城市污水除磷工艺系统的参数辨识与内模控制
2020-11-30郑勇峰梅文涛
郑勇峰,梅文涛
(天津渤海职业技术学院机电工程学院,天津300402)
本文借助于智能控制技术之一的神经网络进行了的非线性模型辨识,并进一步提出污水系统除磷工艺的BP 神经网络非线性时变系统的控制方案。
1 实验系统辨识数据
1.1 实验污水类型为:典型的城市污水,污水取自学院内污水处理厂的生活污水。
1.2 实验采用的工艺为基于ASM-1 和ASM-2d的典型城市污水生物脱氮除磷工艺。
1.3 实验周期为24h。因为一般而言同一季节内一个稳定的污水处理厂的变化周期大致为24h/d。
1.4 实验平均水量为1000 m3/d, 平均进水COD为 450 mg/L,BOD 为 195mg/L。
1.5 本次实验温度保持为15℃。
1.6 实验循环周期为60 次,泥龄为12d 左右。
由于污水处理是典型的生化反应过程,因此在数学处理中系统模型属于非线性的特性模型。
2 出水TP 正模型的辨识
本文借助于NARMAX 模型(非线性时间序列的带外生变量的自回归滑动平均模型)中的单输入-单输出形式,即:

其中:y(t)表示输出;u(t)表示输入;e(t)表示预测误差,在这里为零均值白噪声序列;ny为输入最大延迟;nu为输出最大延迟;式中的函数f(·)为非线性函数。本公式仅考虑了在系统的输出函数中加噪声的情况,是NARMAX 模型的的简化形式。
本次研究中采用BP 神经网络,算法Levenberg-Marquardt 算法,为在延时时间为d 个采样周期的假设情况下,采用此算法对网络进行权值训练。将公式(1)变换为如下所示的的非线性差分模型。

式中:C(q-1)ω(k)为白噪声序列;f 为非线性算子;u(k)表示k 时刻的系统输入;y(k)表示k 时刻系统的输出。d 为延迟时间,本次神经网络中延时时间通过试算后取d=3。
在神经网络结构上,隐含层单元的数量分别取为90、110 和120 不等,隐含层函数采用双曲正切S 型激活函数、输出层采用的是线性激活函数。本文为了进一步做对比分析,本文还采用了共轭梯度法等其他函数进行对比分析,数据如表1所示。
由表1 中数据可以得到对于污水处理系统的出水TP 正模型的辨识误差最大为0.0790998,就经验而言,对大多数问题,Levenberg-Marquardt 可以获得相对较好的结果。但是无法避免局部极小问题。
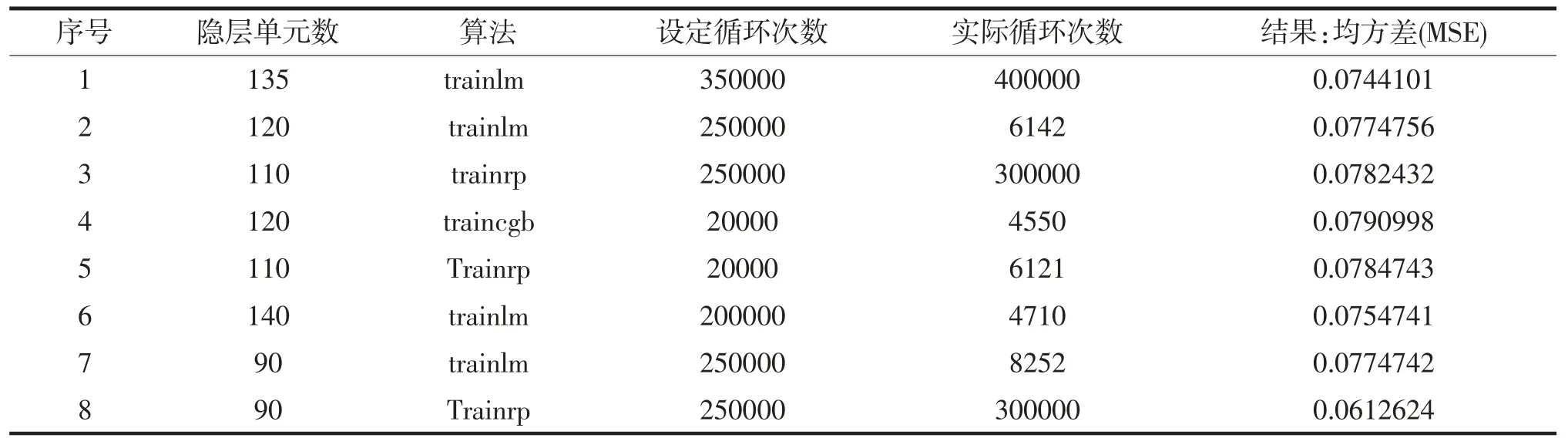
表1
3 出水TP 逆模型的辨识
如果要实现出水TP 参数的神经网络内模控制,还需进一步进行系统逆模型辨识这一过程。在泛函观点中,不论是线性的还是非线性的系统是由输入空间U 映射到输出空间Y 的算子;T∶U→Y反过来,其逆过程相当于由Y 映射到U 的算子T∶Y→U。
d 阶时延可逆系统的数学表达式为:

将d 阶时延非线性系统变换为d 阶时延逆系统P-1d的差分方程即其神经网络输出可写为:

其中V 表示神经网络的权系值。
在逆模型的神经网络分析中,选择与正模型分析中相同的参数,Levenberg-Marquardt 算法,隐含层单元为90、110 和120,双曲正切S 型函数,线性函数,模型数据如表2 所示。由表2 可得,模型误差较小符合预期。
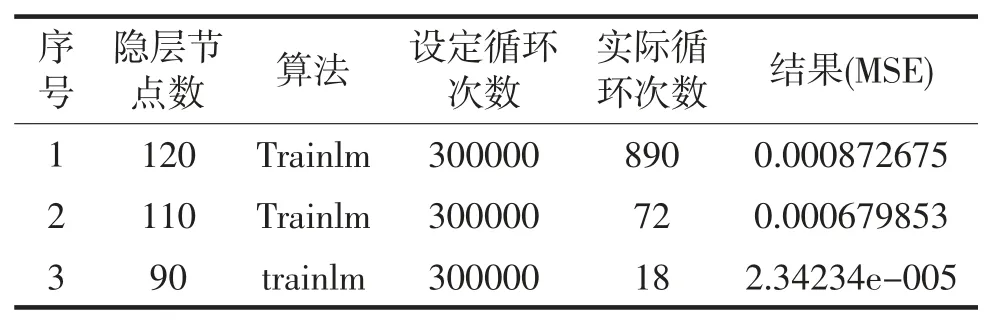
表2 出水TP 逆模型结果
4 出水TP 内模控制
虽然神经网络的非线性辨识优点很多,但是目前缺乏成熟可靠的神经网络集成芯片,因此对于实时控制场合适应性较差,因此神经网络对污水处理的大多应用在于数据处理后的单一控制场合中,本文通过神经网络对污水处理系统的出水TP 的正模型与逆模型辨识,提出内模控制原理,其原理如图2 所示。
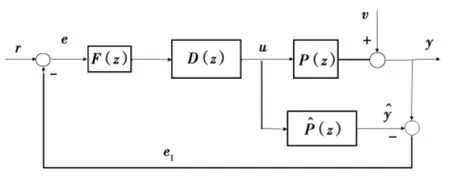
图2 污水系统出水TP 的神经网络内模控制原理
在图2 模型中,当模型P 与控制器D 相匹配时,扰动量被抑制,输入和输出相等;当模型与对象不匹配时,对于单位阶跃输入与阶跃扰动,由拉氏变换的中值定理求得系统稳态误差为零,如式5 所示。
5 结论
1)城市污水处理系统中生物脱氮除磷工艺为非线性系统,采用BP 神经网络进行控制效果较好。
2)基于BP 神经网络的出水TP 参数辨识过程中,正辨识中神经网络训练数据较大,存在局部极小问题,因此在前期需要较大数据进行训练,模型适应性不强,但是逆模型的辨识效果较好。
3)基于BP 神经网络的出水TP 内模控制方法,能够实现实时控制,将会对污水处理这种非线性时变系统起到加大作用。