基于正弦拟合的空间目标短弧关联算法
2020-11-30黄秋实张雅声冯飞
黄秋实,张雅声,*,冯飞
1. 航天工程大学,北京 101400 2. 北京跟踪与通信技术研究所,北京 100094
随着各国的航天发射活动日益活跃,全球航天器的数量呈现激增趋势。与此同时,大量的空间碎片也威胁着地球同步轨道(geosynchronous orbit, GEO)航天器的运行安全[1]。2002年,美国国防部曾提出控制空间的三大能力,分别是空间态势感知能力、进攻性空间对抗能力及防御性空间对抗能力。其中空间态势感知是探索太空及维护太空安全的基础。空间目标监视系统是空间态势感知的重要组成部分,其功能包括对空间目标识别、搜索、跟踪、编目以及定轨等。美国的空间目标监视能力全球领先,地基与天基的监视系统均在建设和不断发展中,同时也耗资巨大。以天基空间监视系统SBSS为例,3~8颗监视卫星的组网预计耗费8.58亿美元。天基监视系统不受地球大气的影响以及地球曲率的制约,功耗低,体积小,可以很好地与地基监视系统相互补充[2-3]。中国的天基监视系统亟待进一步的发展。笔者所在的实验室提出了天基泛在感知的概念,旨在利用卫星装备的星敏感器,在星敏感器定姿过程中拍摄的星图中检测和提取空间目标,并从大量数据中挖掘空间目标可用的观测信息,实现空间目标的监视,可节约发射专用监视卫星的成本[4]。与专用型监视卫星的跟踪观测模式不同,泛在感知系统依靠星敏感器视场和目标的自然交会捕获目标[5]。虽然每次连续观测的时间短,但星敏感器数量多,可实现对空间目标断续的在不同观测几何下的短弧观测[6]。文献[4]可依靠星敏感器提供的仅测角数据实现对空间目标的定轨,该方法的前提是实现空间目标的关联,以便将相同目标的测角数据应用于计算。本文要解决的重点问题是将星敏感器断续观测到的空间目标进行关联,并且能适应短弧观测下的关联需求。
1 问题描述
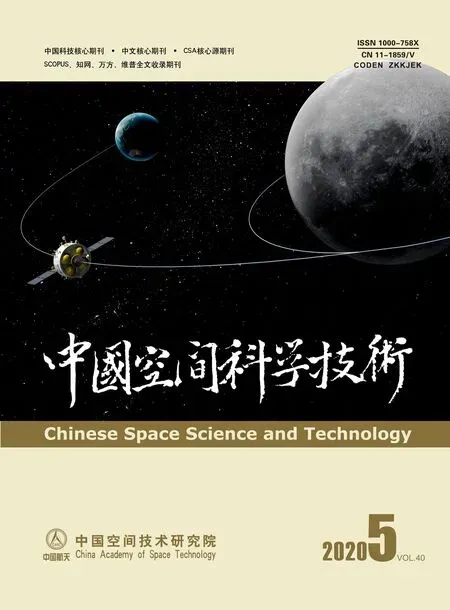
现役卫星大多正交安装两台星敏感器,因此卫星运动过程中,多台星敏感器的视线会自然交会,如图1(a)所示,并且空间目标在运动过程中会断续地进入多批星敏感器的视场,如图1(b)所示。高轨的空间目标的星等为10~12,主流星敏感器视场超过10°且极限探测星等为5.5~7。当前中国有种研创阶段的星敏感器的特点是小视场、高极限探测星等。文献[7]提出了一种以太阳同步轨道星敏感器为主的GEO监视的构型。选择12颗太阳同步轨道卫星、12颗晨昏太阳同步轨道卫星、4颗45°轨道倾角的卫星作为观测平台,进行星敏感器视场自然交汇模式下的GEO监视能力仿真,重点分析对[-15°,15°]纬度带内的GEO目标的观测效能。仿真时间为2020年3月20日00:00至2020年3月21日00:00,星敏感器的视场为2°×2° 观测效能如图2所示。
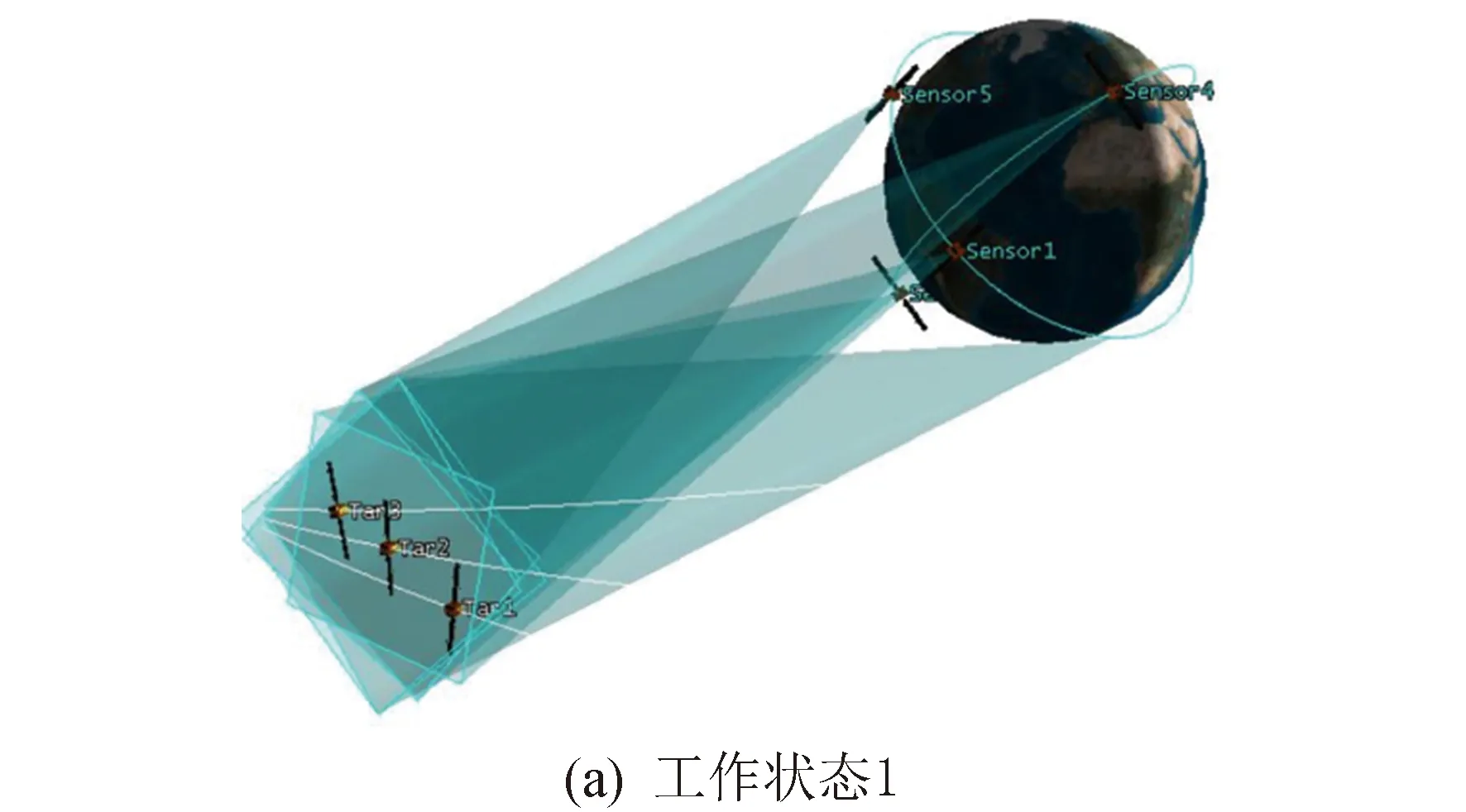
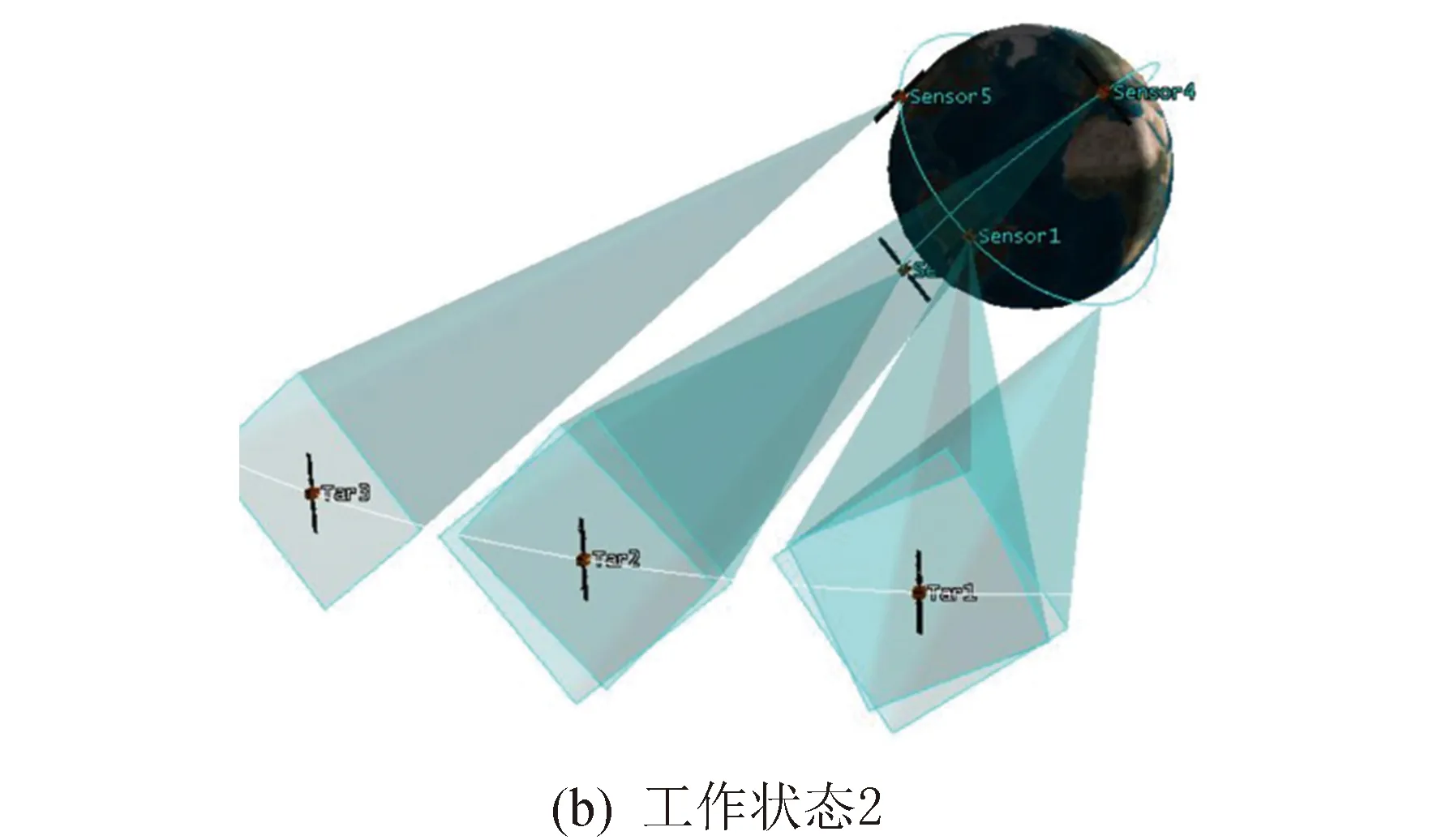
图1 星敏感器用于目标监视的工作状态Fig.1 Star sensor working status for target monitoring
图2(a)为[-15°,15°]纬度带内各区域同时观测的星敏感器的数目,可以看出95%的区域可以被超过两台星敏感器同时覆盖,且目标重访间隔为20~50 min。图2(b)为各区域目标的最大观测时长,可以看出部分区域最大观测时长小于180 s,难以通过短暂的观测确定目标初始轨道。本文重点解决短弧观测小的目标关联问题,将不同时间段多星敏感器对空间目标的短弧观测进行关联,找到属于同一目标的观测。
空间目标中断航迹关联的一般思路是根据新旧航迹的观测值推算空间目标轨道并获得新旧航迹相同时刻的状态估计,依靠欧式距离、马氏距离、模糊隶属度等指标评估新旧航迹的相关性[8]。由于星敏感器仅能提供对于目标的测角数据,此方法需要较长的观测时间以确定空间目标的初始轨道,当采用小视场星敏感器时,空间目标在星敏感器视场中停留时间过短,不足以确定初始轨道。文献[9]结合星敏感器在视线交汇
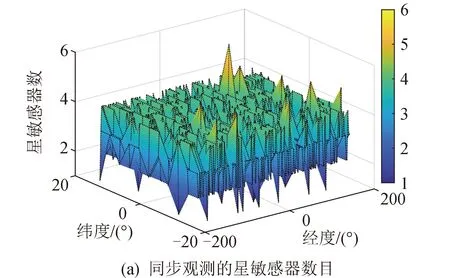
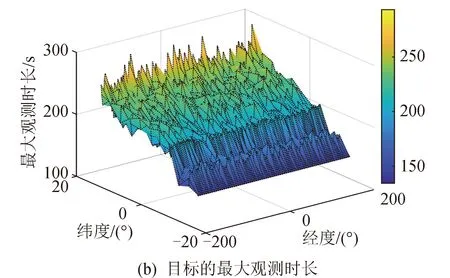
图2 星敏感器自然交会观测效能Fig.2 Observation efficiency of natural intersection of star sensors
时协同观测的工作状态,基于对极几何约束实现了空间目标的同步关联,并获得测角信息以及距离信息,确定空间目标的位置。意大利学者Milani提出了容许域的概念[10],在测量斜距和斜距变化率构成的二维平面对空间目标运动加以约束,可用于短弧光学测量的初始轨道估计。在实际应用中发现,将容许域进行剖分并搜索与观测值最接近的初轨运算复杂度较高,而且由于观测时间短和误差的存在,搜索的最优轨道与目标真实轨道可能有较大偏差,影响了关联准确率[11-13]。
目前对于空间目标短弧关联的主要思路有两种:一种是在容许域内搜索最符合短弧观测的轨道作为空间目标初轨,再利用轨道外推至关联时刻,以马氏距离作为关联准则[14];另一种是假设两端短弧为同一目标轨迹,利用边界条件求解假设条件下的轨道,将求得的轨道与实际观测进行对比[15]。上述两种方法都需要对空间目标航迹进行轨道确定,本文旨在提出一种无需定轨,仅依靠新旧航迹的观测值就可较准确判断航迹是否来自同一目标的短弧关联算法。
2 基于正弦拟合的空间目标短弧关联算法
根据大量对GEO的观测数据,空间目标在J2000坐标系下的赤纬会随着赤经呈现正弦分布,峰值近似为轨道倾角,即使是轨道倾角为0°的GEO轨道,如图3所示的GEO1也会呈现出峰值较小的正弦分布规律。
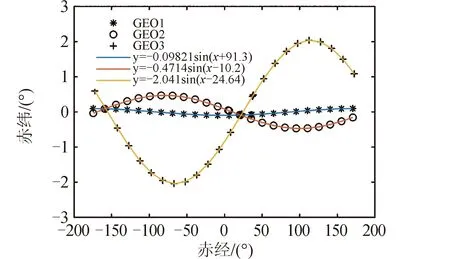
图3 空间目标目标的赤经赤纬关系Fig.3 Right ascension and declination relation of space target
尝试从轨道动力学角度推导上述规律。如图4所示为航天器星下点的球面几何图,在J2000坐标系下,X轴指向平春分点,i,ω,f,Ω分别代表轨道的倾角、近地点俯角、真近点角、升交点赤经,α,δ代表空间目标的赤经赤纬。根据赤经赤纬定义,SD所在的平面垂直于ND所在平面,因此二面角∠SDN为直角,∠SND=i(i∈[0,0.5π]),球面三角形SDN为直角球面三角形。根据球面三角形的性质可以得到:
tanδ=tanisin(α-Ω)
(1)
δ=arctan[tanisin(α-Ω)]≈isin(α-c)
(2)
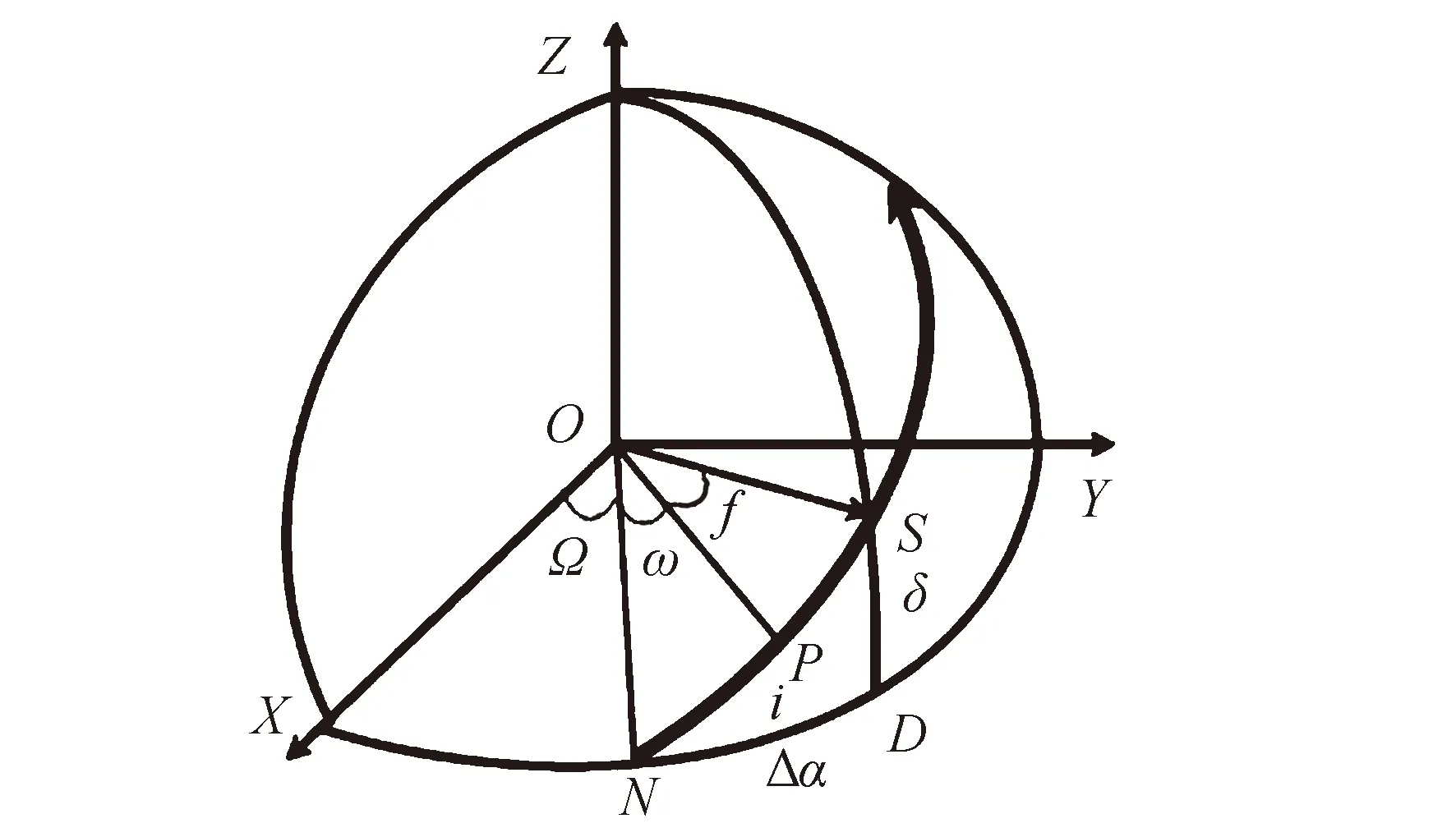
图4 航天器星下点球面几何示意Fig.4 Spherical geometry of spacecraft sub-satellite points
式(1)中tanδ∈[-tani,tani],δ∈[-i,i]。由于空间目标运行一周赤经的变化为360°,式(2)中复合函数的周期也为360°。因此赤纬随赤经的变化可由正弦型函数表示,c为常数。
经统计80% GEO目标的轨道倾角小于1°。当轨道倾角i<1° ,有c=Ω。证明如下:
arctan[tanisin(α-Ω)]-isin(α-Ω)=
tanisin(α-Ω)-isin(α-Ω)-

isin(α-Ω)≈0
因此可以验证基于GEO观测数据拟合的函数表达式的推测,GEO目标赤纬随赤经变化近似为正弦函数,且峰值与轨道倾角接近。
当获得空间目标在J2000坐标系下的赤经赤纬的观测值,根据间断短弧观测间的正弦拟合情况,判断新旧航迹的目标是否来自于同一轨道。
2.1 基于星敏感器的空间目标协同定位算法
星敏感器用于空间目标监视任务时,通常在多台星敏感器视场重叠时对目标观测[16]。因此首先需要将同一时刻多台星敏感器视场中的相同目标关联。由于空间目标距星敏感器较远可抽象成一点,两台星敏感器对空间目标观测的几何构型如图5所示,根据多视图几何相关原理,同一空间目标在两台星敏感器成像的像素坐标需满足对极几何约束:
(3)
其中p2和p2代表空间目标在星图上的像素坐标,第3维补1占位。F为3×3的基础矩阵,与星敏感器的位置,星敏感器坐标系的旋转关系,及星敏感器参数有关。星敏感器位置、姿态已知则F可求。将不同星图中像点坐标分别带入式 (3),计算结果越接近0,两像点为同一目标概率越高。目标关联示例如图6所示。
确定测角数据来自同一目标后,当同步观测的星敏感器数量为2台,可根据双目视觉原理求出空间目标的具体位置,当数量大于2时可根据最小二乘求解。
星敏感器提供的测角数据(α,δ)代表J2000坐标系下的空间目标相对星敏感器的赤经、赤纬。在J2000坐标系下,某一时刻空间目标的三维坐标为r(x,y,z),第i个星敏感器在空间坐标为Ri(Xi,Yi,Zi)。星敏感器到空间目标的方向向量和向量的模分别为ρ和ρ。根据观测几何可得:
r=ρρ+Ri
(4)
(5)
为消除未知量ρ的影响,在式(4)两侧同时叉乘向量ρ,得到:
r×ρ=Ri×ρ
(6)
展开得到:
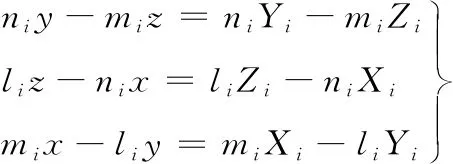
(7)
同一时刻目标的位置矢量r(x,y,z)为未知量,将其写成线性方程组的形式:
A·X=b
(8)
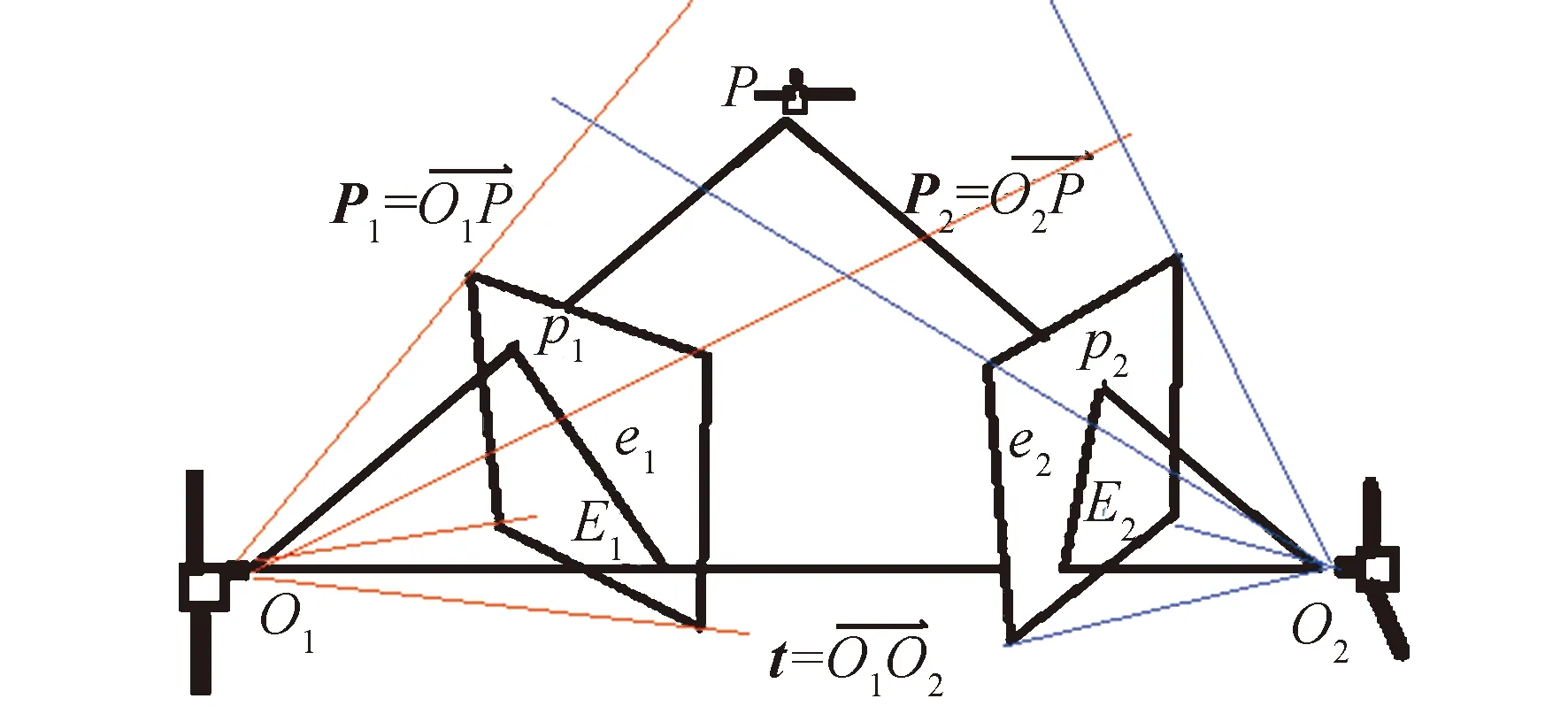
图5 星敏感器同步观测几何构型Fig.5 Geometric configuration of star sensor synchronous observation
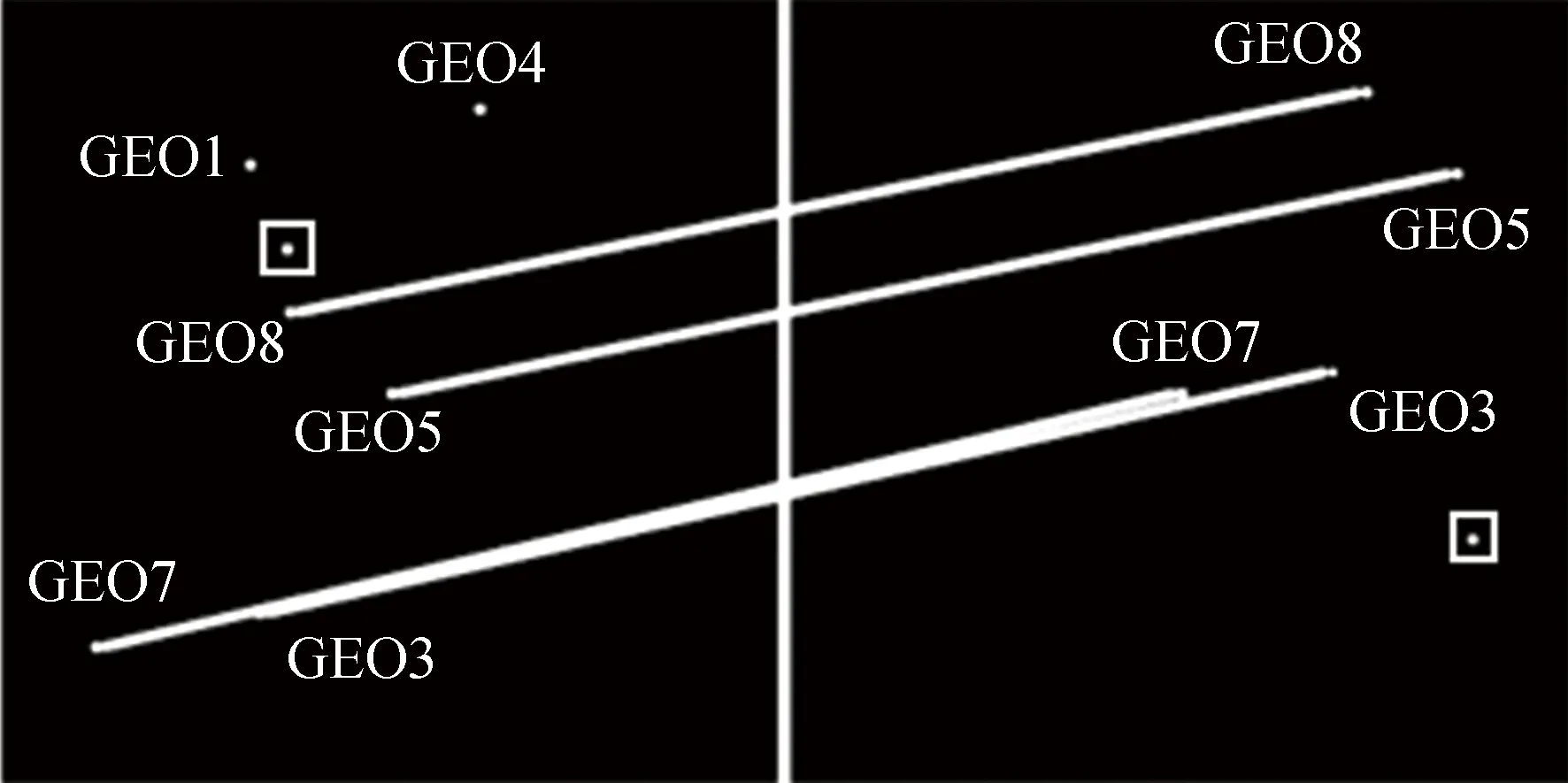
图6 空间目标同步关联示例Fig.6 Example of space target synchronization association

X=(ATA)-1ATb
若空间目标在J2000坐标系下的赤经赤纬为(α0,δ0),
2.2 基于正弦拟合的目标关联
由于一些重要的通信、广播、数据中继卫星均分布在GEO轨道,因此GEO轨道上的目标关联是重点研究对象,根据美国优思科学家联盟对在轨航天器的实测数据分析,80%的GEO轨道倾角小于1°且都为近圆轨道,98%的GEO偏心率小于0.007。图7展示了GEO轨道在J2000坐标系下分布密度,将赤经赤纬平面等分成100块,统计各块内GEO的数目。数目越大越接近红色,代表空间目标越密集,其中赤经[-160°,-150°]是GEO目标最密集的范围,赤经[-100°,-40°]仅有个别GEO目标,在卫星工具包(Satellite Tool Kit, STK)软件上观察,发现上述区域分别位于中亚和太平洋上空。赤纬0°附近有一条密集的GEO目标带,对此GEO带上的目标关联是研究的重点。
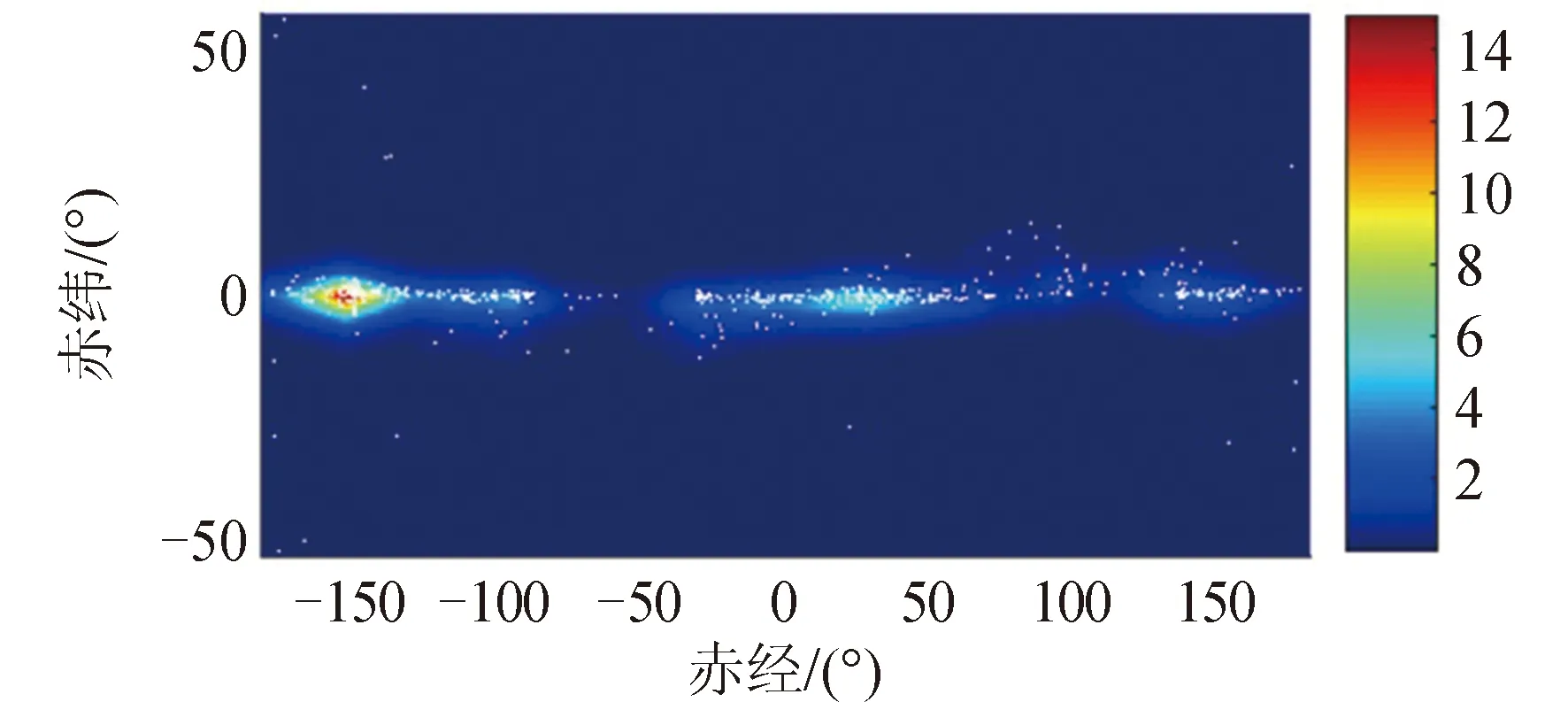
图7 GEO分布密度Fig.7 Distribution density of GEO
若J2000坐标系下,地心到旧航迹的起点向量为rold, 地心到新航迹的起点向量为rnew,新旧航迹采样点与地心距离的集合r中最大值为rmax,最小值为rmin,单位为km。两向量夹角〈rold,rnew〉为θ,单位为(°),T为新旧航迹间隔时间,单位为h。根据GEO目标运动特性加入轨道半径和角速度约束条件:

(9)
(10)
当GEO目标偏心率小于0.007,间隔时间T≤12 h时,空间目标与地心距离的变化量小于或等于50 km/h×Tkm。当T>12 h时,空间目标与地心距离变化量小于或等于600 km。
每一时刻,空间目标在J2000坐标系下的赤经赤纬为(αt,δt),因此目标的新旧航迹的观测采样值均落在以赤经为x轴,以赤纬为y轴的平面直角坐标系上,赤经赤纬的单位均为(°)。由于赤经的范围为[-180°,180°],因此空间目标在运动过程中赤纬随赤经变化趋势为周期为360°的正弦曲线,对新旧航迹观测采样进行正弦拟合:
y=asin(x+b°)
(11)
若残差平方和在阈值范围内,即:
SSE≤ε
(12)
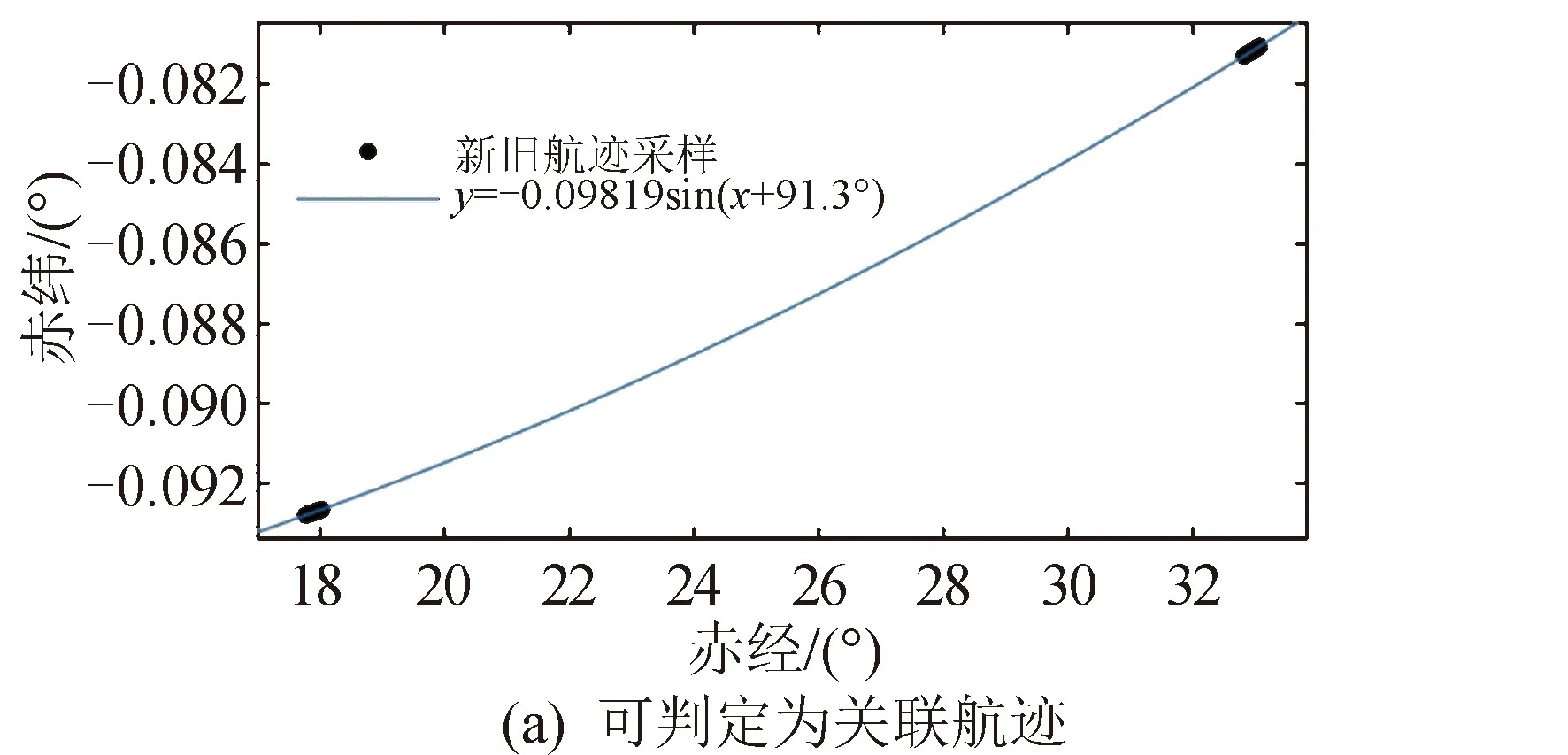
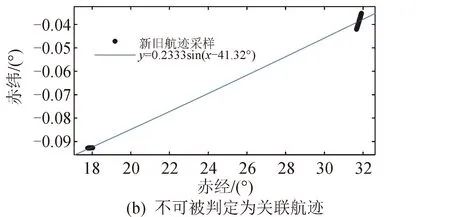
图8 中断航迹的拟合关联Fig.8 Fitting of track segments
可初步认为新旧航迹来自同一条轨道,如图8所示。对上述关联进一步检验并进行多义性处理,保证每条旧航迹最多与一条新航迹关联,每条新航迹最多与一条旧航迹关联,最终将正弦拟合残差平方和最小的新旧航迹定义为关联航迹。以m行n列矩阵A汇总关联结果,其中元素aij代表第i个旧航迹与第j个新航迹的关联结果。aij为0代表新旧航迹不关联,即来自不同目标,aij为1代表新旧航迹被判断为关联,可认为其来自同一目标[17-18]。
3 仿真校验
3.1 多星敏感器协同定位精度仿真
仿真利用STK平台搭建场景,进行200次的空间目标定位仿真,比较并计算出的空间目标赤经赤纬与真实值的偏差如图9和表1所示。分析可知利用星敏感器协同定位误差的主要来源分别是星敏感器所在卫星的位置误差与星敏感器对空间目标观测的测角误差。因此仿真中引入了3组不同水平的高斯白噪声(1″,100 m),(2″,100 m) ,(2″,1 000 m),分别代表星敏感器测角误差的标准差为1″,2″,2″,星敏感器自身位置误差的标准差为100 m,100 m,1 000 m。
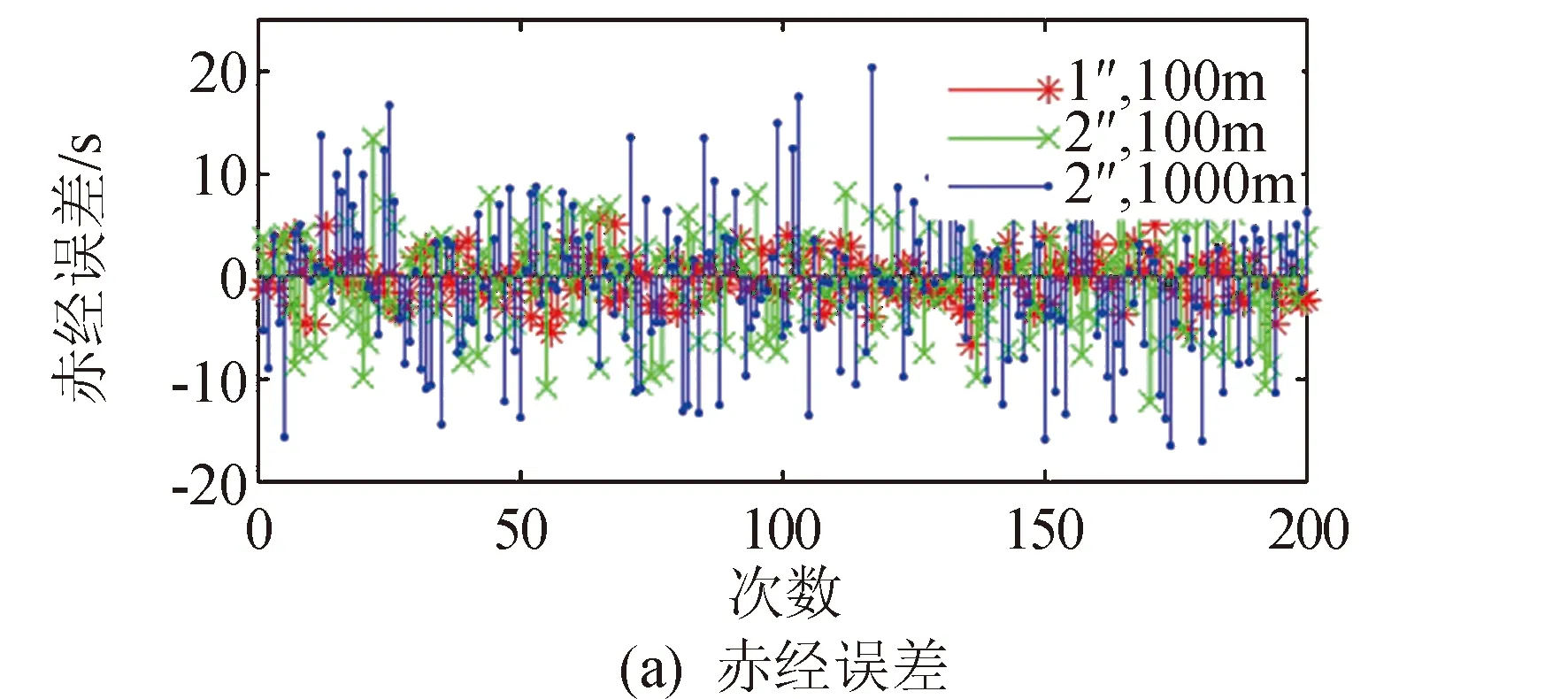
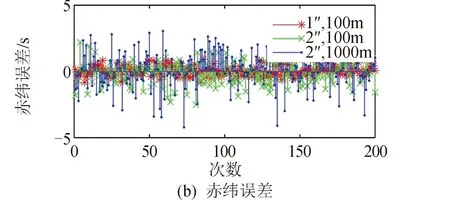
图9 多星敏感器协同观测赤经赤纬定位误差Fig.9 Right ascension and declination positioning error under multi-star sensor
3.2 空间目标短弧关联仿真
仿真中的空间目标数据来自于美国优思科学家联盟对在轨航天器的实测数据。仿真中加入3组噪声水平,分别为(1″,100 m),(2″,100 m),(2″,1 000 m)。新旧航迹的间隔时间为1~10 h,每组噪声下进行200次关联仿真。为了验证短弧关联效果,新旧航迹段的观测时长均不超过2 min,最短航迹为50 s。关联结果有4种可能,即正确关联相关目标、正确拒绝不相关目标、错误关联不相关目标、错误拒绝相关目标,其中前两者属于正确关联,统计仿真中算法的正确率。
当待关联对象为GEO目标时,由于赤纬的变换范围极小,以拟合的残差平方和判断航迹相关与否区分度不明显,因此仿真中对赤纬数据统一放大1 000倍,可以区分轨道倾角相差0.01°的空间目标。由式(9),对于一个GEO目标,运动时长T后,其位置的不确定范围为以它真实位置为圆心,50 km/h×T为半径的球。因此当间隔时长T≤12 h时,T越大空间目标的不确定范围越大,因此关联的准确率会随间隔时间下降。噪声条件下的关联准确率如图10所示,由图可知,当新旧航迹间隔3 h时,3种噪声条件下,关联准确率均达到90%以上,而目标被星敏感器观测的间隔时间一般小于2 h,因此本文算法可以适用于星敏感器下空间目标的航迹段关联。
仿真中发现,关联准确率与残差平方和的门限值有关,当门限值取得过小会导致错误的拒绝相关目标,门限值取得过大则可能导致错误的关联不相关目标。根据仿真,若一段航迹采样点数为N,关联准确率最大的门限值ε取值范围为[0.2N,0.75N],本文关联门限取0.25N。
图11为仿真中两条旧航迹与新航迹集合的拟合关联过程。图11(b)中旧航迹与两条新航迹的正弦拟合残差平方和均在阈值范围内,依据式(11)(12)的约束,最终将新旧航迹正确关联。
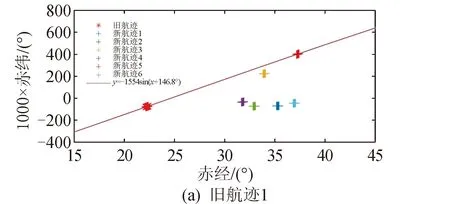
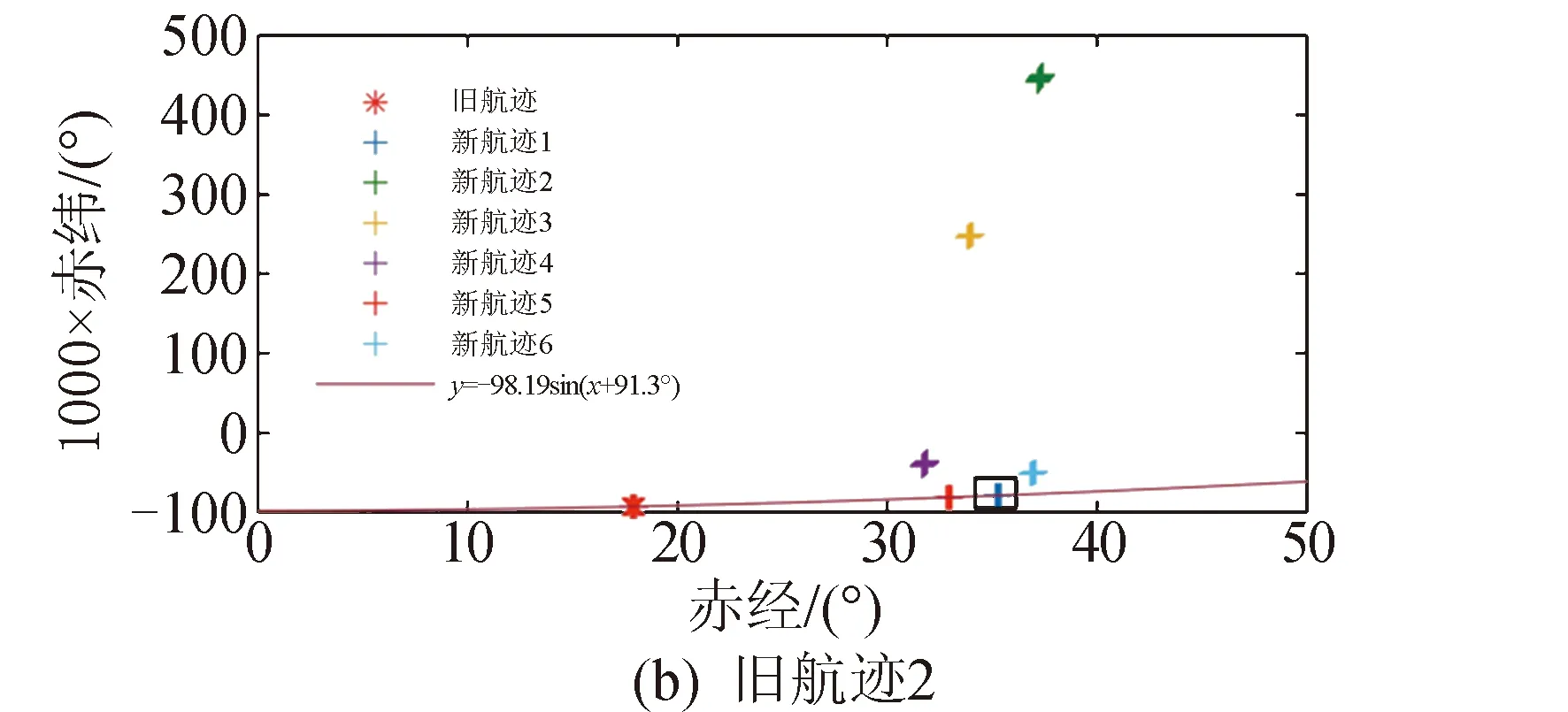
图11 旧航迹与新航迹的拟合关联过程Fig.11 Fitting process between old track and new track
将本文算法与基于容许域和基于模糊关联的航迹段关联算法进行对比。噪声选择为更接近工程实际的(2″,100 m),拟合关联门限取0.25N。如表2所示,可以看出本文算法的优势是运算快,无需定轨,可以适用于短间隔、快速响应的任务需求。随着未来星间链路[19]、星地链路的建设[20]及空间信息网络[21]的发展,快速响应算法有助于星上即时关联的实现,本文算法的局限性是需保证协同观测的传感器数量至少为2台。
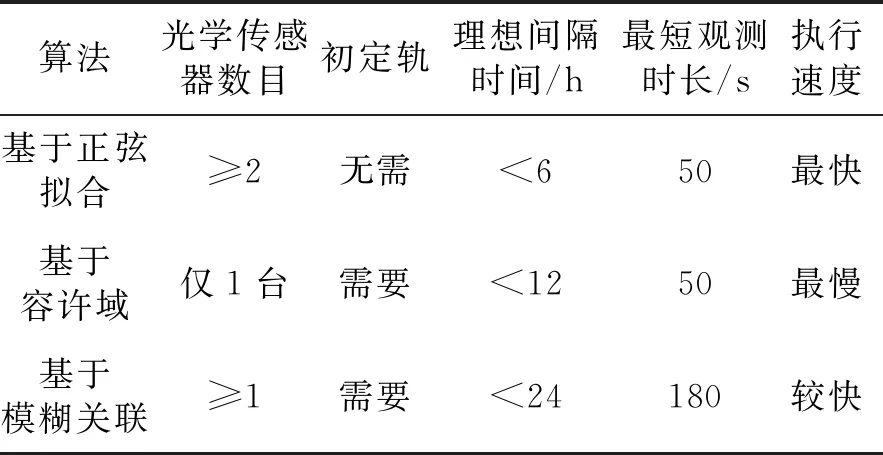
表2 中断航迹关联算法对比
4 结束语
本文应用多星敏感器下空间目标同步关联结果计算空间目标位置。在仿真噪声条件下,赤经赤纬误差为角秒级,其中星敏感器自身位置误差的标准差为100 m,测角误差的标准差为2″时更接近工程实际中的噪声水平。在此噪声水平下,空间目标赤经误差的标准差为4.94″,赤纬误差的标准差为0.93″,可以满足后续关联的精度需求。
通过将空间目标赤经、赤纬进行正弦拟合,可以较好地区分轨道倾角不同的轨道,采用余弦拟合效果相同,但是对于处于相同轨道但相位不同的空间目标或仅轨道高度不同的目标缺乏区分能力。因此若目标关联对象为GEO目标时,需要根据GEO目标运动规律加入半长轴以及运动角速度约束。
本文算法无需进行初始轨道确定,是一种简便快捷的短弧关联算法。本文最短关联50 s的观测短弧,当观测弧段更长时方法依然适用,且关联准确率更高。本文算法更适用于间隔时间小于3 h的航迹段关联场景,当新旧航迹间隔3 h时,本文3组噪声水平下的关联准确率均达到90%以上。