绕组分段永磁直线同步电机预设性能滑模反推控制
2020-11-24李大盼
李大盼
(江南大学 物联网工程学院,无锡 214122)
0 引 言
近年来,直线电机在传送系统中得到了广泛的应用。相比于传统的旋转电机,直线电机没有将旋转运动转换成直线运动的中间装置[1],比如丝杆和齿轮,减少了机械损耗,并且拥有传统直线运动系统难以比拟的高精度,同时还有高效率、低噪声和机构简单、功率密度大等诸多优点[2]。相比于直线感应电机,永磁同步直线电机(以下简称PMLSM)效率更高、功率密度更大[3],因此在高品质直线运动系统中得到广泛应用。根据PMLSM本体结构,可以分为长初级PMLSM和长次级PMLSM,长次级永磁同步直线电机一般用履带链供电,供电电缆需要跟随动子运动,这无疑会限制电机最大速度,降低电机加减速性能,并且对系统的可靠性产生不利影响[4]。绕组分段永磁直线同步电机(以下简称WS-PMLSM)由于其初级绕组分段的特点,解决了传统长初级绕组由于初级绕组过长引起的供电电压高、电阻及电感过大、电磁损耗大等问题[5]。从原理上讲,WS-PMLSM将较长的PMLSM的初级分成若干段段的小直线电机,在驱动电机时,只需对与次级耦合的小电机进行驱动,克服了长初级PMLSM电阻、电感较大的缺点,可以降低驱动系统压力,并且电机运行效率也可以得到提升。但定子绕组运行时参数是时变、不确定的,例如温度变化对电阻的影响,三相不平衡,轨道结构等[6],特别是次级滑块同时与两段定子绕组耦合的过度阶段,由于WS-PMLSM特殊的定子绕组分段结构,定子绕组的磁通、电感都随次级滑块位置变化,不考虑定子铁心饱和的情况下,动子从一段定子移除的过程中,电感的大小与耦合面积成正关系,变化率约为25%,磁链与耦合面积近似成正比[1],所以,在WS-PMLSM的控制系统设计中,应该着重考虑电机模型参数变化对控制系统的影响,针对这种情况,传统的PI控制难以取得良好的控制效果。
反推控制已经在PMLSM控制中得到了广泛的应用,该方法可以对PMLSM完全解耦,另一方面,根据反推控制设计的控制系统具有全局稳定性[7],但传统反推控制需要被控对象精准的模型信息,并且无法适应参数随时间的变化。为了提升传统反推控制的鲁棒性,自适应[8-9]、滑模[10-11]等方法被引入到反推控制中,用于处理被控对象参数不确定性和系统的非线性,并取得了较好的控制效果。文献[5]提出了自适应反推方法,通过设计自适应率来估计控制对象参数变化,用于消除参数不确定性对控制系统带来的影响。但它没有考虑微分环节所带来的微分膨胀问题,所设计的控制器计算量过大,限制了其实际应用;另外,该方法无法确保系统稳定的快速性。
本文将预设性能引入自适应反推控制,并引入受限指令滤波,解决输入受限和微分膨胀问题。预设性能考虑超调量和调节时间等瞬态性能,能够保证跟踪误差在一定时间内收敛到预设区域内。本文设计的控制器优点在于:1) 中间控制变量没有微分环节,消除微分膨胀;2) 运用预设性能方法,在保证系统稳定的基础上考虑系统的瞬态性能,使收敛速度更快,引入滑模变结构方法,增强了鲁棒性;3) 受限指令滤波限制了虚拟控制信号的幅值和变化速率,满足系统对状态变量和控制信号的约束,增强了实用性。最后,通过仿真实验证明所设计控制器的有效性。
1 WS-PMLSM的数学模型
次级滑块运动到初级线圈的过程中,次级滑块磁场对初级绕组磁场产生影响。随着耦合面积的增加,初级线圈的磁路磁阻、自感和互感和励磁电动势的幅值呈现上升趋势。当次级滑块完全运动到初级绕组上方(磁路完全耦合),初级线圈的磁路磁阻、自感和互感和励磁电动势的幅值保持稳定,不再发生变化。而在次级滑块退出初级绕组的过程中,随着耦合面积的减小,初级线圈的磁路磁阻、自感和互感和励磁电动势的幅值呈现下降趋势[13-14]。
WS-PMLSM每段小电机从本身物理特性来讲是一个PMLSM,其数学模型也与PMLSM相同,但由于WS-PMLSM特殊的绕组分段结构,在动子从一段绕组过渡到另一段绕组的过程中,动子对绕组模型产生影响,电机磁链和电感随动子位置变化而变化,由于电机的电感和磁链为动子位置的函数,将其分别用Ls(x)和ψf(x)表示,如图1所示。

图1 WS-PMLSM结构图
WS-PMLSM单段初级绕组在d,q轴同步旋转坐标系下电压方程:
(1)
式中:ud,uq是d,q坐标系下的定子电压;id,iq是d,q坐标系下的定子电流;Rs为相电阻;τ为极距;v为动子速度。
第n段初级绕组产生的电磁推力:
(2)

初级绕组整体产生的电磁推力:
(3)
次级滑块同时与两个初级绕组耦合的过渡阶段,两段绕组同时对次级滑块产生电磁推力,对两绕组施加大小相等、相位相同的电流,两段初级绕组可以等效为一个初级绕组,保证在过渡阶段电磁推力不发生变化。
WS-PMLSM的动力学模型:
(4)
式中:TL是负载力;M是运动部分的总质量;B是摩擦系数。
2 预设性能滑模反推控制器设计
WS-PMLSM模型具有非线性特征,并且模型参数不确定,传统的PI控制不能很好地适应这种情况,为了获得精确的速度控制,本文设计了预设性能自适应反推控制器。
2.1 限幅值指令滤波
反推控制需要对虚拟控制量进行逐级求导,会出现微分膨胀问题[12],同时考虑到实际应用中执行器饱和的问题。本文用限幅指令滤波替代微分环节,解决了微分膨胀和控制器饱和问题。其状态空间模型的方程:
(5)

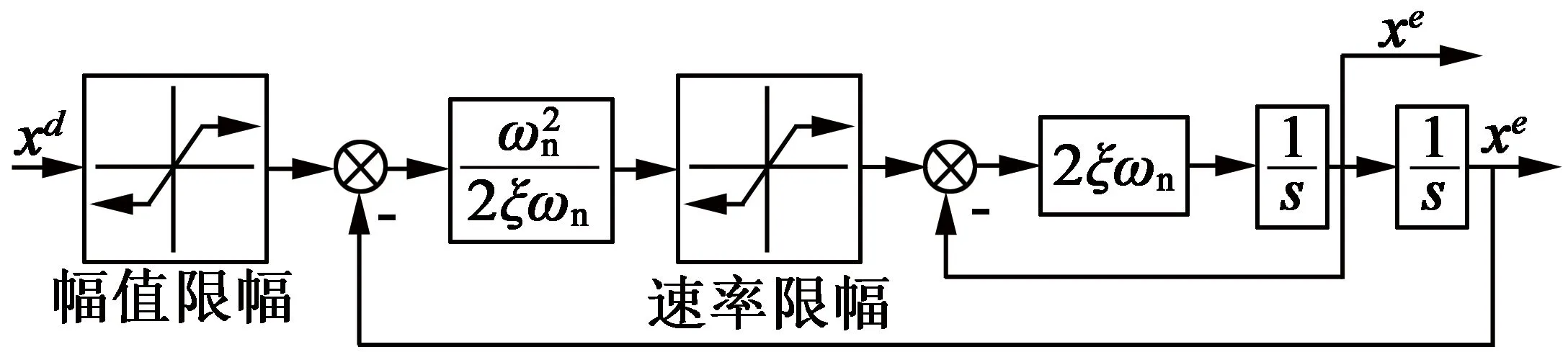
图2 限幅值指令滤波结构
本文以WS-PMLSM速度作为跟踪目标,q轴电流作为虚拟控制量,定义追踪误差:
e1=v(t)-vc(t)
ed=id
(6)

从图2可以看出,其可以不通过微分求导环节得到输入信号的微分,但滤波器不可避免地产生误差,该误差可能会对控制效果带来不利影响。为了消除这种影响,对跟踪误差进行补偿:
(7)
式中:η为指令滤波误差。
设计指令滤波补偿信号:
(8)

2.2 预设性能函数与误差变换
为了获得预先设定的控制性能,提出预设性能函数,系统速度的跟踪误差被限制在预设性能函数内。预设性能函数的定义如下:

本文选择预设性能函数:
ρ(t)=(ρ0-ρ)e-lt+ρ
(9)
式中:ρ0,ρ和l均正数。
(10)


为了将约束条件转化为等式形式,在动态性能函数中引入转换函数,将式(10)转化:
(11)
式中:ε(t)为转换误差;L(·)为光滑且严格递增的函数,另外,L(·)应满足一下性质:
(12)
(13)
定义一个满足上述条件的函数:
(14)
将式(11),式(12)代入式(14)可得:
(15)
对ε(t)求导可得:
(16)
将式(7)代入式(16)可得:

(17)
2.3 预设性能自适应反推控制器设计
对系统进行如下限定:

限定2:输入受限和状态受限的幅度和速率已知。
Step 1:选择李雅普诺夫函数:
(18)
对V1求导可得:
(19)
选择:
(20)
由式(19)、式(20)可以得到:
(21)
式中:k1为大于零的设计参数。
Step 2:为了增强系统动态性能,q轴电流环引入滑模变结构方法。设计滑模面:
式中:a为正的常数;n>m>0。
设计滑模面的趋近律:
(22)
式中:k2,τ均为大于零的常数。


(23)
对V2求导可得:

(24)
选择:

(25)
(26)
式中:k3为大于零的常数。
将式(25)、式(26)代入式(24)可得:

(27)
做稳定性分析:

(28)


V2[e1(t),e2(t),e3(t)]
(29)

(30)
由于实际系统中误差e1,eq,ed是有界的,所以W(t)有界,根据Barbalat’s定理,W(t)是连续一致的,可以得到:

当t→时,e1,eq,ed收敛到零,系统稳定。
3 仿真研究
本文搭建了一个如图3所示的仿真系统,用于验证所设计方法的有效性。系统仿真实验中WS-PMLSM参数如表1所示,限幅值指令滤波器的各项参数如表2所示。

表1 WS-PMLSM参数

表2 限幅值指令滤波器参数

图3 系统控制框图
为了获得良好的控制效果,控制器参数设计:k=100,k1=k2=k3=8000;自适应参数设计:γ1=40000,γ2=60 000,γ3=7 500。预设性能函数设计:ρ(t)=(1-0.005)e-90t+0.005。
通过对比PI控制和预设性能滑模反推控制(以下简称PPSC)的控制效果,验证所设计控制器的有效性和抗干扰性。在PI控制中,为了使WS-PMLSM获得快速的动态性能和超调的静态性能,使用试凑法确定PI各环节的参数。仿真中,为了检验控制方法对外部干扰的鲁棒性,在t=0.3 s时刻加入突变量,将电机负载Tl由10 N突变至100 N。
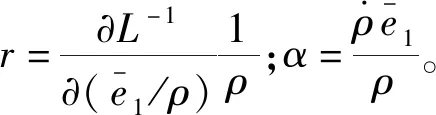
仿真结果如图4~图8所示。可以看出,电机刚起动时,误差较大,在控制系统的调控下,补偿误差迅速减小,并且最终收敛到零。在整个过程中,补偿误差没有超出预设性能区间,满足预先对控制系统设定的性能指标。图4为PPSC和传统PI控制电机速度对比。图6为两种控制方法误差对比,对比两种跟踪效果,PPSC超调量更小,当系统达到稳定时,PPSC没有静差。在系统受到外部干扰时,PPSC受到扰动影响,出现最大速度误差比PI控制最大速度误差小,并且能够快速修复外部扰动对控制系统的影响,使系统快速达到稳定状态,跟踪误差快速下降到零,这表明PPSC对外部扰动具有良好的鲁棒性,并且具有更好的动态性能。在电机实际运行过程中,外界对电机的扰动是不可预知的,例如电机负载质量变化,为了验证所设计方法对这类外部扰动的鲁棒性,将电机动子指令设为原来的3倍即3M。图7为正常动子质量和动子质量为3M时系统补偿误差对比。从图7中可以看出,当动子质量增加到原来的3倍时,系统起动后,补偿误差仍然迅速减小,并且最终收敛到零,在整个过程中,补偿误差没有超出预设性能区间,满足预先对控制系统设定的性能指标。图8为电机滑块质量为3M时,两种控制方法的速度对比图。可以看出,在电机参数发生变化时,PPSC能够很好地跟踪速度指令,超调量较小,并且速度误差可以收敛到零。当系统受到外部扰动时,PPSC对外部扰动具有良好的鲁棒性,能够迅速达到新的稳定状态,使跟踪误差收敛到零。因此,当WS-PMLSM无法获得或者无法精确获得时,本文设计的PPSC也能够获得良好的跟踪效果,具有重要的应用价值。
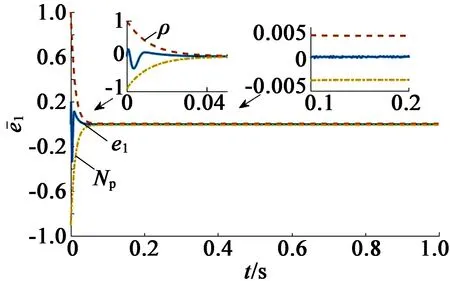
图4 补偿误差

图5 速度对比
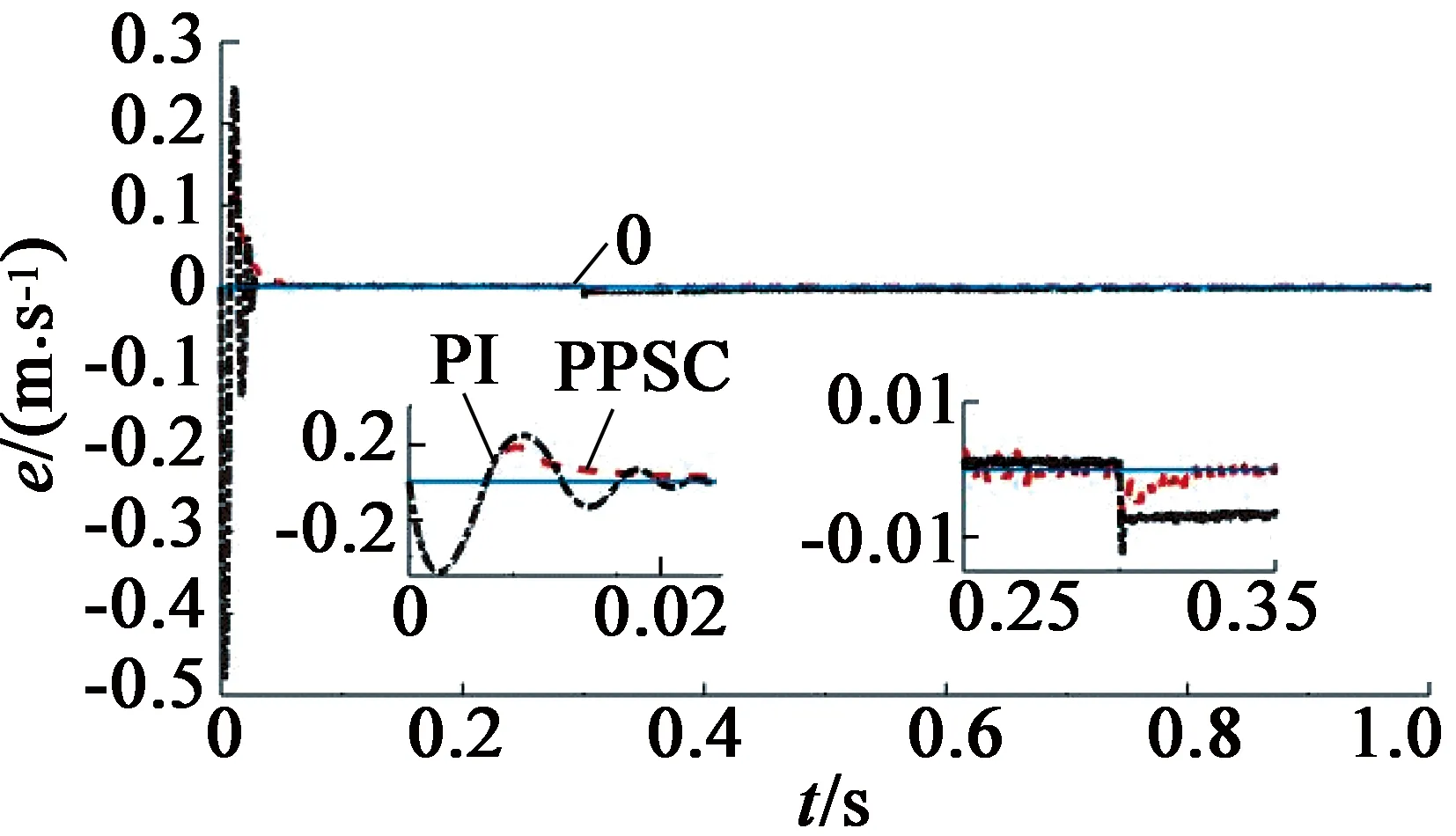
图6 误差对比
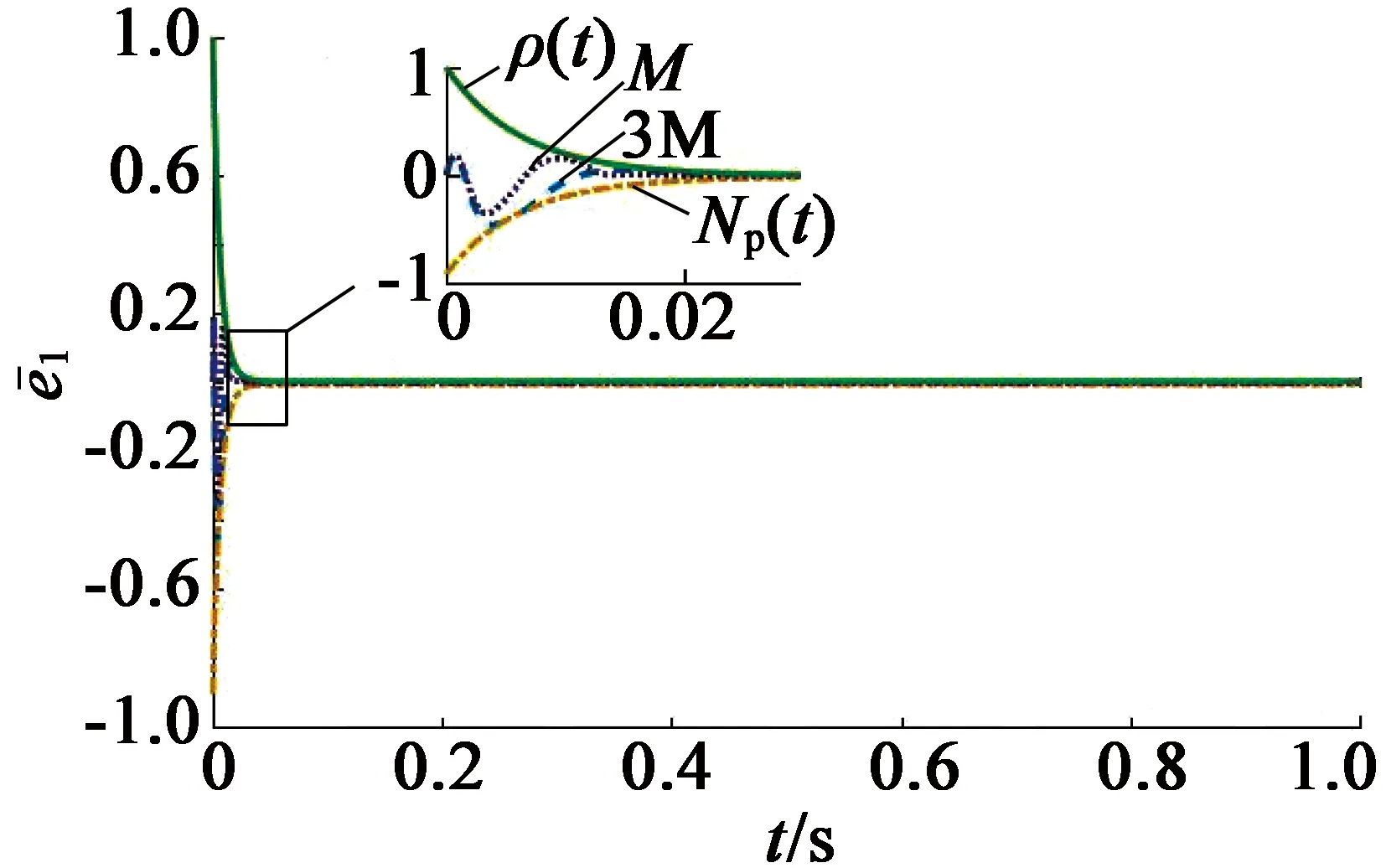
图7 3M补偿误差

图8 3M速度对比
4 结 语
本文设计一种基于预设性能的指令滤波滑模变结构反推控制器(PPSC),用于处理WS-PMLSM参数不确定性和系统非线性问题。基于李雅普诺夫稳定性理论设计了反推控制器,为了解决反推控制器中的微分膨胀问题,设计了指令滤波器代替微分环节。引入指令滤波器不可避免地产生指令滤波误差,为了避免该误差对控制效果带来不利影响,对指令滤波器的误差进行了处理。为了增强系统的鲁棒性,引入了滑模变结构方法,并且引入了预设性能方法以优化系统的动态和静态性能。最后通过仿真实验,针对WS-PMLSM控制,验证了所设计的PPSC控制器具比传统PI控制器有更好的跟踪性能,其动态性能和静态性能都优与传统的PI控制器,并且具有较好的鲁棒性,验证了所设计控制器的有效性和优越性。
