电缆配电环网故障定位方法研究
2020-11-17毛禹龙
毛禹龙
(遵义余庆供电局,贵州遵义 564400)
0 引言
配电网设备众多、故障成因复杂,在实际故障抢修中由于不能对故障准确定位致使停电时间延长,增加用户投诉率[1]。尤其是近几年敏感电子设备逐渐增多,若出现短时停电,可能会导致设备运行异常,造成设备损坏、数据丢失等严重事故。根据数据资料显示,配电网故障占据停电因素的80%,因此,要想提升供电可靠性,其配电网是主要因素[2]。传统配电网主要采用开环运行模式,操作方便,配置简单,缺陷在于出现故障时需要进行停电转供[3]。如果采取闭环运行,则能够对非故障区域采取隔离措施,但缺陷在于环网内短路电流双向流动,原有保护控制方式将不能适应。由此,针对于配电网闭环运行模式下的保护控制方法进行研究。
1 配电环网故障定位方法
如图1 所示,配电支路通过环网柜(Ring Main Unit,RMU),也就是环网柜与配电线路环网相互连接,环网柜中装有智能终端(Smart Terminal Unit,STU),同时智能终端支持点对点通信与分布式智能控制功能。
1.1 故障分析
如图1 所示,若故障发生在f1-f4处,规定环路正方向从M侧母线指向N 侧母线。在此之中,正序电压故障分量采用U1表示,正序电流故障分量为I1-i,M与I1-i,N表示,电流的参考方向以母线流向线路为正方向,正序电流故障分量相位差为ΔφiM-iN。一旦出现电路异常故障后,STUi采取正序电流故障分量相位,同时和附近的智能终端交换数据,获取正序故障分量的电流相位差,以及从STUi两边经过的ΔφiM-iN与ΔφiN-(i+1)M。
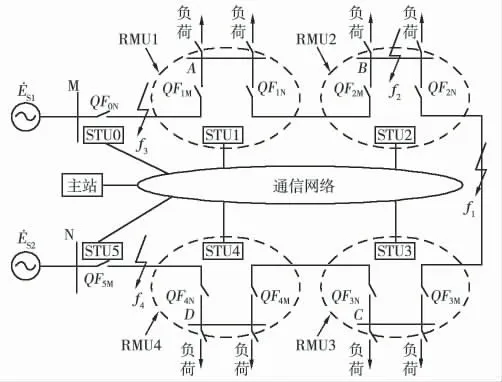
图1 电缆配电环网结构和保护配置
在现实运行过程中,短路时系统及线路阻抗容易对ΔφiM-iN产生影响。相位比较的闭锁角应该根据90°整定,故障点所处的线路两段相位差应在-90°<Δφ<90°,其他相近断路器相位差应在90°<Δφ<270°,按照相位差值特征则能够确定故障区间。
1.2 统一的故障处理规则
统一的故障处理规则主要目的是方便配电自动化(Distribution Automation,DA)系统更好地实现故障定位及隔离[4]。假若环路中有k 个RMU,终端STU0 和STU(k+1)为特殊RMU。当STUi相连路和内部母线并未出现异常时,设定STUi状态则为Y0;当RMUi上游线路出现故障时,设定RMUi状态为Y1;当RMUi下游线路出现故障时,设定RMUi状态为Y2;当STUi内部母线出现故障时,则将RMUi状态设为Y3。
为了让故障得到有效隔离,需要对发送信号规则进行设定,如处于Y0状态将在保持时间到达后自动返回;若为Y1状态将向QFiM发送跳闸信号;若为Y2状态则将向QFiN发送跳闸信号;若为Y3状态则向QFiM和QFiN发送跳闸信号。
1.3 智能终端启动方法
可靠因数为Krel,低压母线最大三相负载的有功功率为Pmax,低压母线额定电压为UN,低压负荷功率因数为cosφ,环网柜降压变压器变比为KT,将电流突变量作为智能终端的启动元件,其定值公式如下:

1.4 故障定位与保护动作逻辑
当处于闭环运行状态时,智能终端则可以接收上下游信号,另外,通过快速计算来决定是否需要采取行动。当处于开环运行状态时,系统则表现为辐射状线路,例如当上游段线路出现故障时,其下游全部智能终端马上处于停电状态,相邻智能终端则不能接受相关数据信息。处于故障点上游同时和不相邻RMU 正常接收相应信息,处于Y0状态;如果故障点发生在线路,上游相近RMUi的M、N 处断路器均存在电流,此时状态应该为Y2,如果不能对下游RMU 信息进行接受,则不能判断其具体状态,此时应该设置φ(i+1)M=φiN;如果故障出现在RMUi内部母线,N 侧断路器无电流,此时状态应该为Y1,不过由于缺失下游环网柜信息,不能给予状态评判,应该设置φ(i+1)M=φiN-180°。
2 仿真模型分析
2.1 仿真模型参数
为了对本文所提出的故障定位与隔离方法进行检验,采取PSCAD(Power Systems Computer Aided Design,电力系统计算机辅助设计)软件进行电磁建模仿真分析[5]。将电源电压数值设为ES1=ES2=10.5 kV(∠10°),电源内阻抗参数数值为ZS1=ZS2=0.4+j0.4 Ω,电缆线路长度设为li-i+1=0.8 km,ltotal=4 km,单位阻抗设为z1=0.3+j0.08 Ω/km,环网柜所带负荷数值为S=2 MV·A,cosφ=0.85。设置RMU 出线单台最大功率为0.3 MW,得出STU启动电流为0.117 kA。
2.2 闭环运行动作特性
假定T 为4 s,结果表明,f3出现三相短路故障,流过各断路器的电流突变量均超过4.5 kA,全部STU 均能够启动;相位差1在-90°~90°,STU0 则为Y2状态,根据设定好的规则STU1 跳开QF1M,其他环网柜状态为Y0,因此,并不会出现相关信号。由此可见,在闭环运行状态的前提下,此方法能够实现准确故障定位及隔离。
2.3 开环运行动作特性
假定断路器QF3M为开位,T 为4s,f3出现三相短路故障,结果表明,故障后唯有STU0 具有电流突变量且处于Y2状态,终端启动发送跳闸信号。由此可见,在开环运行下,其故障定位及保护方式是适用的。
3 结论
传统配电网普遍采用“闭环设计、开环运行”模式,保护控制方式简单,负荷转供过程中会导致短时停电。本文基于供电可靠性为前提,提出了一种新的配电环网短路故障定位隔离方法,当出现短路故障时,智能终端将根据接收信号自动对时实现同步,相邻RMU 根据统一的相位差来进行故障点定位,从而按照设定状态采取隔离措施。通过模拟仿真结果表明,该方式可以同时适用于配电网闭环运行和开环运行,可行性较强。
