中日护理机器人专利技术景观分析*
2020-11-13吴菲菲李一苇
吴菲菲 李一苇 苗 红
(北京工业大学经济与管理学院,北京100124)
护理机器人目前尚未有统一的定义,但是可类比服务机器人进行定义。根据深圳稻草人自动化有限公司对于服务机器人的定义,服务机器人是通过完全自主或半自主运作,为人类健康或设备良好状态提供有帮助的服务,但是不包括工业性操作。护理机器人的定位包含于服务机器人,但是相对服务机器人中更集中于用户的健康需要;相对于手术机器人更集中于日常生活应用。尽管根据深圳稻草人自动化有限公司的叙述将护理机器人的定位于医用机器人[1],但区别于手术机器人、诊断机器人与康复机器人。但是根据Goeldner等人[2]对于各国护理机器人研发状态的研究综述,护理机器人的功能范围结合了医用机器人中诊断机器人、康复机器人以及家用机器人、娱乐机器人、保安机器人与清洁机器人等,与维持用户身心健康状态及日常行动能力相关的领域均可纳入护理机器人的服务范围。护理机器人对应机器人产业链中的系统集成部分,而护理机器人的研发过程覆盖零配件与制造部分。
根据当前社会状况,护理机器人的优先服务对象是老年人,尤其是受限于身体与心智状况的老年人。根据中国统计年鉴公布的2018年末人口数据,65岁以上人口接近1.67亿人,占全国总人口的 11.94%,超过 10%,老年抚养比为16.8%,而且指标都在持续增长,说明中国人口老龄化程度在不断加重。处于劳动年龄的人口的抚养压力将持续增加,养老经济压力加重,护理人员的缺口不断增加,传统的人类抚养形式将难以应对养老需求。而护理机器人不仅能作为护理人员的补充,并且集成了多学科的技术创新成果,是面向老龄化社会的重要技术领域,甚至可能形成新兴产业。因此未来护理机器人技术与管理的联系将不断加深。根据2019世界机器人大会上公布的《中国机器人产业发展报告2019》,中国机器人市场规模预计达到86.8亿美元,2014年至2019年的平均增长率约为20.9%,高于同期全球平均水平。显示中国机器人产业正在快速发展。但是主要发展领域是工业机器人,护理机器人产业仍待未来发展。日本相对中国更早进入老龄社会,更早开始进行护理机器人的研发,在护理机器人领域技术具有领先性。通过对中日两国护理机器人技术景观的对比,一方面能够对标先进,分析我们的问题,另一方面能发现差异,形成自身优势与特色。
国外对护理机器人技术的研究领域,除去护理机器人具体功能设计、实验与测试,集中于特定技术领域的发展状况,比如护理机器人研发活动发展趋势、不同层级研发主体分布以及研发主体的合作状况[2];环境辅助生活机器人的代表性产品的相关实验状况以及该类机器人需要增加关注的研究领域[3];面对老年人的八种重点需求的九类机器人的研发状况[4];社会保障机器人对老年痴呆症患者做出的贡献,使用的风险以及未来发展方向[5]。各类研究使用的数据以文献与专利为主,通过文献与专利计量,网络分析法以及对关键文献进行阅读总结进行研究。
国内护理机器人技术研究方面,主要在于构建护理机器人的研究体系,总结护理机器人的应用状况及未来发展,比如饮食护理机器人的不同分类方式以及该技术在国内外的发展状况[6];机器人在物品传送、患者转运、康复护理、饮食护理、老年人陪伴中的应用与研发状况,以及机器人在护理领域面临的挑战[7];建立体系化的健康机器人技术研发创新平台,以及健康机器人技术基于体系化创新平台的创新方向[8];社会辅助型机器人功能、效果与机理,面临的挑战与未来展望[9];通过构建中国养老服务机器人的市场需求模型预测市场规模,以此总结中国养老服务机器人发展现状并预见未来重点产业发展方向[10]。各类研究主要通过对文献的阅读总结以及指标模型的构建进行研究。
综合国内外相关研究可知,当前护理机器人研究仍处于技术研发阶段,产业化前景光明。尽管已有针对多国护理机器人技术的比较分析,但以技术先进国家为对标对象,专门分析我国与之的差异尚未有研究成果,从专利技术景观的视角,有助于发现中日在护理机器人技术领域的专利分布区别,研发路径差异,为我国在该领域的研发确定方向,把握研发资源的配置。
基于专利的技术发展研究常采用专利地图[11]与专利技术路线图[12],分析的目的有识别技术机会[13]、监测技术发展[14]、发现技术空白[15]、给出特定的技术发展路线[16]、新兴技术未来发展分析[17,18]、描述竞争态势[19]等。专利技术景观分析也是以专利数据为依据的分析方法,以特定技术、产品或领域为对象,涉及多维分析,通过时间、地理与技术领域的组合分析数据,形成对象多维度特征,是制定科学技术政策与商业战略的有效工具[20]。专利技术景观分析已应用于物联网技术发展[21]、核能技术发展[22]、癌症治疗领域技术与未来发展[23]、玉米生物育种技术全球发展[24]、老年福祉技术研发现状与竞争格局[25]等。Aharonson[26]等在2016年提出了一种新的技术景观构建方式,通过构建更细粒度的专利分类空间标记技术研发主体拥有的专利,以向量形式展现专利分布,基于向量衡量技术间距离,识别离群专利,描述不同企业间技术轨迹特征,以及如技术融合、知识外溢以及技术景观变化等微观层面的动态特征。这种专利标记方式不仅提升对专利技术信息反映的准确性,而且能更直观地反映出技术动态发展特征。
Aharonson[26]等提出的技术景观框架利用专利自身的分类号,细化了专利分类的粒度,增加专利分类号对信息的反映准确度;相对专利共被引方法,降低了因为研究主体的决策考量对准确度的影响,并且突破了本专利只能引用本专利之前授权公开的专利的时间范围限制以及对专利分类结构反映不足等问题;相对专利文本分析方法,减少了对研究者专业知识的需求导致的研究领域范围有限的问题。因此本文借鉴Aharonson[26]等提出的技术景观框架,用于构建中日护理机器人技术景观。通过向量形式的专利分布,从横向与纵向两方面呈现中日两国机器人技术特征的差异,不仅显示各自的技术发展现状,并且显示两国不同层级技术研发主体的技术距离与动态发展特征。最后以传感器作为护理机器人关键技术对中日两国护理机器人专利进行对比分析,研究中国护理机器人技术的发展方向。
1 研究框架与方法
专利技术景观分析分为专利数量变化趋势、专利质量特征与专利结构特征三部分,从专利数量、质量与技术特征三方面进行技术景观构建。其中专利结构特征分析在Aharonson等[26]所提出的技术景观框架基础上,针对可获得数据特点提出具体用于本文计算分析的指标及计算方法。研究框架见图1。
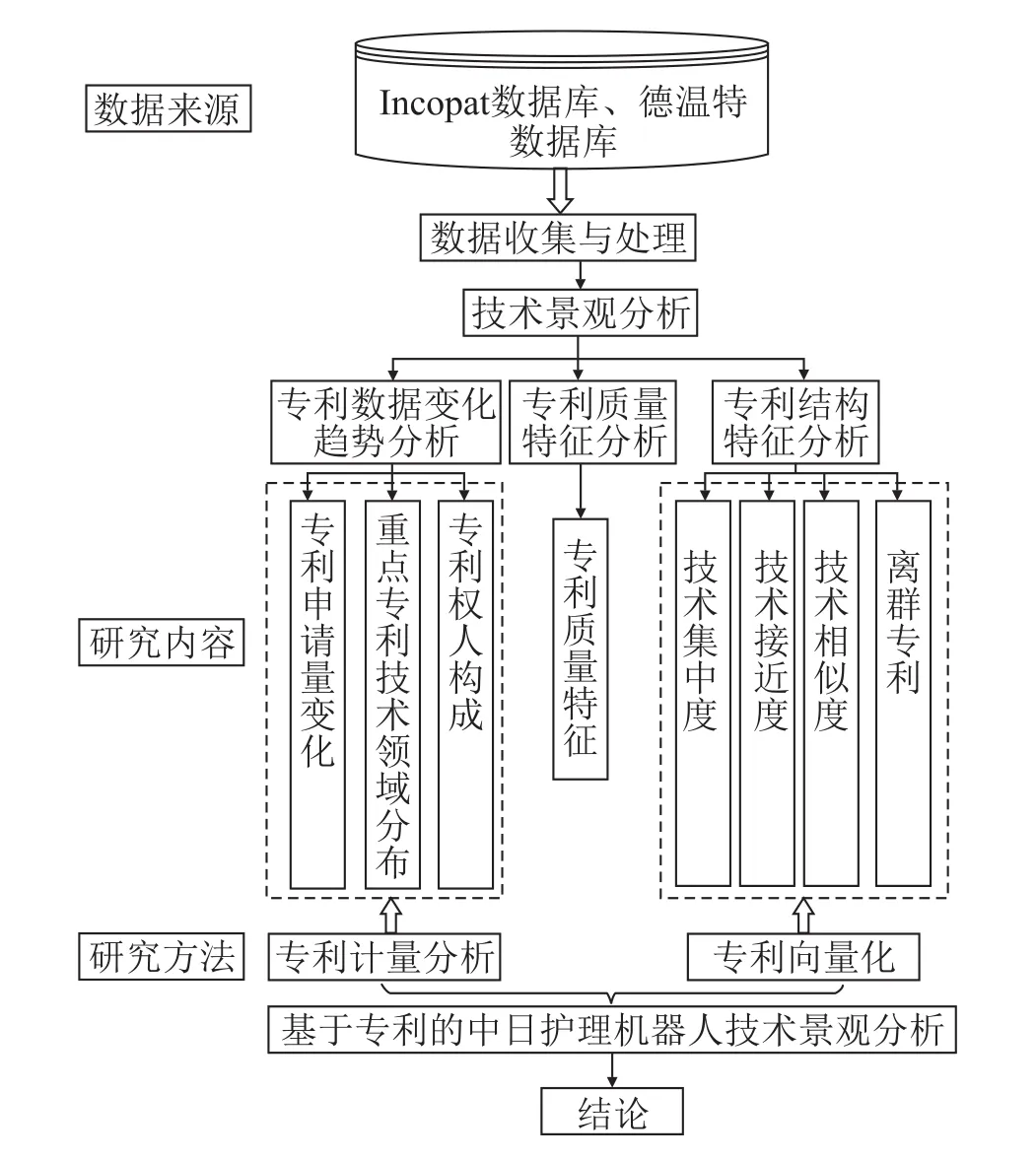
图1 研究框架图Fig.1 Research Framework
1.1 专利数量变化趋势分析
专利数量变化趋势旨在从专利申请量、专利分类与专利权人构成三方面对比中日两国在护理机器人领域的发展现状。
1.1.1 专利申请量变化趋势
由于专利的授权周期较长,且不同国家地区专利授权时间难以比较,但专利申请时间能够反映专利权人发明创造行为,因此以专利申请时间为标准进行专利申请量变化趋势对比。通过专利申请数量的变化,一定程度上能够判断该技术所处发展阶段。
1.1.2 重点专利技术领域分布分析
专利技术领域分布分析反映不同创新主体的技术关注点,可以用于判断未来可能形成的技术优势。此外,技术领域分析结果为未来研发提供了方向指引。因此,本文选取有效专利信息分析更具有指导性。专利涉及的领域众多,表达方式也不尽相同,而专利国际分类号具有较高的普适性,为此选用专利国际分类号作为技术领域的表达。若使用小类级别专利国际分类号,由于粒度较粗,对技术领域的划分缺少可辨识度,为了更准确地比较存在的技术领域的差异,选择大组级别专利国际分类号定义技术领域。
1.1.3 专利权人构成分析
专利权人是专利技术的实际掌控者,不同的专利权人数量占比反映着技术的成熟状态。通常企业型的专利权人,其技术的成熟度相对较高,因为企业申请专利的目标比较明确,与市场的关联较密切,而高校的专利申请则更偏重于技术研究成果的展示,从我国不断强调提高校科技成果要产业化的政策激励,也能反映出高校专利成果与市场存在距离的问题。
1.2 专利质量特征分析
专利质量特征可通过专利质量评价指标综合评价了解。专利质量评价指标按照专利内容相关不同方面可分为体现专利影响力、专利蕴含知识量及专利市场价值的基于被引的专利质量评价指标;体现专利和最新科技发展的关系的基于引用的专利质量评价指标;体现专利保护程度的基于技术保护范围的专利质量评价指标;体现专利保护范围的基于区域保护范围的专利质量评价指标;体现专利受重视程度的基于有效维持的专利质量评价指标等[27]。根据检索数据特点,针对以上专利质量相关方面分别选用平均被引次数、被引率作为专利被引相关指标;选用对应专利参考文献中科技资料比例的科学关联度[27,28]作为专利引用相关指标;选用平均权利要求数量与平均专利宽度作为专利技术保护范围相关指标;选用平均专利族大小、平均专利保护区域大小、三方(美国专利商标局、欧洲专利局与日本专利局)专利数量、PCT申请数量作为专利区域保护范围相关指标;选用专利授权率、专利有效率及专利平均寿命作为专利有效维持相关指标,全方面对中日两国护理机器人专利质量进行对比。指标体系见表1。
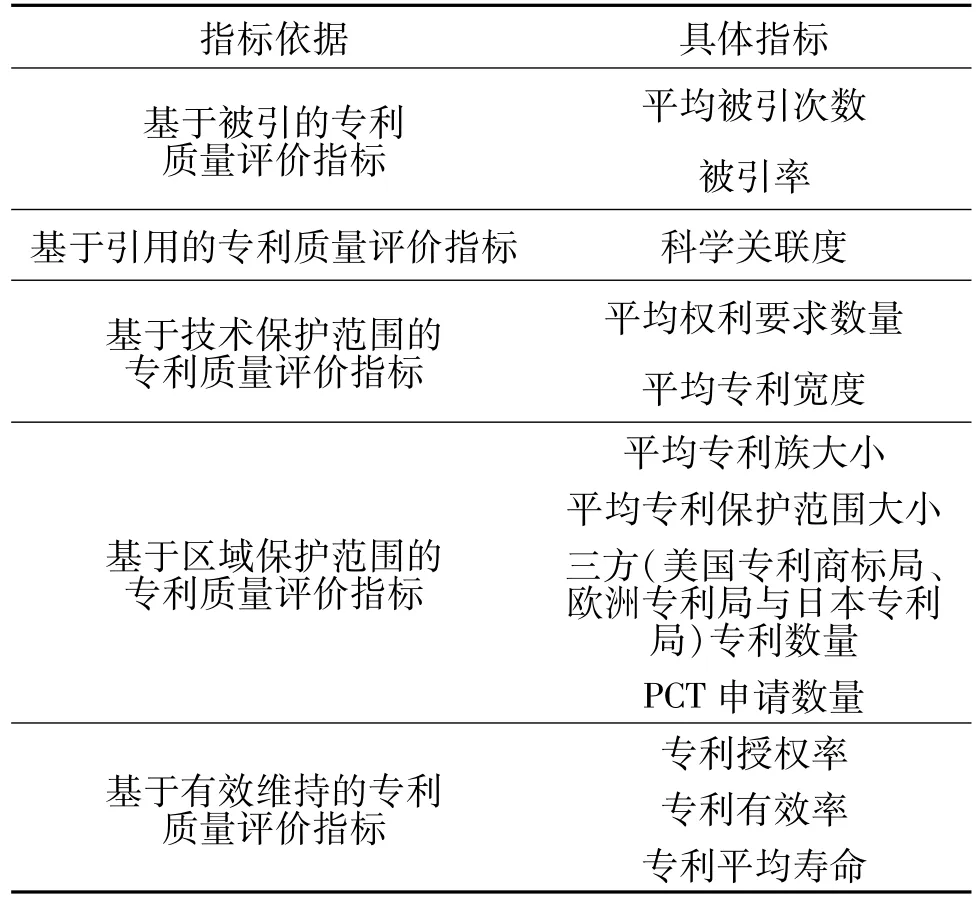
表1 专利质量评价指标体系Tab.1 Patent Quality Evaluation Indicators
1.3 专利结构特征分析
专利结构特征分析关注技术内部的联系,从中日两国各自技术研发主体出发进行对比。专利结构特征指标包括技术集中度、技术接近度、技术相似度与离群专利,所有的指标都是在专利转换为向量形式后计算得到的。专利向量化处理是本文专利技术景观分析的第一步。通过比较专利结构特征,能够了解不同技术主体在不同技术领域的布局重点,把握其未来可能的发展方向。
1.3.1 专利向量化
专利向量化指通过全部专利分类号形成技术空间,每一位置对应一处理论上可行的技术,与专利数据进行匹配后形成技术向量,通过技术向量中的元素分布反映技术领域的分布。Aharonson等[26]基于全部主线子分类级别的美国专利分类号形成技术空间,通过C++编写程序将专利数据与技术空间进行匹配,以1或0标记匹配或不匹配的专利,形成技术向量。但是由于具体操作步骤没有阐述,因此难以直接套用。本文同样为追求更细粒度的专利分类号所反映的更深入技术信息,提出基于全部大组级别的IPC专利分类号形成技术空间的方法,可得到7192个分类号,形成7192个技术空间位置。通过R语言编写程序将专利数据与技术空间进行匹配,匹配方式与Aharonson等[26]相同。
1.3.2 技术集中度
技术集中度是对应技术向量深度方面的特征,即通过专利在各个技术位置上的分布数量占比反映技术研发主体的研发深度,技术集中度越高,相应的技术领域研发深度越深,反映技术研发主体更加集中于有限的技术领域研发。反之则相对平均布局。此部分算法与 Aharonson等[26]相同,使用Herfindahl Hirschman指数计算空间位置上的专利分布,即技术研发主体占据的各个向量空间位置上专利百分比平方和。计算结果越高,说明该技术主体越聚集于单一技术领域的研发。公式见式(1)。
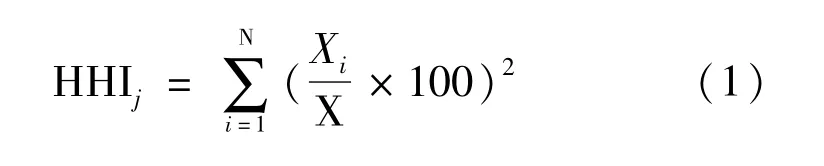
其中,N对应第j个技术研发主体占据的空间位置总量,X对应第j个技术研发主体拥有的护理机器人专利总量,Xi对应第j个技术研发主体在第i个空间位置拥有的护理机器人专利量。
1.3.3 技术接近度
技术接近度对应技术向量广度方面的特征,关注不同技术研发主体的技术向量之间的距离,包含重叠位置及其占比技术研发主体总量与平均技术位置距离,反映技术研发主体之间的差距。该项指标可用于待评估的技术研发主体与目标技术研发主体的技术比较,如果重叠位置越多,平均技术位置距离越近,说明研发主体间技术越相近;如果重叠位置有限,平均技术位置距离较远,则说明研发主体间存在共同技术领域,但技术相差较大,专利布局方向不同。如此可判断待评估的技术研发主体与目标主体技术的相似性,从而进行投资、合作、竞争等行动决策。另外,重叠位置相对技术研发主体占据的技术位置的占比能够反映技术的重叠为技术研发主体带来的竞争强度,重叠位置占比越高,竞争强度越高。平均距离的计算方面,Aharonson[26]等没有具体说明选用的距离算法,无法直接使用,本文选用通常采用的m维空间内两点之间的真实距离的计算公式——欧式距离算法计算技术向量主体平均技术位置距离,公式见式(2)。

其中,m对应技术研发主体序号,N对应IPC分类号总量。
1.3.4 技术相似度
技术相似度同样对应技术向量广度方面的特征,关注不同技术研发主体的技术向量的相似度,反映技术研发主体专利布局之间的相似度。该项指标搭配技术接近度,同样可用于待评估的技术

其中,m对应技术研发主体个数,x1与xm分别对应技术研发主体1与技术研发主体m的技术向量,Cov()对应协方差,sd()对应标准差。
1.3.5 离群专利
离群专利关注技术向量内部元素分布方面的特征,与技术集中度相配合。技术集中度关注当前技术研发主体集中研发的技术领域,而离群专利指近期授权,但是与已存在专利内容相关性较低,因此没有被纳入当前主体技术领域[29],维持独立状态的专利。尽管目前离群专利与主体技术领域的专利关联性较低,但是在技术研发主体的探索下,有可能建立离群专利与其他专利的关联关系,形成新型技术。所以对于离群专利的搜索能够一定性地反映探索技术可能的发展方向。Aharonson[26]等基于自选的距离算法识别离群专利,但具体算法不详,无法直接使用。本文首先基于技术集中度选取技术空间中的专利密集分布点,基于专利共现关系形成聚类,选取聚类以外独立且数量较高的专利点或专利组作为离群专利。研发主体与目标技术研发主体的技术比较。如果一项专利反映了该技术研发主体一定量的技术能力,那么多项专利组合形成的技术向量相似度越高,说明研发主体间专利布局越相似,技术能力越相似。如此可判断待评估的技术研发主体与目标主体的未来发展方向,预测双方合并或竞争的可能性。Aharonson[26]等没有具体说明选用的相似性算法,无法直接使用,本文选用皮尔逊相关性系数计算向量的相似度,以此反映技术相似度。公式见式(3)。
2 实证分析
2.1 数据来源
本文以INCOPAT数据库作为数据来源,基于Goeldner[2]等的检索式结构并参考专家意见迭代修改,最终以(TI&AB=(robot*AND(health OR care OR personal OR partner OR humanoid OR service OR companion OR“human robot interaction”ORmedical OR support OR assistant))NOT(industrial OR surgicalOR automotive OR car OR chariot OR anesthesia OR construction OR DNA OR“minimally invasive”OR endoscopy OR cancer OR surgery OR stroke OR(young OR juvenile OR adolescen*OR infant OR teenage*OR youth OR child*OR bab*)OR(explosive OR“explosive handling”)OR(“welding control”OR welding OR abrasive)OR space OR farm OR(patrol OR inspect*)OR agricultur*ORmanufactur*OR assembl*ORmilitary OR“production line”OR(underwater OR sea OR marine)OR“steering gear”OR wharf OR“road cleaning”OR horticultur*OR compet*OR train*OR fight*OR“versus fighting”OR lathe OR workshop OR mount*OR lathe OR(underwater OR sea OR marine)OR(animal*OR pet*)ORmaterial*OR“pole climbing”OR logistic*OR editorial*OR toy*)AND IPC分类号=(B25JOR B62D OR G06FOR A61BOR G05D OR G05B OR A61H OR A47LOR H04L)NOT(G10N OR B24B OR F16L OR G06Q OR B65G))作为中国护理机器人专利检索式;以(TI&AB=(robot*AND(health OR care OR personal OR partner OR humanoid OR service OR companion OR“human robot interaction”OR medical OR support OR assistant))NOT(industrial OR surgical OR automotive OR anesthesia OR construction OR DNA OR“minimally invasive”OR endoscopy OR cancer OR surgery OR stroke OR(young OR juvenile OR adolescen*OR infant OR teenage*OR youth OR child*OR bab*)OR martial art OR(“welding control”OR welding OR abrasive)OR work*OR inspect*OR assembl*ORmount*OR lathe OR(underwater OR sea OR marine)OR manufactur*OR(animal*OR pet*)ORmaterial*OR peel*OR spray*OR logistic*OR editorial*OR toy*)AND IPC分类号=(H04N OR H04M OR G06T OR F16H OR G16L OR B62D OR A61H OR A61G OR G06QOR G05B OR G05D OR A63H OR G06FOR A61BOR B25J)NOT(B23P OR B65G OR H01L))作为日本护理机器人专利检索式。检索时间为2019年5月16日,检索年份不限。分别去除噪声,缺失项数据后,中国护理机器人专利总共5257项,日本护理机器人专利1198项。
2.2 护理机器人技术景观分析
2.2.1 专利数量变化趋势分析
1)专利申请量变化趋势分析
专利申请增长趋势如图2所示。首先,日本护理机器人专利申请的起始年份早于中国,第一项专利是1977年的机器人防碰撞控制方法专利,中国护理机器人的第一项专利是1988年的多轴机器人装置。此外,日本的专利申请持续时间超过中国,每年申请量变化相对稳定,整体呈现稳定增长趋势。相对而言,中国直到1999年才开始每年持续申请护理机器人专利。到2007年中国护理机器人专利申请量增长率明显提升并超过日本,2013年专利累计申请量超过日本,并且直到2018年持续高速增长,显示中国对于护理机器人的研发投入显著增加。根据专利申请量增长率来看,中国2000年之后的护理机器人专利申请趋势增长水平基本持平日本1990年之前的增长水平。根据美国N.Abernathy与James M.Utterback(1976)所提出的技术生命周期理论的A-U模型可推测,日本的护理机器人专利研发进入转型阶段,产品中出现平衡技术、市场及其他制度因素的主导设计,创新以过程创新为主。而中国处于易变阶段,竞争中的创新主体需要试制各种外型与功能的产品,探寻用户的真正需求。
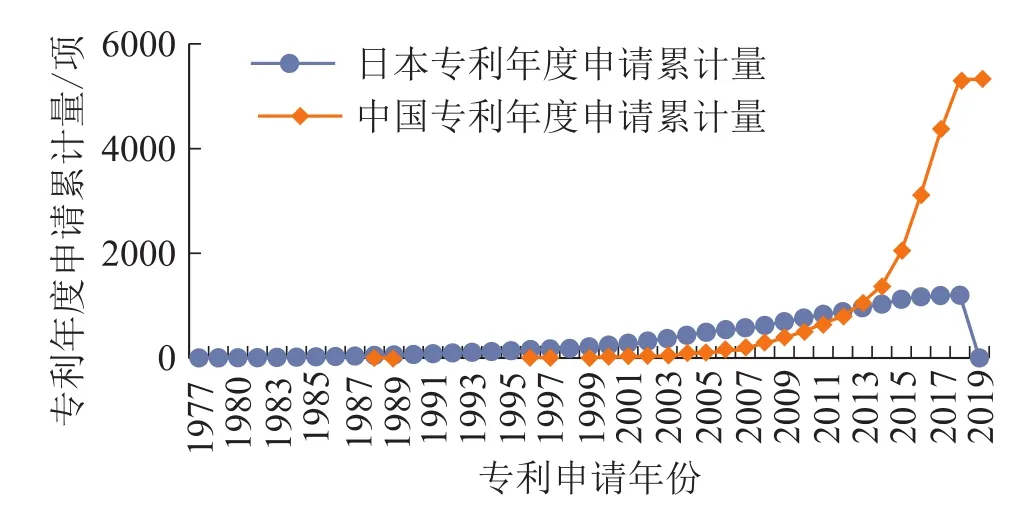
图2 中日两国年度专利申请累计量增长趋势Fig.2 Development Trend of Cumulative Annual Patent Applications in China and Japan
2)重点专利技术领域分布分析
中国专利领域分布见表2,日本专利领域分布见表3。中国研发投入集中于B25J11/00;日本研发投入集中于B25J5/00。两国均大量投入研发的专利种类有 B25J19/00、B25J11/00、B25J13/00、G05D1/02。根据占比,两国投入程度相似的是 B25J19/00与 G05D1/02,其中在 B25J19/00领域中日两国在 B25J19/02,B25J19/04,B25J19/06的数量分布基本相同,对应机器人的基本功能模块,位置识别功能模块。但是在B25J11/00领域与B25J13/00领域,两国的分布却截然相反。中国大量投入研发的领域是B25J11/00,其中有效专利对应具有明确用途的机器人或系统、机器人躯体结构;日本大量投入研发的领域有B25J13/02,B25J13/06,B25J13/08,其中涉及的研发领域主要有机器人控制装置与方法、机器人定位识别与响应系统。对比之下,日本护理机器人专利偏重机器人产业链中机器人零部件与系统集成部分,而中国主要设计产业链中的机器人本体。日本的专利研发布局注重影响机器人性能的关键部件;而中国的专利布局偏向具有完整的功能机器人。

表2 中国护理机器人前十位专利IPC类别分布Tab.2 Top 10 IPC Categories of Patents of Care Robotics in China

表3日本护理机器人前十位专利IPC类别分布Tab.3 Top 10 IPC Categories of Patents of Care Robotics in Japan
3)专利权人构成分析
专利权人分布见表4。其中中国专利权人以高校为主,而日本专利权人以企业为主。中国方面有效专利数量排名前十位的专利权人除去与华南理工大学合作申请专利的广州绿松生物科技有限公司以外,只有上海未来伙伴机器人有限公司一家企业;而日本方面专利权人主要为企业,且具有传统产品技术优势,如汽车企业与电子企业,反映出这些企业的技术和产品的结构转型。
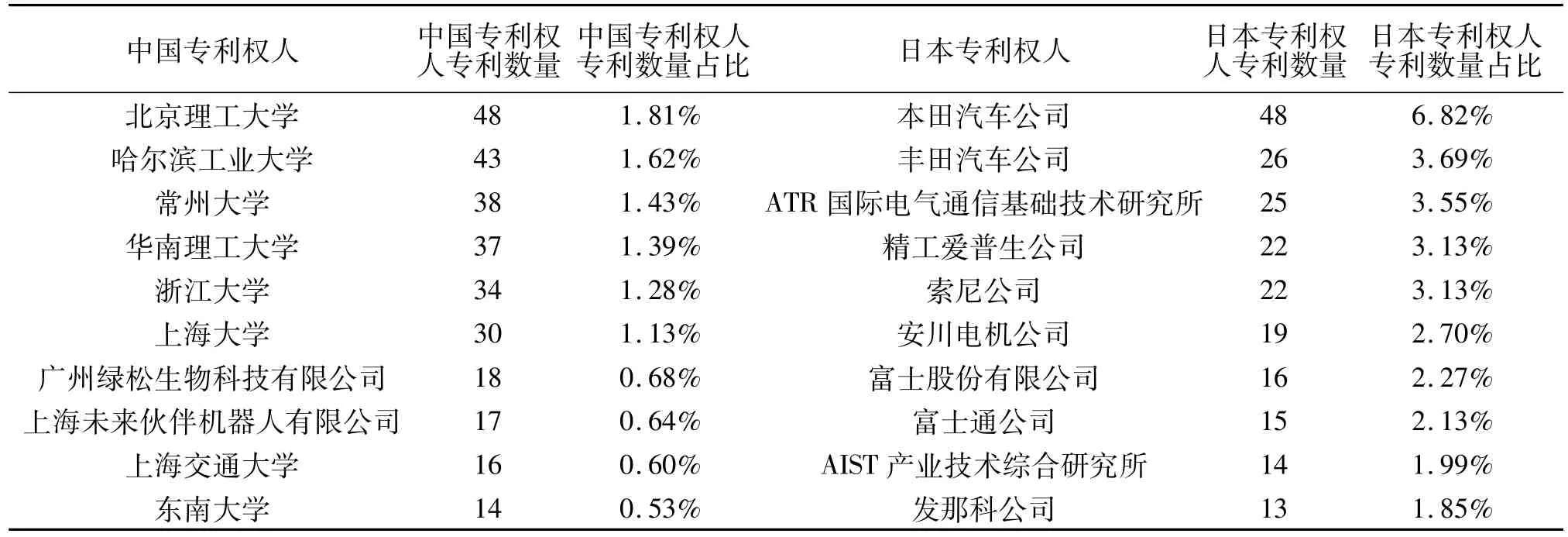
表4 中日护理机器人有效专利数量前十位专利权人Tab.4 Top 10 patentees of Care Robotics in China and Japan
2.2.2 专利质量特征分析
根据表1的指标进行计算,结果如表5。
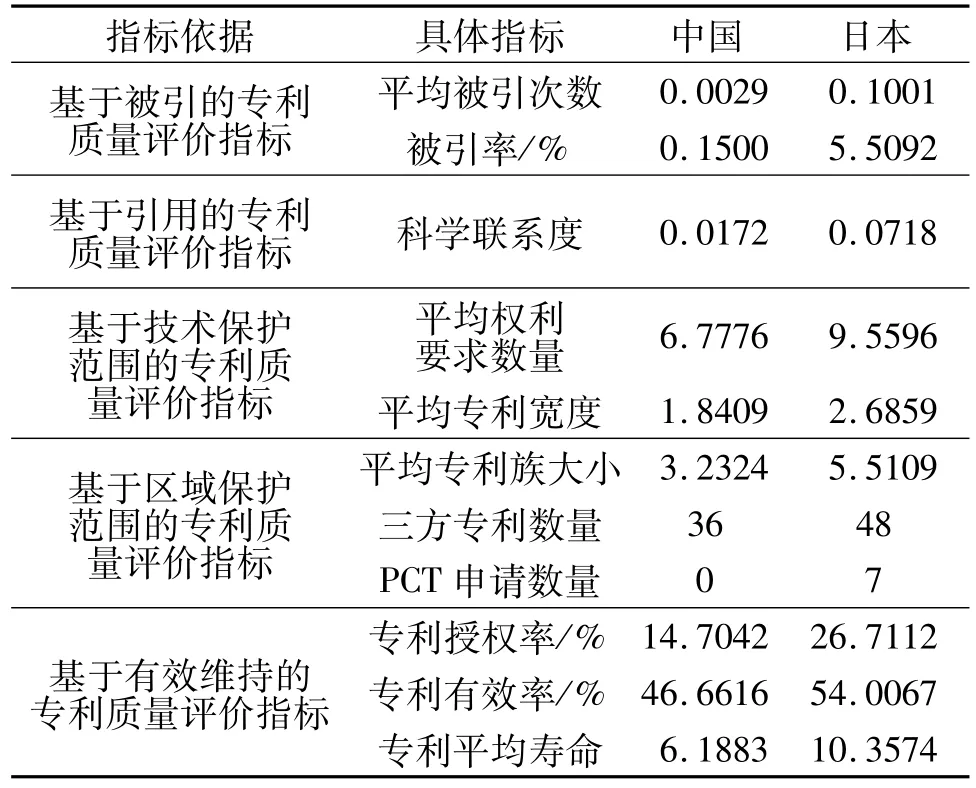
表5 中日护理机器人专利质量对比Tab.5 Quality of Patents of Care Robotics in China and Japan
计算结果显示中国护理机器人专利质量整体弱于日本护理机器人专利。专利被引方面由于中国被引用的专利数量与总被引次数已经落后日本,导致平均被引次数及被引率都明显落后,显示中国专利的影响力较弱。专利引用的科学联系度方面,尽管中国专利对期刊文献、会议文献与专著等科技相关资料的总体引用量超过日本,但是引用科技资料的中国专利数量相对中国专利总量较少,因此中国护理机器人专利整体与最新科技发展的整体联系程度较弱。专利保护范围方面,尽管日本由于地域优势在三方专利数量上占优,但是在平均专利族大小方面与PCT申请数量方面日本的领先显示其对专利的保护程度强于中国,保护范围大于中国,因此国际市场的参与程度强于中国。在专利有效维持方面,尽管中国由于专利发展起步较晚导致专利平均寿命方面存在劣势,但是专利有效率方面的落后显示中国专利带来的预期收益弱于维护成本,导致专利权人对专利的维持重视度不高。而相对中国快速增长且远超日本的专利申请量,专利授权率的落后显示中国护理机器人的专利质量有待加强。
选取被引量较高的有效发明授权专利对标题与摘要进行内容分析,发现包含机器人的具体运动机构设计与构造内容的专利受到高度关注,比如医疗机器人机械手取放医疗工具与夹取物体的动作、应对地面颠簸震动的移动装置,而单纯的控制系统与程序关注度弱于机器人的机体活动部分构造。说明当前研究关注的是护理机器人机体部件的具体运行方式以及与环境的直接互动,将护理机器人视为具有自主活动能力的机器人而非功能型仪器。这方面,中国尽管存在机器人移动装置的专利,但是并非针对护理机器人,且专利引用程度落后日本。
2.2.3 专利结构特征分析
为了突出比较重点,本文选择有效专利持有数量前十位的专利权人进行技术集中度、技术接近度、技术相似度的对比,其中技术接近度包括重叠度与距离。技术集中度根据式(1)计算,技术接近度根据式(2)计算,技术相似度根据式(3)计算,结果见表6~表11。离群专利部分则利用全部有效专利的专利分类号进行分析,结果见表12与表13。

表6 日本护理机器人专利权人技术集中度Tab.6 Technological Concentration of Patentees of Care Robotics in Japan
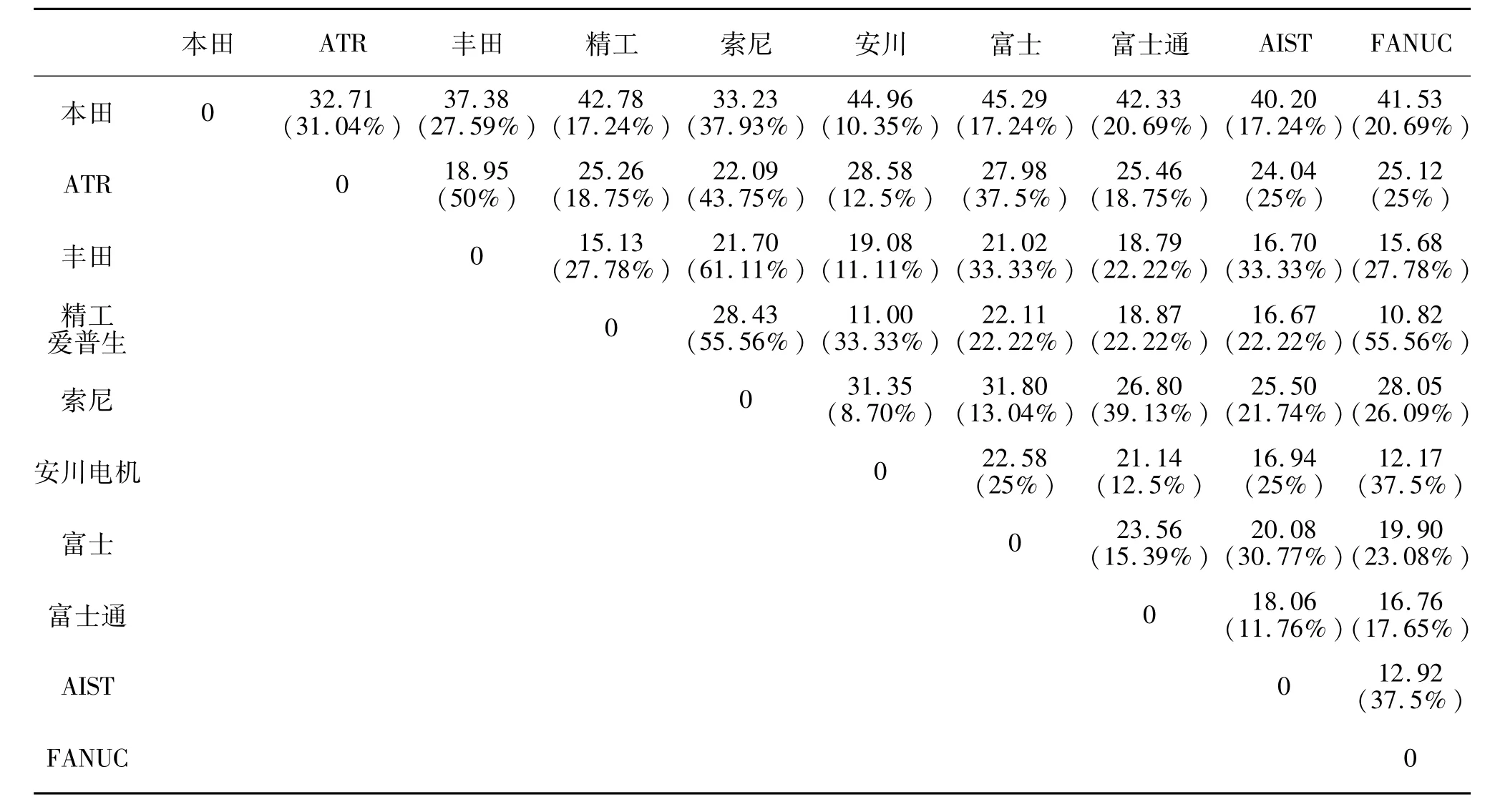
表7 日本护理机器人专利权人技术接近度1)Tab.7 Technological Proximity of Patentees of Care Robotics in Japan1)
1)技术集中度对比分析
根据表6、表9结果,可发现技术集中度的影响因素并不只是研发主体占据的空间位置的数量,并非研发主体占据的空间位置数量越少,技术集中度越高。需要综合考虑空间位置数量及各个位置上的专利数量。日本方面技术集中度较高的技术主体有精工爱普生公司、安川电机公司、富士股份有限公司、富士通公司;最低的技术主体是丰田汽车公司,其专利在不同的空间位置分布相对平均。中国方面技术集中度较高的技术主体有常州大学、上海大学、广州绿松生物科技有限公司;最低的技术主体是浙江大学。根据两国内部技术主体集中度最高的领域以及外国企业在本国的有效专利的集中分布的领域可总结出两国各自重视的技术领域,日本护理机器人的研发集中于B25J5/00(装在车轮上或车厢上的机械手)、B25J13/00(机械手的控制装置)、B25J19/00(与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置)等领域。而中国集中于B62D57/00(仅以具有除车轮或履带以外的其他推进装置或接地装置为特征的车辆,或者以车轮或履带加上具有除车轮或履带以外的其他推进装置为特征的车辆)、A61B5/00(用于诊断目的的测量)、B25J9/00(程序控制机械手)、B25J17/00(接头)等领域。根据两国各自技术研发主体的专利分类号对应的空间位置,日本护理机器人研发主体在A63H,B25J小类级别的专利分类领域集中投入研发,尤其在B25J小类区域覆盖了除B25J1/00以外技术位置。而中国的重点投入研发集中于B25J9/00,B25J17/00,B62D57/00多个大组级别领域,在小类级别领域相对分散。但日本整体覆盖的小类级别专利领域范围仍超过中国。根据专利分类内容,日本领先的技术研发主体集中于机械手及其附属装置,以及病人或残疾人的椅子或专用运输工具这两个领域,与老年健康护理机器人的生理与安全功能需求相关[30];中国的技术研发主体以特殊接地移动装置的车辆(如多足机器人等)、机器人对环境的识别功能、机械手及其夹取结构等领域的研发为主。
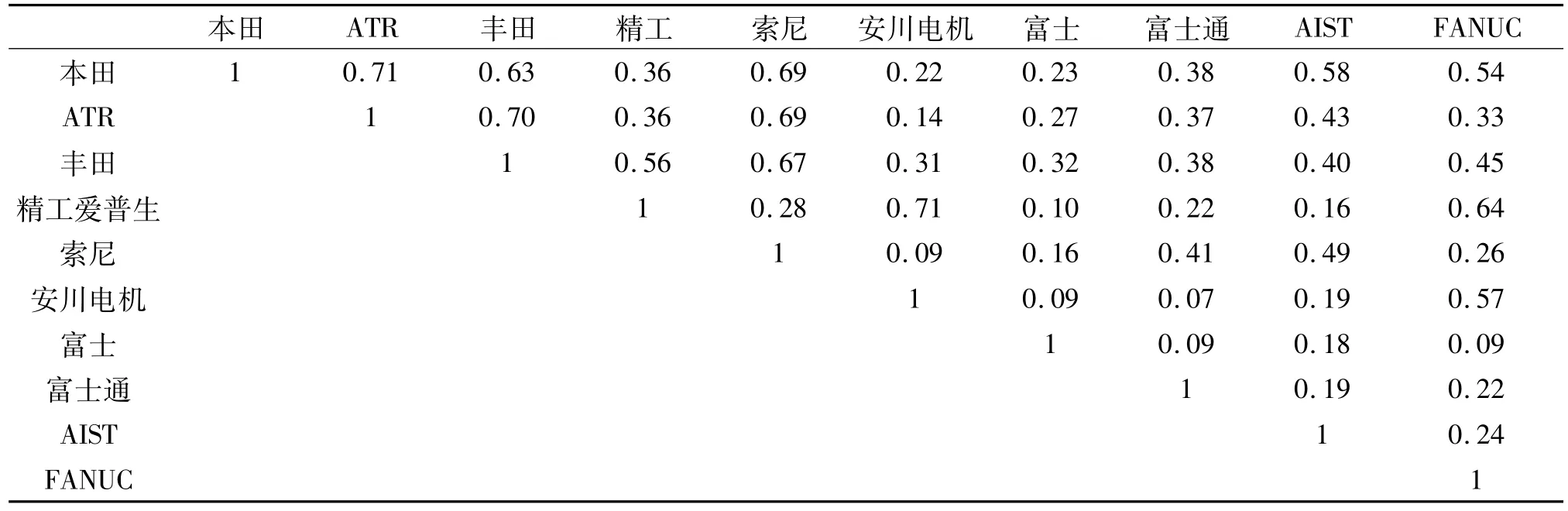
表8 日本护理机器人专利权人技术相似度Tab.8 Technological Similarity of Patentees of Care Robotics in Japan

表9 中国护理机器人专利权人技术集中度Tab.9 Technological Concentration of Patentees of Care Robotics in China
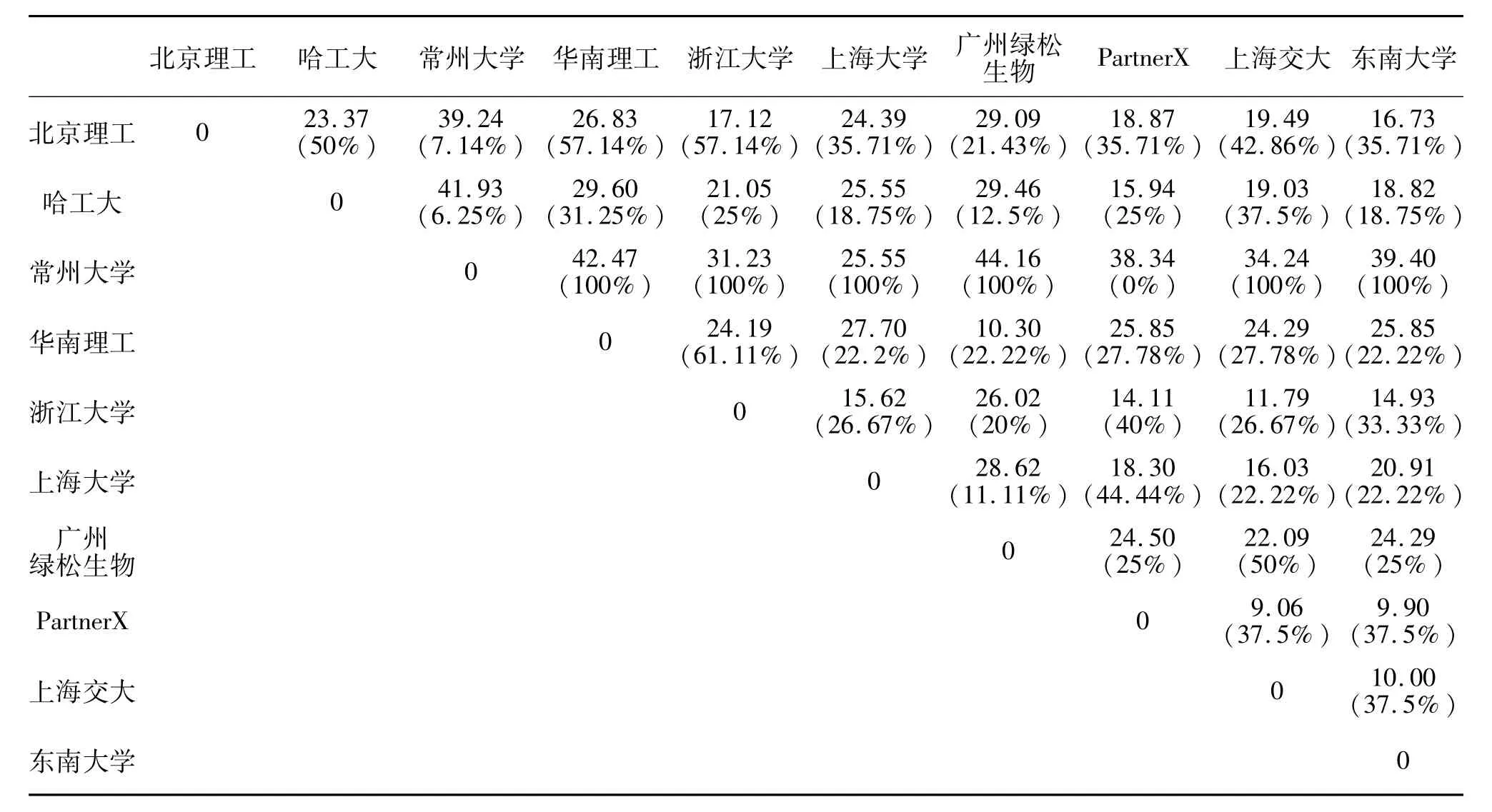
表10 中国护理机器人专利权人技术接近度1)Tab.10 Technological Proximity of R&D Institutions of Care Robotics in China1)
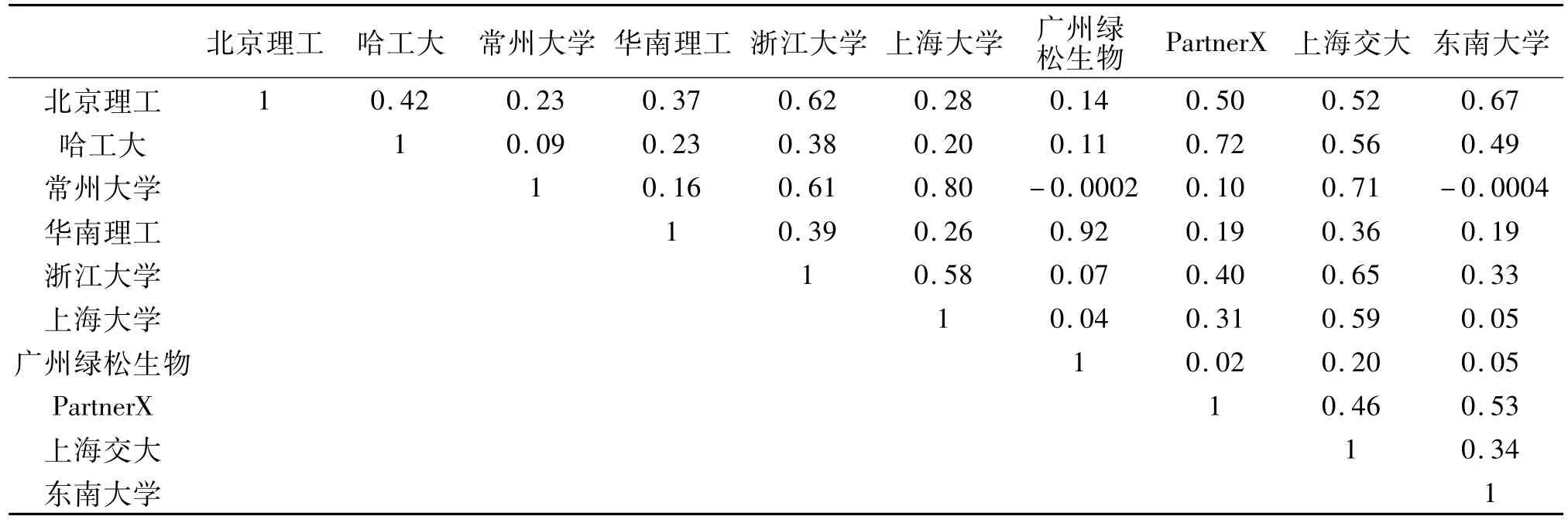
表11 中国护理机器人专利权人技术相似度Tab.11 Technological Similarity of Patentees of Care Robotics in China
2)技术接近度对比分析
技术接近度方面,根据表7、表10结果,高重合度意味着技术研究主体之间重合的技术领域占比自身整体技术领域较高,而技术距离则反映技术研究主体之间研发的区别程度,因此重合度越高,技术距离越近意味着技术主体之间竞争强度越高。总体上日本技术研究主体之间的距离大于中国技术研究总体,中国内部高校之间的距离比高校与企业及企业与企业之间的距离更近。国家内部方面,日本的ATR研究所与丰田汽车公司,丰田汽车公司与索尼公司,精工爱普生公司与索尼公司与发那科公司的技术距离较近,重合度较高。其中ATR研究所与丰田的竞争强度最高。中国方面,北京理工大学与哈尔滨工业大学、华南理工大学、浙江大学、上海交通大学,浙江大学与华南理工大学、上海未来伙伴机器人公司,上海大学与上海未来伙伴机器人公司,上海交通大学与广州绿松生物科技公司技术距离较近,重合度较高。其中北京理工大学与浙江大学的竞争强度最高。其余机构尽管有一定的重合领域或较高的重合度,但是由于技术向量平均距离较远,说明在重合领域之外技术主体有相互区别的研发领域,所以竞争强度相对较低。根据重叠位置对应的专利分类,日本领先的技术研发主体基本都投入了 B25J5/00、B25J9/00、B25J13/00、B25J19/00等领域。根据日本老年健康护理机器人的功能需求[30],可推测机械手是日本护理机器人的核心技术领域。中国方面,虽然技术主体间重合度弱于日本,但是大部分技术研发主体投入了 B25J9/00、B25J17/00、B62D57/00等 领 域。尽管中国在特定小类领域的覆盖程度弱于日本,但在B25J小类区域的投入同样集中,因此可推测机械手是护理机器人的重点研发领域。但是其余领域中国的技术主体研究分布较分散,并未形成小类级别集中投入的核心技术领域或者共性技术领域,只有在B62D57/00大组领域相对集中。因此机器人的特殊接地移动装置属于中国当前的共性技术领域。
3)技术相似度对比分析
技术相似度方面,根据技术相似度识别研究布局相似的研究主体,根据相似主体预见特定主体未来可能投入的研究领域。根据表8、表11结果,日本技术研究主体整体相似度高于中国技术研究主体。日本内部本田汽车公司与ATR研究所,ATR研究所与丰田汽车公司,丰田公司与索尼公司相似度最高,而这些主体均在A63H11/00、B25J5/00、B25J9/00、B25J13/00有大量投入。在此基础上可预见本田汽车公司在A63H3/00、F15B15/00领 域,ATR 研 究 所 在A61H3/00、B25J17/00、H04N5/00领域,丰田汽车公司在 A63H3/00、A63H11/00、B25J5/00、F15B15/00、G10L15/00领域,索尼公司在 A61H3/00、B25J19/00领域投入研发。中国方面哈尔滨工业大学与上海未来伙伴机器人公司,常州大学与上海大学及上海交通大学,华南理工大学与广州绿松生物科技公司相似度最高,分别在 B25J9/00、B62D57/00与A61B5/00领域共同重点投入,因此可预见上海未来伙伴机器人公司增加在B25J9/00与B25J17/00的投入,哈尔滨工业大学开始B25J19/00的投入,常州大学开始在B25J11/00领域投入,上海大学与上海交通大学在B62D57/00领域继续投入,广州绿松生物科技公司在B25J11/00、G05D1/00领域增加投入。结合上文技术集中度与接近度判断,日本的技术研发主体研发集中于B25J小类级别的技术领域,其余技术领域技术主体各自覆盖不同小类级别进行研发,可推测日本的研发布局属于以机械手领域为核心,向不同方向发展功能用途的形式;中国的技术主体研发布局同样在B25J小类领域相对集中,但是覆盖程度与集中程度弱于日本,不同主体间在相互距离较远的大组级别领域集中研发,尚未形成群体的核心领域,但是中国整体相似度高于日本,因此中国不同研究主体的研发布局相似度较高,由此可推测中国尚处于通过差异性产品竞争迎合需求的技术研发阶段。
4)离群专利对比分析
结果显示,日本方面未来可能发展的技术领域 有 A61B19/00、B25J3/00与 A63H11/00或A61B19/00、B25J3/00与 B25J5/00,主要涉及医疗或手术机器人;以及B62D55/00与 B60R25/00或 B62D55/00与 B62D57/00,主要涉及履带式机器人接地移动装置以及车辆防盗。中国方面未来可能发生的技术领域包括 G05B17/00与G05B13/00或G05B17/00与G05D1/00以及 G05B23/00与 B62D57/00或 G05B23/00与 G05B19/00或G05B23/00与G05D1/00,主要涉及机器人控制系统。

表12 日本离群专利Tab.12 Patent Outlier in Japan

表13 中国离群专利Tab.13 Patent Outlier in China
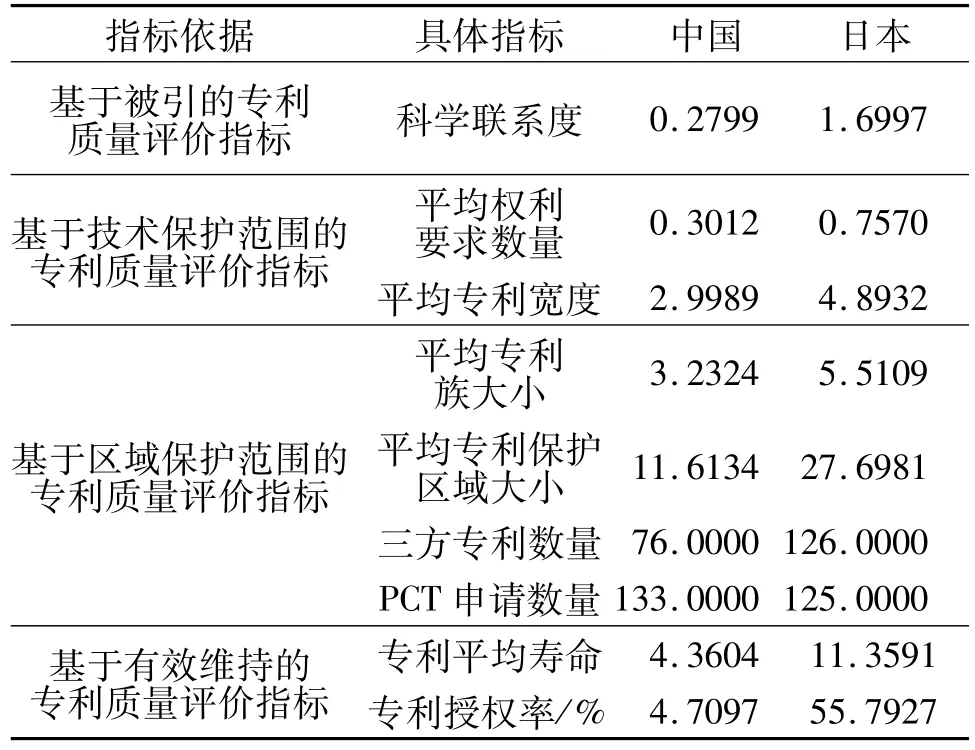
表14 中日护理机器人传感器技术专利质量对比Tab.14 Patent Quality of Sensor of Care Robotics in China and Japan
3 护理机器人关键技术专利质量对比分析
护理机器人虽然属于机器人中的一种,机器人的关键核心技术同样也影响着护理机器人的发展,鉴于针对机器人的专利技术研究已经有文献进行了分析[2,31],本文所分析的护理机器人作为一类特殊的机器人,其关键核心技术也有特殊性,根据文献[32]可知,传感器是护理机器人领域的关键,为此,本文利用DII数据库对该领域技术进行专利比较。结果见表14。
分析结果表明,尽管中国护理机器人传感器技术有效专利数量接近日本专利的三倍,但是专利授权率方面中国明显落后,说明其中大部分有效专利处于申请状态而非授权状态。专利平均寿命显示中国专利整体维持程度弱于日本。另外在三方专利数量与PCT申请数量中国护理机器人传感器技术相对上文中国护理机器人专利增长明显,但根据专利发明人与专利权人名称可推测其中大部分并非中国本土专利权人所持有专利,而是外国专利权人在包括中国在内的多个国家及地区所申请专利,缺少中国本土专利。而其余专利质量指标反映中国专利的技术保护程度与保护范围以及与最新科技发展的联系程度平均水平同样弱于日本专利。
4 结论与建议
本文对中日两国护理机器人的专利技术景观分析结果显示:
1)总体趋势方面,中国护理机器人技术处于快速发展阶段,日本进入稳定发展阶段。专利分类领域反映的技术研发布局中,中日两国在机械手配合的附属装置的读出装置、观察装置、安全装置;机械手及其控制装置;二维的位置或航道控制等技术领域投入程度相似。专利研究主体中,中国以高校为主,日本以机器人相关部件生产企业为主。相同专利数量下,中国单一研究主体的影响力弱于日本研究主体。专利质量对比体现中国专利的影响力、与最新科技的联系、受保护程度以及有效维持能力均弱于日本,尤其缺少对于机器人与环境互动机体构造相关专利的保护与研发
2)从技术集中度、技术接近度、技术相似度综合反映出的研发路径看,日本以机械手为核心技术领域,不同技术研究主体根据不同的功能用途发散研究;中国则是不同技术主体分别机器人接地移动装置,环境识别与机械手夹取结构等不同技术领域合作投入,研发领域相对分散,但是研发路径相似度较高。
3)根据离群专利对技术未来研发分析的判断,日本集中于医疗或手术机器人技术领域;中国集中于机器人控制系统。
根据中日专利技术景观对比,结合我国机器人产业园布局规划,中国工业与信息化部、国家发展改革委、财政部三部委联合印发的《机器人产业发展规划(2016—2020年)》,中国智能护理机器人将实现面向老人照护需求,具有智能感知识别、自主移动等能力,与用户进行交流,辅助老人进行家务劳动,提供多样性的护理服务。对中国护理机器人技术未来研发的建议如下:
1)机械手是护理机器人的核心功能领域,应当继续集中投入研发。同时扩展研究范围,覆盖机械手专利相关领域,形成中国自身的核心技术。
2)机器人的接地移动装置目前已是领先研究主体的共性研究领域,同样需要继续投入研发,作为中国护理机器人的关键部件之一。机器人内部控制系统与机器人接地移动装置以及位置姿态控制系统的结合是中国护理机器人未来可能发展的方向之一,应当重点关注。
3)目前护理机器人机体运动相关设计与构造相关的专利受到高度关注,且传感器是护理机器人感知技术的关键部件[32],而中国目前缺少相关本土专利权人所持有专利。因此研究应转向以传感器为中心的机体关节等部位零部件设计构造。因此需要工业生产型企业的参与,由相关工业生产企业或机器人产业园承担研发生产,促进企业参与护理机器人研发,同时促进企业之间的合作,掌握机器人关键部件的技术。
4)发挥中国以高校为主的研发模式优势,利用高校资源重点对护理机器人结构与功能进行研究。建立类似华南理工大学与广州绿松生物科技有限公司的高校与企业合作模式,增加高校与机器人产业园或生产企业的互动。
