基于Solidworks建模及有限元分析的核桃收获机的仿真设计
2020-11-10邹志勇别云波王琪吴向伟林萍
邹志勇,别云波,王琪,吴向伟,林萍
基于Solidworks建模及有限元分析的核桃收获机的仿真设计
邹志勇1,别云波1,王琪1,吴向伟1,林萍2*
(1.四川农业大学机电学院,四川 雅安 625014;2.盐城工学院电气工程学院,江苏 盐城 224051)
运用Solidworks建模,设计了一种核桃振动收获机,主要由夹持装置、激振装置及机架组成,通过激振器中偏心块运转产生的激振力作用于核桃树干上,侧枝上核桃被迫振动,产生大于果柄力的拉力,使果柄断裂、果实脱落。用UG对核桃树进行三维建模,导入Workbench进行模态分析,得到核桃树最适激振频率为15.41 Hz,夹持装置夹紧力为3.185 kN。对激振装置中偏心块进行参数设计,通过有限元分析,得偏心块固有频率为1 626.1~ 5 072.6 Hz;对偏心块结构静力进行分析,其形变为0.022 mm,应变为55.12 MPa,偏心块结构稳定,可满足设计要求。
振动式核桃收获机;激振装置;模态分析
传统的核桃收获是用竹竿对树体侧枝进行敲打,效率较低,还存在一定的危险性,已难以适应核桃规模化种植的需要,推广核桃的机械化采收,势在必行[1]。目前,大多利用振动原理来设计核桃采摘机械。肖勇等[2]研制的便携式振动核桃采摘机和詹超等[3]设计的核桃拍打采摘机,都通过振动果树侧枝的方式采摘核桃,但采用的动力偏小,对大规模果园的采收难以胜任,且都直接振动三四级枝条,易对核桃树树体造成损伤,影响第二年的结果。刘威等[4]研制的全自动核桃采摘装置,通过DGPS定位,对核桃进行识别采摘,但是整机的效率偏低,对核桃的图像处理上也存在一定的难度。国外的振动采摘机大多为大型自走式机械,作业效率高,采净率可达90%[5-7],但对果园的标准化要求都较高,并不适合现有的核桃密植化种植模式。
笔者针对当前核桃收获的安全与效率问题,拟设计一种基于振动原理的核桃收获机:首先对核桃振动收获机整体建模;然后对核桃树建模,通过模态分析得到树体固有频率,最后针对激振装置的关键部件偏心块进行参数设计,运用有限元分析法分析偏心块的稳定性,偏心块振动频率需大于采收频率,且应变要小于材料的屈服强度,以稳定工作。
1 核桃收获机的结构和工作原理
1.1 整机结构
振动式核桃收获机由夹持装置、激振装置、机架车座3个部分组成。用Solidworks三维建模后,导出收获机的俯视、正视结构简图,如图1所示。

1 小缓冲弹簧;2 橡胶前爪;3 夹持臂;4 夹持液压缸;5 偏心块;6 前后伸缩支架;7 伸缩液压缸;8 旋转液压缸;9 旋转轴盖;10 机架减震弹簧;11 车座;12 上下支撑液压缸;13 伸缩支撑杆;14 油箱;15旋转支撑架。
夹持装置通过液压缸带动连杆,对前爪进行拉伸与闭合,使得装置能够夹持树干,并在前爪处设计一个减震弹簧装置,以保护树干。
激振装置位于夹持装置后,包括3组偏心块组,通过液压马达带动,可产生前后、左右2种振动形式,可通过调节液压马达的转速,改变激振器的振动频率,能够针对不同树形调节频率,以达到最佳的振动采摘效率。
机架车座起支撑与连接收获机的作用,机架通过2对减震弹簧与激振器相连接,有利于减少激振器对核桃振动收获机的影响,防止机架受到振动而产生机械磨损及零件松动;机架也能通过液压缸及滑杆,做出对整个激振器和夹持装置的旋转和前进、后退等动作;而车座上的液压缸则可升降收获机,实现6个自由度采摘核桃。
1.2 工作原理
首先,夹持臂在液压缸的带动下,向夹持臂的中心点收缩,并夹住核桃树主干,随后激振装置中的偏心块在液压马达的带动下旋转,产生的激振力使核桃树干随着夹持装置一起振动,核桃果实在被振动过程中产生一定的加速度,产生惯性力,当这种惯性力大于核桃果实与果柄之间的连接力时,核桃果实发生脱落,即实现核桃的振动收获。
2 核桃树体的建模
振动采摘时核桃树体受力如图2所示。

图2 核桃树体受力分析
1为果实重力沿果柄方向的分力;1为果实与果柄连接处的法向惯性力;2为果实与果柄连接处的切向惯性力[8];3为果柄拉力,即果实与果柄之间的结合力。
在振动收获的过程中,果实与果柄的分离主要是由1与其余力结合产生总拉力,2并不参与的结合,若2足够大,使得连接果柄的主干树枝折断,则可不考虑2的作用[9-10]。欲使果实与果柄脱离,需满足<1+1=1+·cos,其中1=1=2,(·cos+2)>。1为1的法向加速度;当果柄拉力3小于拉力时,将会拉断果柄,果实脱落,其1与1大小由果实摆动角决定。
在四川省石棉县永丰核桃种植合作社,随机选取10株种植时间和生长环境相同,但树形各异的‘川早1号’核桃树,测量树体参数,结果平均树高4 508 mm,平均侧枝直径6.3 mm,平均主干直径80.7 mm,1.3 m处树干平均直径130.9 mm。
核桃树侧枝质量较轻,振动收获作业时摆动较小,核桃树的主干较粗壮,因而用振动收获机对其进行振动收获作业。用UG对核桃树体进行三维树体建模,寻求核桃树主干的固有频率。
分别对核桃树的主干和侧枝设置弹性模量、泊松比及密度。参照文献[10],确定木质材料的弹性模量为1.330 GPa,泊松比为0.3,密度为936.86 kg/m3。对核桃树模型进行网格划分,并对核桃树体模型施加载荷以及约束,设定树体模型的模态分析求解阶数为12。由于12阶中相邻阶的模态振型差别小,因而选取振型变化较大的图形观察其模态的变化,6阶模态振型如图3所示。

a、b、c、d、e、f分别为第1、3、5、7、9、11阶模态振型。
第1、3、5、7、9、11阶模态振型中固定频率分别为1.57、3.50、5.35、6.76、10.30、15.41 Hz。1阶模态振型中,树体顶端树枝处已经出现了弯曲形变;5阶模态振型中,核桃树侧枝受到振动,明显向下产生形变;11阶模态振型中,核桃树体形变量大,且主干顶端严重弯曲变形。
侧枝在5阶模态振型中的形变量最大,而主干则是在11阶模态振型中的形变量最大。根据树枝相应形变的变化量,判断核桃树体最适的采摘频率,可避开对主干伤害最大的共振频率,防止对整个核桃树共振损伤。
对核桃树建模模型进行谐响应分析,其12阶的频率响应如图4所示。

图4 树体模态的压力和位移频率响应
从压力频率响应看到,当频率为11.5 Hz与15.4 Hz时,出现了2个峰值,并且在11.5 Hz时的应力最大,在15.4 Hz时应力相对较小;在位移频率响应中,频率为15.4 Hz时的位移量最大,由此看出核桃树在11.5 Hz时发生了共振。为了保护树体不受共振产生损伤,对核桃采摘的最适频率宜选择15.4 Hz。
3 关键部件的设计
3.1 夹持装置
夹持头呈弧形,可增加包裹树干的面积,减少对树皮的损伤。连杆通过销钉连接起来,而连杆又与前爪固定相连接,其缝隙中放置有2个小型减震弹簧,整个夹持臂的夹持动作通过2个夹持液压缸控制开合程度。
夹持装置先控制2个液压缸进行伸长的动作,从而带动夹持臂动作,前爪也向内收缩,当夹持臂达到树干相应的直径,产生相应的夹紧力后,液压缸停止伸长,因前爪呈弧形,其前爪上橡胶具有一定的弹性,在挤压力的作用下,橡胶产生形变,紧紧包裹住树干,能增大整个夹持装置对树干直接接触的面积,减少由于机械振动对整个核桃树体造成磨损或折断;在前爪与连杆之间的小型减震弹簧能够减少树干反馈给核桃收获机的反作用力,从而保护收获机。
依据文献[11],夹持装置的夹紧力为,≥123123·Mg。式中:1、2、3分别为安全系数、工况系数,方位系数,M为夹持装置质量。核桃振动收获机的工作环境一般,取1=1.5;振动对象为核桃树,树体为静态,取2=1,3=1.25。利用Solidworks软件对夹持装置进行分析,添加模型材料属性,在20 ℃、密度7.85 g/cm3、弹性模量210 GPa、泊松比0.31时,得到夹持装置质量170 kg,其夹紧力为3.185 kN。至此,选取ROB50X350- CA-Y型液压缸,压力为7 MPa,缸径50 mm,杆径25 mm,最大行程350 mm。
3.2 激振装置
激振装置包括偏心块、旋转轴盖、激振箱和机架减震弹簧。每组偏心块由相对应的液压马达控制,旋转产生的激振力传递到夹持装置上,使夹持装置随之振动,从而带动树体振动。
3.2.1偏心块选取
偏心块采用扇型结构,安装在激振箱中3根轴上,每轴安装1组,每组2块偏心块,位于同一相位、同一水平上,如图5所示。

图5 偏心块的结构
考虑到核桃树体生长过程中会出现一定程度的弯曲,因而在两轴激振器中间,增加了1组偏心块,以防止在较弯曲核桃树干采摘过程中树体发生折断。在激振箱中的偏心块全部转动,其中偏心块1、6逆时针旋转,偏心块3、4顺时针旋转,2组偏心块相位相差180°,这时激振器产生2倍于左右方向偏心力;与此同时,偏心块2逆时针旋转,偏心块5顺时针旋转,这组偏心块的左右方向偏心力被抵消,产生前后方向偏心力,第3组偏心块与前2组偏心块共同产生的偏心力,作用于树干上。由于第1、2组产生了2倍的左右方向偏心力,而第3组产生了前后方向偏心力,树干在这2组偏心力的作用下产生振动,从而合成了类似于椭圆形的运动轨迹。由于每棵核桃树的弯曲程度不同,则可以通过椭圆的短径方向的偏心力对弯曲方向上进行夹持振动采摘,能够保护树干在弯曲方向上受到的偏心力不至于对树干造成再次弯曲伤害。
这种偏心块结构还能进行普通单、双轴偏心块独立的运转方式,以满足在左右、前后方向上的激振方式;并且通过上下、单双层进行独立及叠加旋转,可以增大其激振方式的偏心力,以调整激振装置的振幅。
3.2.2偏心块参数的确定


根据张合军等[13]对偏心块及偏心距的描述,计算偏心块结构尺寸。
偏心块的材料选用Q235钢,密度=7.85 g/cm3,弹性模量210 GPa,泊松比0.31,则偏心块质量为。

参考激振装置的结构尺寸与安装要求,偏心块的内孔半径0取20 mm,偏心块小圆半径2、偏心块厚度分别为32 mm、40 mm,可得出偏心块大圆半径1=134 mm。
在一组偏心块组中产生的最大激振力max为1个偏心块产生的惯性力大小4的2倍,其中2π,1=0.5 kg·m,=25 Hz,代入计算得:
max=24=212=12.36 kN。
由离心力可求得核桃树干在偏心块的作用下瞬时的位移n。
式中:max为核桃树振动过程中最大振幅;为偏心块相对于平衡位置的相位角。偏心块的频率超过核桃树干的频率时,核桃树的振幅也相应增大。当核桃树最大振幅max为10 mm,核桃树干发生最大位移,达到较好的振动效率,核桃果实在此刻最容易脱落,完成收获。
3.3 偏心块有限元分析
用UG进行偏心块三维建模。使用四面体网格划分方法对偏心块的三维模型进行网格划分后,添加约束,偏心块由于只在Z方向上发生转动,得到最适采摘频率为15.4 Hz,添加转速为500 rad/s的旋转载荷。
从偏心块模态振型(图6)中可以看到,偏心块在1阶到6阶频率为1 626.1~5 072.6 Hz,远大于偏心块运转时产生的激振频率,因而不会发生共振,可保证偏心块的稳定性。

图6 偏心块6阶模态振型
偏心块的等效弹性应变如图7所示,整体形变如图8所示,结果表明,偏心块旋转中心处所受应力最大,为55.12 MPa,远比偏心块材料Q235的屈服强度(235 MPa)小;在偏心块的外侧弧边形成的形变量最大,为0.022 mm,比偏心块尺寸小,表明偏心块的参数设计合理,能够在采摘作业时保持稳定。
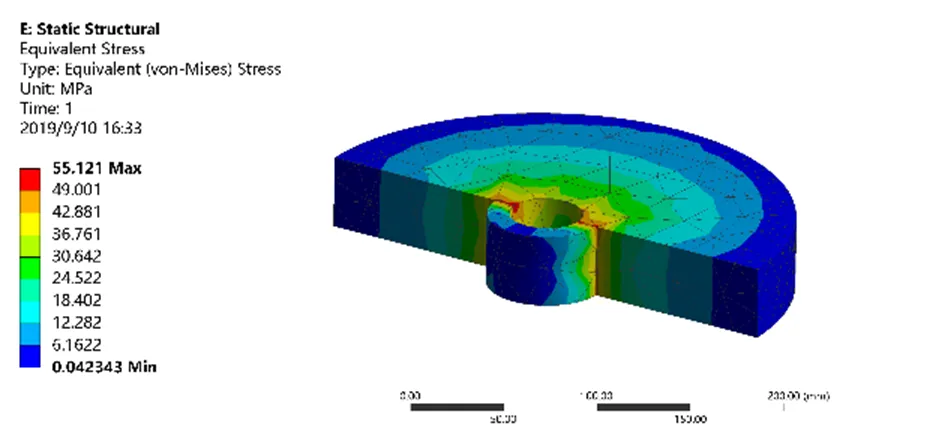
图7 偏心块模型等效弹性应变

图8 偏心块模型总体等效应力
4 结论
根据振动采摘原理,建立了振动式核桃收获机的三维模型。对核桃树进行三维建模,并进行模态分析,结果表明,‘川早1号’核桃树最适振动频率为15.4 Hz。
经计算,夹持装置夹紧力为3.185 kN,选用型号为ROB50X350-CA-Y液压缸;激振装置的偏心块,设计由3组偏心块组成,能根据每组不同初始相位与运转两两组合,实现前后、左右的振动,并且能增大2倍的振幅。分析得偏心块的固定频率为1 626.1~ 5 072.6 Hz,远大于系统产生的频率;通过静力学分析,偏心块形变为0.022 mm,应变为55.12 MPa,小于偏心块材料Q235的屈服强度,能够稳定工作。
该收获机体积较小,并未装备果实收集装置,因此还需进一步设计果实收集装置,以实现核桃采摘和收集功能的一体化。
[1] 蒲光兰,肖千文,吴开志,等.四川核桃种质资源表型多样性研究[J].湖南农业大学学报(自然科学版),2014,40(2):162-167. PU G L,XIAO Q W,WU K Z,et al.Research on the phenotypic diversity of walnut germplasm resources in Sichuan[J]. Journal of Hunan Agricultural University (Natural Sciences),2014,40(2):162-167.
[2] 肖勇,傅延祺,刘通,等.便携式电动核桃采摘机的设计与试验研究[J].农机化研究,2018,40(1):57-62. XIAO Y,FU Y Q,LIU T,et al.Design and experimental study of the portable motor-driven walnut picking machine[J]. Journal of Agricultural Mechanization Research,2018,40(1):57-62.
[3] 曹成茂,詹超,孙燕,等.便携式山核桃高空拍打采摘机设计与试验[J].农业机械学报,2018,49(3):130-137. CAO C M,ZHAN C,SUN Y,et al.Design and experiment of portable walnut high-altitude pat-picking machine[J].Transactions of the Chinese Society for Agricultural Machinery,2018,49(3):130-137.
[4] 刘威,王舜,岳涛涛,等.全自动核桃采摘装置[J].农业技术与装备,2017(3):69-72. LIU W,WANG S,YUE T T,et al.Design of fully automatic walnut picking device[J].Agricultural Technology and Equipment,2017(3):69-72.
[5] ERDOǦAN D,GÜNER M,DURSUN E,et al. Mechanical harvesting of apricots[J].Biosystems Engineering,2003,85(1):19-28.
[6] POLAT R,GEZER I,GUNER M,et al.Mechanical harvesting of pistachio nuts[J].Journal of Food Engineering,2007,79(4):1131-1135.
[7] CASTRO-GARCÍA S,BLANCO-ROLDÁN G L,GIL- RIBES J A.Vibrational and operational parameters in mechanical cone harvesting of stone pine(L.)[J]. Biosystems Engineering,2012,112(4):352-358.
[8] 高团结.果园核桃机械化采收装置的设计与研究[D].石河子:石河子大学,2014. GAO T J.Design and study the equipment of orchard walnut mechanical harvesting[D].Shihezi,China:Shihezi University,2014.
[9] 鲍玉冬,李志鹏,郭艳玲,等.振动式蓝莓采摘机对果实收获的影响试验[J].湖南农业大学学报(自然科学版),2014,40(1):96-100. BAO Y D,LI Z P,GUO Y L,et al.Effects of vibrating based picking machine on blueberry fruit harvest[J]. Journal of Hunan Agricultural University(Natural Sciences),2014,40(1):96-100.
[10] 吴道远.核桃树体建模及其果实采摘机设计[D].福州:福建农林大学,2017. WU D Y.Walnut tree modeling and the design of fruit picking machine[D].Fuzhou: Fujian Agriculture and Forestry University,2017.
[11] 王长勤,许林云,周宏平,等.偏心式林果振动采收机的研制与试验[J].农业工程学报,2012,28(16):10-16. WANG C Q,XU L Y,ZHOU H P,et al.Development and experiment of eccentric-type vibratory fruit harvester for forest-fruits[J]. Transactions of the Chinese Society of Agricultural Engineering,2012,28(16):10-16.
[12] 刘进宝,韩长杰,郭辉,等.偏心式林果采摘振动系统[J].农业工程,2013,3(1):68-71. LIU J B,HAN C J,GUO H,et al.Vibration system of eccentric-type fruit picking mechanisms[J].Agricultural Engineering,2013,3(1):68-71.
[13] 张合军,王军玮.几种常用偏心块偏心矩及其激振力的计算分析[J].矿山机械,1999(6):68. ZHANG H J,WANG J W.Calculation and analysis of the eccentric moment and exciting force of several commonly used eccentric blocks[J].Mining and Processing Equipment,1999(6):68.
Simulation design of walnut harvester based on Solidworks modeling and finite element analysis
ZOU Zhiyong1, BIE Yunbo1, WANG Qi1, WU Xiangwei1, LIN Ping2*
(1.College of Mechanical and Electronic, Sichuan Agricultural University, Ya’an, Sichuan 625014, China; 2.School of Electrical Engineering, Yancheng Institute of Technology, Yancheng, Jiangsu 224051, China)
A walnut vibrating harvester was designed based on Solidworks for 3D modeling,which is mainly composed of the clamping device, the exciting device and the frame.The eccentric block running in the shakergenerates the exciting force, which acts on the trunk of the walnut to vibrate the walnut on the side branch. When the pulling force greater than the stem force, the fruit stem could be break to cause the fruit to fall off.The 3D model of the walnut tree was set up by using UG and was imported into workbench for modal analysis. The optimum excitation frequency was obtained at 15.41 Hz with the clamping force of 3.185 kN. The eccentric block was designed and its natural frequency was revealed to be 1 626.1-5 072.6 Hz by finite element analysis. The static analysis of the eccentric block structure shows that the deformation is 0.022 mm and the strain is 55.12 MPa. The structure of the eccentric block is stable, which meets the design requirements.
walnut vibrating harvester; excitation device; modal analysis
S225.93
A
1007-1032(2020)05-0616-07
邹志勇,别云波,王琪,吴向伟,林萍.基于Solidworks建模及有限元分析的核桃收获机的仿真设计[J].湖南农业大学学报(自然科学版),2020,46(5):616-622.
ZOU Z Y, BIE Y B,WANG Q, WU X W, LIN P. Simulation design of walnut harvester based on Solidworks modeling and finite element analysis[J]. Journal of Hunan Agricultural University(Natural Sciences), 2020, 46(5): 616-622.
http://xb.hunau.edu.cn
2019-09-11
2020-07-08
国家自然科学基金项目(31601227、31501221、61803325);江苏省自然科学基金项目(BK20161310、BK20181049);国家住房和城乡建设部项目(2016-K1-09)
邹志勇(1984—),男,湖南衡阳人,硕士研究生,副教授,主要从事农业工程理论与技术研究,zouziyong111@163.com;*通信作者,林萍,博士,副教授,主要从事农业工程理论与技术研究,binglvcha007@126.com
责任编辑:罗慧敏
英文编辑:吴志立
