过程减速度突变的调查
在消除了电制动减速突变带来的影响后,列车在测试过程中,5km/h~0km/h 阶段减速度仍存在较大波动,详见图4(曲线颜色说明同图3):

图4 固定级位停车情况下5km/h~0km/h 减速度波动
该速度段,列车制动处于电空转换过程。据设计文件对电空转换的约定(如图5 中第1种情况):当电制动到达退出时机(速度v0)时,电制动发出退出指令,延时⊿t 秒后,开始以-1m/s³的冲击率退出,同时气制动开始以1m/s³的冲击率施加,当电制动为零时,气制动保持此时输出压力,直至停车。基于此约定,是否可对电空转换过程进行优化,有如下几种备选方案:

图5 电空转换方案
图5 中的左边三个图和右边三个图,分别代表了两种电空转换方案。具体为:(1)固定点退出(图5 中1、2、3 种情况):当电制动发出退出指令,固定延时⊿te+⊿t 后,按=-1m/s³、>-1m/s³或<-1m/s³的冲击率退出;(2)浮动点退出(图5 中4、5、6 种情况):在预估气制动在经过延时⊿ta 后完全施加时列车速度刚好为vt,反推至气制动刚开始施加⊿te±⊿t 时刻,给电制动发出退出指令。
经对比,改进方案最终选定了第6 种情况,并取⊿te=0.45s,ke=-1.5m/s³。虽然在理论分析时,该方案中制动力有一个较大的叠加峰值,但实际运用效果刚好弥补了图4 中低速阶段减速度变小的情况。
2.3 针对ATO 输出级位与车辆接收级位不一致问题的调查
在优化了电制动和电空转换过程后,又经反复调查,基本排除气制动对恒定级位下列车制动曲线带来的影响。此时,调查焦点逐步锁定在了车载ATC 的控制策略上。
经在试车线反复试验,发现ATO 级位与牵引制动级位名称不一致,并且曲线变化也不完全一致。在不断深入调查后,厂家澄清了ATC控制器中的SRD PC MBC 级位是信号系统通过接口直接传给车辆系统施加制动的最终控制指令。并且在低速时,SRD PC MBC 级位与原始的牵引制动级位相比有一个大的突变(图6 中红圈内)。而正是这个突变造成了“列车实际加速度”(黄色曲线)在黄色箭头位置的突变。由于车辆系统无法快速响应信号指令的变化,导致列车在停车前加速度发生振荡。

图6 问题解决实施步骤
在厂家对SRD 级位优化和调整后,经重新辨识列车动态模型,对ATO 参数进行整定,正线冲欠标问题终于得到了有效地解决。
3 结语
由于信号系统的控制策略是基于把列车制动过程看作是一个一阶惯性加纯滞后环节来处理的,如果电/气制动以及电空转换过程不满足这个假设,那么控制器中针对一阶惯性环节的PI 控制和针对纯滞后环节的史密斯预估控制从模型到控制器的设计将是不准确地。因此在设计联络过程中至列车出厂前,需通过对列车动态制动特性的严格卡控,来获得精准的控制对象模型。在地铁开通至前新线调试过程中,还需在试车线进行固定制动级位下的停车试验,以获得一阶惯性环节和纯滞后环节的时间参数,以便用来计算控制器参数。在地铁运营过程中,如列车频繁出现停站不准的问题,应重新进行固定制动级位下的停车试验,以观察列车的制动曲线是否还严格满足投运时一阶惯性和纯滞后的特性以及参数,具备响应的平稳性。
从整个调查过程来看,为了查明停车动态过程中影响制动力平顺的因素,首先应针对列车静态制动过程(固定制动级位下的停车试验)进行试验和分析,逐步优化和排除各种影响制动曲线平稳性的因素,最后锁定影响制动力正常发挥的因素。
当问题因素逐步排出后,再针对查明的结果进行优化。从整个问题的解决过程来看,列车在固定制动级位下的静态响应曲线一定要逐级位进行优化,其响应特性一定要与理论的参考模型趋于一致,这样才能最终保证列车对动态制动指令的响应有较好的跟随特性。
同时信号指令在控制过程中不应快速大幅度波动,这样不利于车辆制动系统进行平稳跟随。
注意到落实以上几点问题后,才能保证整个停车过程平稳、精确地进行。
