基于Sentinel-2 影像分辨率提升的西南山区油菜作物识别研究
2020-11-25欧嫣然王克晓
欧嫣然,王克晓 ,虞 豹,黄 祥,王 茜
(1.重庆医科大学公共卫生与管理学院,重庆 400016;2.重庆市农业科学院农业科技信息中心,重庆 401329)
0 引言
【研究意义】采用较高空间分辨率的遥感影像和增加对待分类地物的敏感波段是提高农作物识别精度的两个重要手段[1]。对于地形复杂地区,利用高分辨率影像和农作物对不同光谱波段的响应特征是有效提高农作物识别精度的重要途径[2]。【前人研究进展】近年来,搭载红边波段传感器的卫星越来越多,比如德国Rapid Eye 卫星,美国Worldview-2 卫星,欧洲航天局的Sentinel-2 卫星等,这些影像数据为开展农作物遥感识别与应用研究提供了充足的数据保障。其中,Sentinel-2 新型遥感影像以其特有的多波段、重访周期短、免费等特点,已被广泛应用到各个领域[3-5]。Selva 等[6]提出了从较高空间分辨率的多光谱/高光谱数据中提取空间信息与较低空间分辨率的多光谱/高光谱数据融合的方法。Wang 等[7]、梁丽娟等[8]以Sentinel-2影像为数据源,利用多种方法从10 m 分辨率的可见光及近红外波段中产生高分辨率波段,对其他波段进行融合。但上述研究仅通过蓝色、绿色,红色和红外波段合并而成的一个虚拟的全色高分辨率波段,会在和其他波谱范围内的波段融合时产生光谱伪影,影响地物在其他波段上的光谱特征[9]。张焕雪等[10]利用CBERS-02B 数据,构建不同分辨率遥感影像序列,讨论了空间分辨率对分类和面积估算精度的影响。孔令婷等[11]基于Landsat-8 和ZY-3 多种分辨率的遥感数据,对分类方法效果以及分辨率变化对面向对象分类方法的精度影响进行分析。王利民等[12]基于GF-1WFV、MODIS、Landsat-8、Google Earth 等数据分析了多个空间分辨率尺度下冬小麦识别精度与空间分辨率的关系。【本研究切入点】目前,国内外较多农作物遥感提取研究主要集中在平原地区。对于地形复杂、地块破碎地区,利用仅包含可见光与近红外波谱且为中高空间分辨率的遥感影像进行农作物信息提取,识别精度有限。西南地区是我国冬油菜的主产区,分析不同空间分辨率与光谱条件下地形复杂地区油菜遥感识别能力能够为我国西南山区油菜作物遥感识别研究提供数据空间尺度和光谱选择参考,也可为其他农作物遥感提取提供相关借鉴。【拟解决的关键问题】为探索不同空间分辨率与光谱条件下低山丘陵地区油菜遥感识别能力,本研究运用几何超分辨率影像重建模型和多光谱图像融合技术,并分别对融合后10 m 及2 m 分辨率的Sentinel-2影像以及2 m 的GF-1 多光谱影像构建随机森林模型进行油菜信息提取、精度评价和不同光谱条件下油菜识别能力进行对比分析,为我国西南低山丘陵复杂地区农作物遥感识别研究提供参考。
1 材料与方法
1.1 试验区基本信息
如图1,试验区位于重庆市合川区铜溪镇与渭沱镇沿涪江分界处,地理坐标为东经106°10′18.1″至106°11′56.3″、北纬29°59′58.2″至30°01′3.5″,属亚热带季风气候。地貌以低山、丘陵为主,地块破碎,地物复杂多样,作物主要以水稻、冬油菜及春玉米等为主。其中,冬油菜11 月份移栽成活,12 月至次年2 月中旬为现蕾-抽薹期,2 月下旬至3 月中旬开花,3 月下旬结荚,4 月份绿熟、黄熟。成像时期水稻处于育苗期,水田及玉米尚未播种,油菜发育处于结荚-绿熟期。
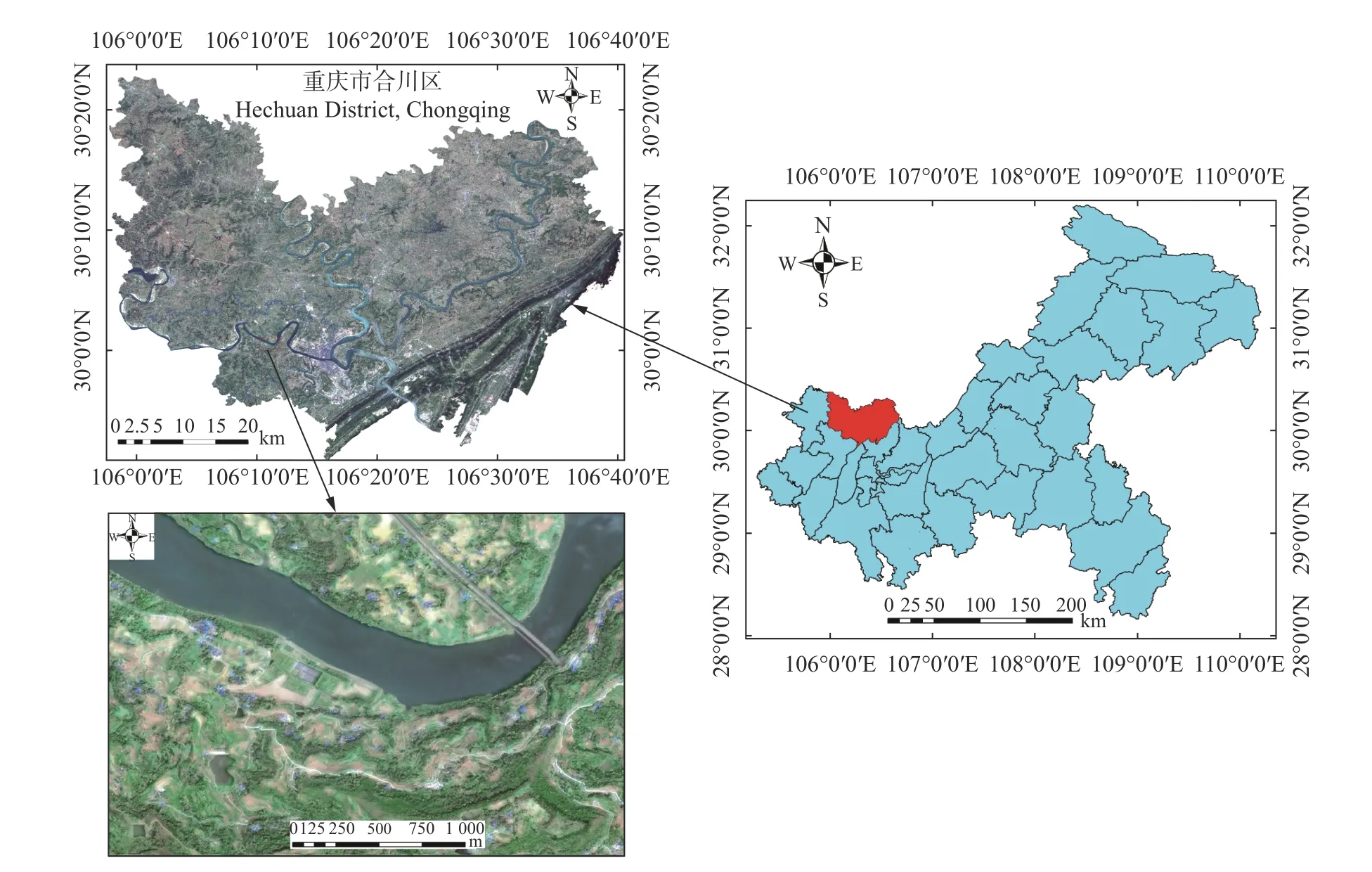
图1 试验区位置Fig.1 Location of test area
1.2 遥感数据获取与处理
本研究主要采用Sentinel-2 多光谱数据和GF-1 影像数据,参考系为WGS-84 坐标系。其中,GF-1 数据空间分辨率为2 m,成像时间为2019 年3 月29 日。Sentinel-2 数据为2019 年4 月7 日成像的L1C级产品数据,为正射影像且经过辐射定标、去噪等预处理,并与GF-1 号全色影像进行几何配准。本研究所采用的Sentinel-2 影像部分波段波长及空间分辨率信息如表1。
本研究主要涉及的数据处理平台主要有Sentinel系列影像处理平台Sentinels Application Platform(SNAP)、可视化遥感图像处理平台The Environment for Visualizing Images(ENVI)、地理信息系统分析平台ARCGIS 及遥感数据处理工具包EnMAP-Box。其中,SNAP 主要用于Sentinel-2 数据处理及图像重建,ENVI 主要用于多光谱图像与全色图像融合,ARCGIS 主要用于影像样本点选取、样本点光谱特征提取与光谱库构建,EnMAP-Box 工具包用于遥感图像作物分类识别。
1.3 地面光谱数据采集
采用美国生产的ASD FieldSpec HandHeld 2(ASDHH2)手持式地物光谱仪对试验区主要地物类型进行地面光谱数据采集,获取不同地物光谱曲线,以确定遥感影像各波段中心波长在光谱曲线中的位置和影像红边波段在不同地物中的不同响应。

表1 Sentinel-2 影像多光谱波段信息Table 1 Multispectral band information on Sentinel-2
1.4 试验方法
1.4.1 高分辨率图像融合 首先利用SNAP 7.0 平台,完成Sentinel-2 影像中4 个20 m 空间分辨率的红边波段重建为10 m 的分辨率操作,由此获得涵盖可见光-红边-近红外等8 个10 m 分辨率的波段数据集;然后通过ENVI 5.3 完成上述数据集与2 m 的GF-1 全色波段的Gram-Schmidt 变换融合,最终获得2 m 分辨率且涵盖可见光-红边-近红外等8 个波段的图像融合数据集。
Sentinel-2 数据涵盖可见光-红边-近红外-短波红外等范围内的光谱波段,但缺少全色光谱波段。对此,Nicolas Brodu[9]通过识别相邻像素之间的通用“共享”几何信息,提出了独立几何超分辨率多光谱多分辨率影像重建模型。其模型表达式如(1)~(4):

其中,L为低分辨率像元观测值,H为高分辨影像像元值,Sx,y为邻近相关高分辨率影像像元反射率,W为邻近相关高分辨率影像像元对应权重,一般情况采用等权重。
该模型提出利用高分辨率波段编码地物几何细节,作为独立于其反射率的像素属性,运用于低分辨率波段,在提高低分辨率波段数据空间分辨率的同时,保留其多光谱特征不变。其模型算法内置集成在SNAP 平台第三方插件Sen2Res 中,可通过选择分辨率参数实现20 m 波段到10 m 的分辨率重建过程。
Gram-Schmidt 变换融合是先将多光谱图像进行正交变换,然后将全色波段图像替代第一空间,再进行反变换获取融合图像。该方法融合后得到的影像特征,改进了主成分分析中第一主成分的信息过分集中的问题,不受波段限制,可较好保持影像的空间纹理细节信息与光谱特征[13]。此融合过程在ENVI 5.3 平台中自动完成。
1.4.2 样本选取与地物光谱库构建 根据影像数据成像时间,将研究区主要地物类型划分为水体、林地、水田、油菜、道路、人工建筑等6 个类型。结合试验影像数据近期的Google 高清卫星影像选取200 个地物点(图2),按照地物属性分层随机取样40%用于样本训练,剩余60%作为验证样本点用于提取精度评定。

图2 样本点选取Fig.2 Distribution of sampling points
基于ARCGIS 10.2 平台将训练样本点加载到不同空间分辨率的多光谱影像中,获取对应地物类型样本灰度均值,构建各地物类型光谱库。通过比较地物在不同空间分辨率数据上的灰度曲线,判断影像空间分辨率提升过程中作物光谱变化差异。同时利用ASD-HH2 手持地物光谱仪采集该时期油菜、道路、草地、水田及裸地等典型地物光谱曲线,确定不同地物的红边波段反射特征,为波段组合时选择红边波段提供参考。
1.4.3 分类识别及特征波段的重要性度量方法 随机森林是一种以决策树为基学习器的集成学习算法,已广泛用于遥感地物识别研究。基于大量随机生长决策树,随机森林算法输出的类别由所有决策树输出类别的多数而定,其模型建立主要涉及两个参数,即决策树数ntree 和决策树内部节点随机选择特征数mtry[14]。建立在CART 决策树基础上的随机森林,对于缺省值问题也能够获得很好的结果,有更强的数据挖掘、泛化能力和更理想的分类效果,已逐步发展为分析复杂地区遥感数据的有效集成分类器之一[15]。为此,本研究基于EnMAP-Box 工具包中随机森林分类算法确定模型决策树数目,节点分裂时以默认输入的特征变量数 mtry=(M为特征变量个数)进行分类。油菜提取精度通过验证样本点的混淆矩阵计算制图精度、用户精度、总体精度和Kappa 系数等指标进行比较[3]。
利用随机森林分类法可以进行特征波段的重要性度量,其主要是通过一种bootstrap 的小样本估计总体值的非参数方法。随机森林训练子集主要通过bootstrap 抽样技术从原始训练集中得到,未被抽取数据组成OOB(out - of -bag)数据。OOB 数据主要用于对决策树的性能进行评估,计算模型的准确率。随机森林分类法进行特征波段的重要性度量计算方式如下[16]:
1)通过训练子集Z构建随机森林模型,设第i棵OOB 数据集为,对应的OOB 分类准确度(accuracy)为Ai;
2)对于任意特征f,随机置换训练集中特征f的值,得到新的训练子集,计算决策树i的准确率则决策树i的原OOB 准确率与特征随机置换后的OOB 准确率差为(i=1,…,n)。
2 结果与分析
2.1 图像融合质量评价
融合图像质量评判通过定性与定量两方面结合进行评价,融合结果如图3。目视可见,在纹理细节表现方面,人工建筑物、绿色植被、道路与桥梁、河流及塘泊等地物清晰可见,纹理细节明显增强。
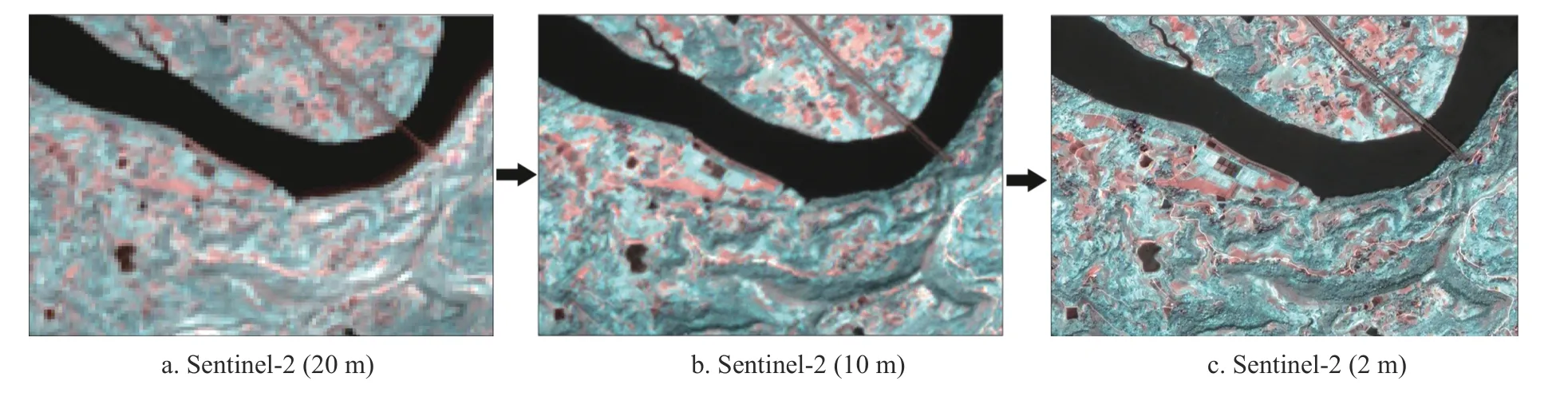
图3 不同分辨率下融合图像比较Fig.3 Fusion images of different resolutions
表2 所列指标值变化反映了Sentinel-2 影像从10 m分辨率提高至2 m分辨率前后图像在亮度、空间信息以及光谱保真度等方面的融合质量[17,18],可以看出,融合后图像各波段均值均有所增加,标准差所反映的像元灰度相对于图像灰度平均值的离散程度均有所减小;各个波段图像融合前后平均梯度值均有所增加,其中增值最小的为B2 波段,增加3.74;增值最大的为B5 波段,平均梯度值提高8.98,融合前后图像亮度有所提升。融合图像B2、B3、B4 等可见光波段信息熵微小下降约0.02,其他各波段均有所提高。整体上融合图像细节反差和纹理变化的表达能力均得到增强,图像的清晰度有较大提高。相关系数反映了两幅图像光谱信息的相似程度,相关系数大于0.7 则说明两图像具有较高的光谱一致性[19]。本文图像融合的各个波段相关系数均在0.75以上,其中红边、近红外及短波红外范围内的几个波段相关系数高达0.85 以上,融合前后图像光谱特征相似程度较高。
2.2 样本点灰度值与特征波段光谱分析
不同空间分辨率条件下各种地物的灰度曲线如图4,可以看出,各种地物类型融合前后变化总体趋势基本一致,油菜与林地均呈现出明显的绿色植被光谱变化特征,但林地曲线值相对较低,油菜曲线值相对较高。在B5-B8A 的红边-近红外光谱范围内,油菜与林地具有明显的可区别特征。
利用ASD-HH2 手持地物光谱仪采集该时期油菜、道路、草地、水田及裸地等典型地物光谱曲线如图5(B2-B8A 等波段波长信息见表2)。油菜与杂草地的绿色植被光谱特征明显,油菜作物反射率整体高于草地,反射率在红边波段B5 位置开始明显区分,红边B6 位置达到最大区分,红边B7 位置达到稳定。
通过主要地物灰度曲线与典型地物光谱曲线的遥感数据趋势可以看出,油菜作物与林地、草地等光谱特征均在红边B5 波段位置能够区分,红边B6 位置达到区分最大,趋势较为一致。
2.3 不同空间分辨率下油菜识别精度对比
基于前述选取的包含水体、林地、水田、油菜、道路、人工建筑等类型的80 个地物样本点,利用EnMAP-Box 工具包中的随机森林算法对不同分辨率的遥感图像进行油菜提取,分布结果如图6,不同分辨率下分类精度如表3 所示。可以看出,对于同源数据的Sentinel-2 而言,特征波段数量相同,提高分辨率能够有效提高地物信息分类精度,总体精度由72.29%提高到79.52%,Kappa 系数从0.66 上升到0.75;对比Sentinel-2 与GF-1 数据,在同等分辨率条件下,尽管地物分类总体精度和Kappa 值有微小变化,但由于Sentinel-2 数据涵盖对绿色作物较为敏感的红边波段,油菜作物的制图精度有较大提高,从91.30%提高到95.65%。

表2 不同波段下原始图像与融合图像的指标比较Table 2 Evaluation of fusion image index
2.4 红边波段组合下油菜识别精度对比及特征波段重要性分析
表4 为基于2 m 空间分辨率的Sentinel-2 多光谱数据不同波段组合下油菜作物随机森林分类的提取精度,可以看出,可见光B2、B3、B4-红边B5-近红外B8 组成的C2 组合相比于C1(可见光B2、B3、B4-近红外B8)组合用户精度提高2.91%,总体精度提高4.75%;由可见光B2、B3、B4-红边B5、B6-近红外B8 组成的C3 组合相比于C2 组合用户精度提高3.14%,总体精度提高1.21%,表明B5 波段比B6 波段对于提高总体精度更有效。C4(可见光B2、B3、B4-红边B5、B6、B7-近红外波段B8)组合相比于C3 组合制图精度提高4.35%,用户精度提高0.57%,总体精度保持不变,表明B7 对于油菜作物制图精度提升效果较为明显。C5(B2-B3-B4-B5-B6-B7-B8-B8A)相比于C4 组合制图和用户精度保持不变,总体精度提高2.41%,Kappa 系数提高0.028。表明B8A 波段对提升总体精度也有一定作用。

图4 不同分辨率影像地物类型灰度曲线Fig.4 Gray curves of land cover images of different resolutions

图5 典型地物的光谱曲线Fig.5 Spectral curve of typical objects on land
基于随机森林分类的特征波段归一化重要性度量值及排序如图7,可以看出在较高分辨率条件下,重要性排序最高的为可见光蓝色波段B2,重要性度量值为0.94;其次,在红边波段中,B7 和B5 对油菜信息识别精度提升作用相对较为突出,分别为0.89和0.75。与上述不同波段组合比较中B7 与B5 波段有助于精度提升的结果较为一致。而对于一般绿色地物响应相对较强的近红外B8 波段作用相对较弱,重要性度量值最小0.64。可见,红边波段相对于近红外波段更有助于提高目标作物制图精度和总体精度,不同红边波段对提升油菜作物识别精度不同。

图6 不同分辨率影像分类提取效果Fig.6 Crop classification as affected by images of different resolutions

表3 不同分辨率下分类精度比较Table 3 Classification accuracy with images of different resolutions
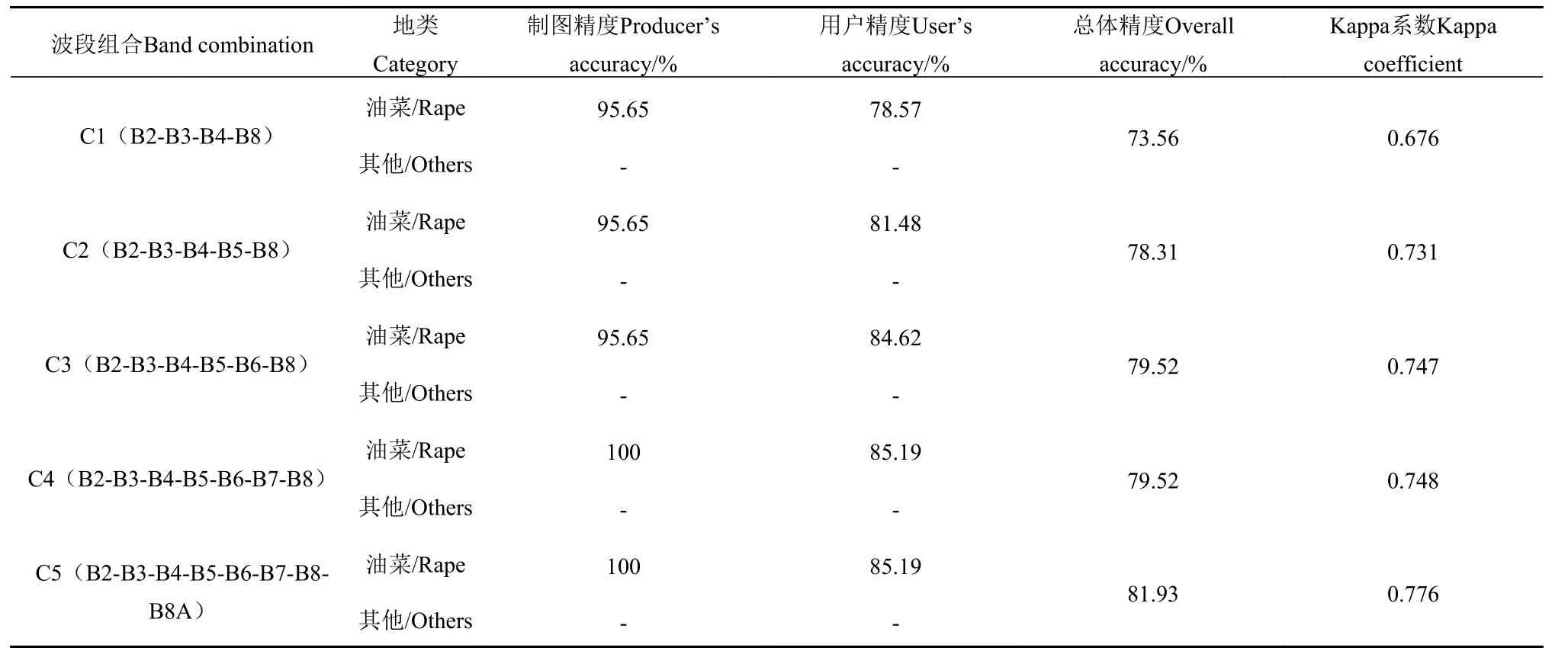
表4 不同波段组合下分类精度比较Table 4 Classification accuracy under different band combinations
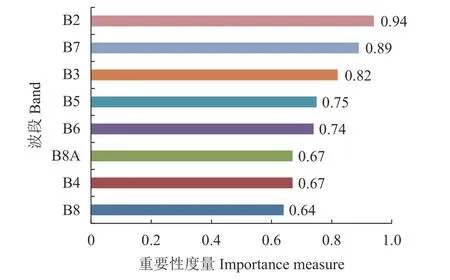
图7 基于随机森林的归一化特征波段重要性度量Fig.7 Importance measurement of normalized characteristic bands based on random forest model
3 讨论与结论
(1)本试验区内田块多成条带式分布,作物种植结构复杂,规模化种植程度低,较为分散,中等分辨率下目标作物目视解译尚且困难,提取精度估算难以令人信服。张焕雪[20]提出当提取作物较为破碎时,需要在提高影像空间分辨率的同时融入其他技术手段。本研究首次将影像重建和融合技术应用于Sentinel-2 影像,以获取2 m 的高空间分辨率Sentinel-2 数据。融合后目标作物目视可识别性明显增强,作物制图精度由86.96%提升到95.65%,总体精度从72.29%上升到79.52%。
(2)本文图像融合后,同等2 m 分辨率条件下,融合影像与原始GF-1 号多光谱影像的制图精度有较大提高,制图精度由91.30%提升到95.65%。融合影像不同波段组合结果表明,融入红边波段能够增加了地物之间的可分性,提高作物的识别精度,与此前刘佳[21]的结论较为一致。同时,本文进一步通过对B5、B6、B7、B8A 等多个红边波段对目标作物制图精度或者总体精度提升程度进行分析,得到不同红边波段对地物识别精度的具体提升效果,可知B5 波段对于油菜作物制图精度影响效果不明显,但对于整体精度提升影响较大,总体精度提高5%左右;B7 波段对于油菜作物制图精度提升效果较为明显,由95.65%提高到100%,而对总体精度影响不明显。
(3)本研究通过多光谱影像重建与融合技术实现了Sentinel-2 影像空间分辨率的大幅度提升,同时基于随机森林分类完成不同红边波段组合下的油菜提取结果的精度对比和特征波段重要性量化度量,较为全面地探索了Sentinel-2 影像高分辨率条件下不同红边波段下油菜作物遥感识别能力,可为Sentinel-2 影像分辨率提升研究及探索其更广泛的应用领域提供借鉴。但本研究设计的农作物提取结果只区分了目标作物油菜和其他两类。在今后的研究中,将考虑对更多的其他作物进行分析,探索不同红边波段对不同作物的敏感性,以进一步测试红边波段对油菜与其他作物波段响应的差异性。
