导电橡胶电阻传感器对拉伸应变载荷的响应
2020-11-11夏志东王金淑
夏志东, 高 园, 高 沐, 王金淑
(北京工业大学材料科学与工程学院, 北京 100124)
传统应变传感器类电子器件大多基于金属或半导体材料[1-3],但存在应变量小、灵敏度不高等局限. 目前发展较为迅速的柔性应变传感器则克服了传统电子器件容易脆断的缺点,并且具有较好的生物相容性、透明性、可拉伸性及可穿戴性和可连续检测等优势[4-5]. 在柔性传感器的众多应用中,研究最为广泛的是电子皮肤,其要求材料能够满足人类皮肤柔韧性和可拉伸性的基本要求,同时还需具有可自愈功能以及较长的使用寿命[6]. 决定柔性传感器弹性形变能力的主要因素是基体材料,常用的有聚酰亚胺(PI)、聚对苯二甲酸乙二醇酯(PET)、聚萘二甲酸乙二醇脂(PEN)等柔性基底材料,但均存在不耐高温、柔性基底与薄膜材料间应力大、黏附力弱等缺点[7]. 聚二甲基硅氧烷(PDMS)因其杨氏模量低,柔韧性和拉伸性好,耐腐蚀性强,透明度高,化学稳定[8]且生物相容,易与其他电子材料结合[9],通过调配可获得良好的保形性[10],且制备操作简捷等优点而成为一类重要的柔性传感器材料. 胡友根等[11]采用丝网印刷技术与旋涂工艺制得PDMS-PS@Ag/PDMS-PDMS三明治结构的柔性电阻应变传感器,用于对人体运动的监测;但是丝网印刷与旋涂制备过程复杂,并且文章只报道了对手肘关节以及膝关节的弯曲测试,无定量分析. 戴宇[12]设计了一种基于PDMS的分布式柔性触觉传感器,通过单轴试验获得了不同质量比PDMS的非线性应力- 应变关系以及小变形下的杨氏模量,其制备传感器时采用光刻工艺,包括清洗玻璃基片、贴PET膜、均匀光刻、前烘、曝光、显影和坚膜等过程,制备工艺烦琐. Wang等[13]利用2层柔性PDMS薄膜之间填充导电薄膜,制备了非常灵敏和稳定的三明治结构的柔性电子皮肤,实现了对人体生理活动信号的灵敏测试,其局限性在于测试过程中电阻变化量小. 目前,柔性电子传感器件的导电层材料多选用碳系导电材料,如碳纳米管(carbon nanotube,CNT)[1,14-18]、石墨烯[19-27]和炭黑[28-32]等. Chen等[33]选用纳米线/石墨烯异质结构材料,利用气相沉积法制备压力传感器,其制备方法复杂费时,在测试过程中需要连接导电通路;Zhang等[34]利用干式迈尔杆涂层工艺(dry-Meyer-rod-coating),制备超细石墨片包裹蚕丝纤维的单纤维应变传感器,用来检测人体运动,其涂层包裹过程需要重复10次,并且产品只能承受30%的应变载荷;Park等[35]利用单壁碳纳米管(single-wall carbon nanotube,SWCNT)薄膜以及多孔PDMS制备了可拉伸电容传感器,用于检测和区分各种机械刺激,空气隙增大了电容传感器间距,增加了灵敏度,但测量过程缺少定量分析;Jian等[36]以CNT和石墨烯薄膜为导电层,PDMS为基板,制备了高灵敏度柔性压力传感器,该传感器接触面存在大量凸起,增大了表面粗糙度,使其具有较好的灵敏度;Boland等[37]将石墨烯渗透到天然橡胶中,制备出导电复合材料,用于监测关节和肌肉运动,以及呼吸和脉搏,在制备过程中需要2个主要步骤:石墨烯液体的剥离和石墨烯对橡胶的注入;Huang等[38]利用3D打印工艺制备了碳纤维(carbon fiber,CF)填充3450的导电橡胶,测试了打印的导电橡胶条在单向拉伸、压缩、弯曲、折叠和扭转等不同受力情形下的相对电阻值,并进一步打印出三夹层式电阻传感器,初步测试了其电阻随手腕弯曲状态的变化.
综上所述,碳系材料与PDMS复合的多层结构是目前柔性传感器的主流结构,而以两者均匀混合得到的导电橡胶作为传感器导电层材料仍有待进一步深入研究. 本研究将在前期研究的基础上,专注于导电橡胶三夹层拉伸应变传感器的研究,包括传感器的精细设计(基板材料和电阻丝间距确定)以及循环应变载荷下传感器的电阻响应特性及相应的机理分析. 选用CF填充PDMS作为导电层材料,硅橡胶3450为基板材料,采用3D打印工艺制备出2种间距的柔性电阻传感器,测试电阻传感器在循环拉伸应变载荷下的电阻变化,确定其对拉伸应变载荷的最佳响应范围;观察拉伸过程中导电橡胶内部纤维位置变化,分析纤维间距变化与电阻变化的关系;最后将该电阻传感器应用于手肘屈伸运动的测试.
1 试验材料与试验方法
1.1 试验材料与制备方法
1.1.1 试验材料
选用名义长度为50 μm的CF(北京化工有限公司)作为导电填料,将60 phr(100 g基胶中添加量)CF填充到PDMS(广东力翔有机硅有限公司)中制备成导电橡胶C-60CF-PDMS做导电层. 传感器基板层从硅橡胶3450(南星有机硅公司)和PDMS中选择.
1.1.2 制备方法
1) 传感器基板 将液体硅橡胶3450和PDMS置入3D打印针筒内,经前期真空除气后打印成50 mm×50 mm规格的正方形板,依次经150 ℃、5 min和170 ℃、10 min硫化后,测试2种材料的刚度,选择刚度大的材料作为基板材料.
2) 传感器导电层制备 设计了三夹层结构电阻传感器. 在确定的基板(下基板)上按照设计的路径打印液体导电橡胶C-60CF-PDMS,依次经150 ℃5 min和170 ℃10 min硫化获得传感器的电阻层,在电阻两端插入铜电极后,再次打印一层基板层覆盖在电阻层上作为上基板,得到电阻传感器. 导电橡胶打印的电阻网络间距分别设计为2、5 mm,并标记为电阻传感器RS-2和RS-5,RS-2的电阻丝长度约为RS-5的电阻丝长度2倍. 以RS-5为例其结构及制备工序如图1所示,基板尺寸为50 mm×50 mm,其实物如图2所示.
1.2 试验方法
1.2.1 基板刚度测试
刚度是弹性敏感元件在外力作用下变形抗力大小的量度,用K表示,且
K=dF/dx
(1)
式中:F为作用在弹性敏感元件上的外力;x为弹性敏感元件的变形量.

1.2.2 导电橡胶的显微形貌观察
利用金相显微镜(BX51M)对在一定拉伸应变载荷下导电橡胶中碳纤维的位置和间距变化进行观察.
1.2.3 拉伸应变载荷下传感器的电阻响应
设置三角波循环应变载荷,即6 s内线性加载到一定应变载荷ε(ε分别为30%、60%、90%和120%),再经6 s线性卸载到0,2次加载间隔10 s,用电阻传感器在拉伸应变载荷下电阻的变化ΔR/R0来评价其电阻响应,其中R0和ΔR分别为传感器的初始电阻和受载时的电阻变化量. 电阻传感器拉伸应变载荷下电阻值测试方式如图3所示. 由于在垂直于电阻丝长度方向施加拉伸载荷时其电阻变化较小,因此设计拉伸载荷与电阻丝长度方向一致.
进一步用应变系数(gauge factor,GF)来评价应变传感器的灵敏度,其大小主要取决于拉伸过程中传感器相对电阻变化率的大小,且
GF=(ΔR/R0)/(ΔL/L0)=(ΔR/R0)/ε
(2)
式中L0和ΔL分别为试样初始长度和应变载荷下的长度变化.
1.2.4 传感器对人体运动和循环机械加载的电阻响应
将传感器绑定在人体肘关节上,用万用表(Victor 86E)测试肘关节反复屈伸时传感器的电阻值. 测得人体肘部弯曲时的应变量约为15%,在组装好的拉伸试验机设备上施加15%的循环机械应变载荷,连续加载10 000周期,用万用表(Victor 86E)记录传感器的电阻.
2 试验结果与讨论
2.1 基板的确定
3450和PDMS两种打印结构在受压情况下的变形量及计算刚度如表1所示. 从表1可以看出,3450的平均刚度为27.6 N/mm,PDMS的平均刚度为12.7 N/mm,前者为后者的2倍之多. 因此选用3450作为传感器的基板材料,可以有效减小传感器制备过程中的变形.
2.2 循环应变载荷下传感器的电阻响应
RS-2和RS-5在不同三角波应变载荷下的电阻响应如图4所示. 2种电阻传感器RS-2、RS-5的初始电阻值分别为1.2 MΩ和0.58 MΩ.
从图4中可以看出,2种电阻传感器对循环应变载荷均表现出周期性的电阻响应,但两者幅度不同. 表2示出2种电阻传感器在不同应变载荷下的电阻变化率和相应的应变系数. 从表2可以看出,随着应变载荷的增大,传感器的电阻响应显著增大,表明制备的电阻传感器对拉伸应变载荷均有良好的响应,传感器在大应变量(60%~120%)时,其电阻相对变化极为明显,且RS-2(细间距)比RS-5更加显著,原因在于细间距电阻传感器(RS-2)中的电阻丝更长,初始电阻更大.
导电橡胶在拉伸过程中其内部CF的排列如图5所示. 从图5可以看出,随着拉伸应变量的增加,3条纤维A、B、C的相对位置和间距都发生了明显的变化,测量图中纤维A顶端到纤维B之间的水平距离,无载荷(ε=0%)时,纤维A、B两者靠近(间距为0),增大载荷(ε=60%)时,两者间距约为8.4 μm,进一步增大载荷(ε=120%)时,两者间距增大到17.8 μm左右. 同时观察B、C间的间距也随应变载荷而增大.
将导电橡胶中的纤维平面位置与导电橡胶的电阻简化为图6所示模型,图6(a)为导电橡胶内部纤维分布情形,图6(b)为以电流经过A、B与C并联电路为例的导电橡胶电阻等效电路,其中A、B、C分别表示导电橡胶内部的碳纤维,RA、RB、RC分别表示纤维A、B、C的电阻值,R2表示纤维A、B之间因隧道效应产生的隧穿电阻[39]. 电路等效总电阻R为
(3)
进一步变换得
(4)
继续简化电阻计算式(4),即令计算中所有单条纤维的电阻值相同,即RA=RB=RC=R1. 化简后等效总电阻R为
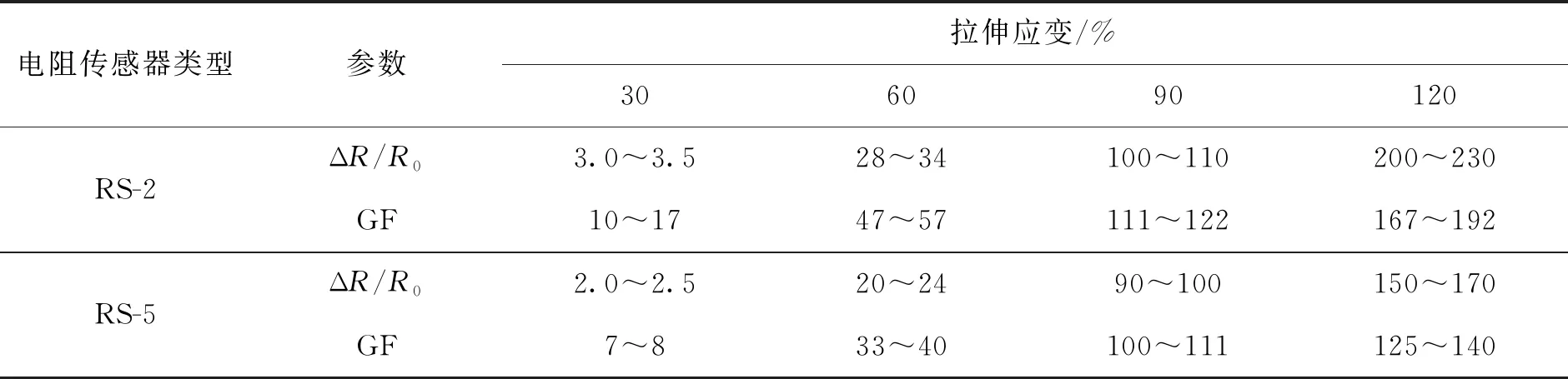
表2 2种电阻传感器在不同应变载荷下的电阻变化率和相应的应变系数
(5)
在拉伸过程中,纤维电阻值R1随应变载荷增加量较小,电阻R主要受隧穿电阻R2的影响.
Zhang等[40]认为,低电压下电路中相邻导电颗粒间的隧穿电流
(6)
式中:m为电子质量;e为电子电荷;h为普朗克常数;V为电压;L为颗粒之间距离;φ为两颗粒之间的势垒高度.
假设a2为发生隧道效应的有效横截面积,隧道效应产生电阻
(7)
(8)
从式(8)可以看出,隧穿电阻R2与应变量ε主要呈指数关系,并且随应变量增加而增大.
研究中对电阻传感器(RS-2)在拉伸过程中电阻变化率和应变载荷的关系进行拟合,得到
y=0.637exp(x/20.759)- 25.951exp(-x/12.614)+25.631
(9)
式中:y为电阻变化率(ΔR/R0);x为应变量(ε). 拟合曲线如图7所示,其拟合相关系数为0.99. 拟合结果表明该电阻传感器在拉伸过程中其电阻随应变载荷呈指数增长,与式(8)理论推导关系一致,说明在拉伸过程中导电橡胶的电阻变化主要受纤维间隧穿电阻R2的影响.
逐渐增大拉伸速率(100、200、300 mm/min),测得RS-2的电阻变化率如图8所示.
从图8中可以看出,在拉伸速率为100 mm/min时,电阻传感器的最大电阻变化率约为175;拉伸速率为200 mm/min时,其最大电阻变化率约为170;进一步提高拉伸速率为300 mm/min时,RS-2的最大电阻变化率为180左右. 结果表明,该电阻传感器的电阻变化与拉伸速率相关性不大,即对应变速率不敏感,具有实际应用价值.
2.3 传感器对肘部运动和循环机械加载的电阻响应
试验先期测得人体肘部弯曲时的应变量约为15%,将RS-2绑定在人体肘关节上,肘关节多次屈伸时测得该电阻传感器的电阻如图9(a)所示,图9(b)为该传感器在施加应变载荷15%的情况下连续机械加载10 000周期时的电阻变化情况.
从图9可以看出,肘关节的连续运动会引起柔性电阻传感器电阻值的连续变化,当肘部弯曲到最大程度时,传感器的电阻值达到最大值,约为1.3 MΩ;当手肘舒展至水平状态时,电阻值回复至大约0.6 MΩ. 在连续机械加载10 000周期中,该传感器的电阻变化规律亦如此,表明该电阻传感器重复性好,电阻信号稳定. 该柔性传感器的电阻值与肘部屈伸运动具有良好的对应关系及多次加载稳定性表明,基于导电橡胶制备的柔性电阻传感器具有良好的应用前景.
3 结论
在确定传感器基板材料的基础上,以3D打印工艺制备了基于导电橡胶的柔性电阻传感器,测试了电阻传感器在循环拉伸应变载荷下的电阻响应,分析了其电阻响应规律,并将其用于运动测试,得到以下结论:
1) 选择刚度较大的硅橡胶(3450)有利于减小电阻传感器制备过程中的变形,导电层的细间距打印有利于提高传感器的灵敏度.
2) 基于导电橡胶的柔性电阻传感器对循环拉伸应变载荷表现出周期性的电阻响应,特别是大应变(60%~120%)下其响应尤为显著;拉伸过程中电阻变化与应变载荷呈指数变化规律,其在拉伸过程中的电阻变化主要是缘于导电橡胶内部纤维位置变化导致隧穿电阻增大.
3) 基于导电橡胶的柔性电阻传感器其电阻响应与应变速率相关性不大,响应重复性好,适合于运动测试.
