基于导管螺旋桨负载的ROV 推进器滑模控制
2020-11-10徐鹏程曾庆军陈尧伟朱志宇戴晓强凌宏杰
徐鹏程,曾庆军,陈尧伟,朱志宇,戴晓强,凌宏杰
(1.江苏科技大学 电子信息学院,江苏 镇江,212003;2.江苏科技大学 海洋装备研究院,江苏 镇江,212003)
0 引言
随着电机技术的不断进步和发展,大型遥控水下航行器(remote operated vehicle,ROV)中的液压推进器逐渐被电机推进器所取代。永磁同步电机(permanent magnet synchronous motor,PMSM)因具有控制性能好、可靠性高、设备简单、维护方便等优点,成为水下推进器电机的首选[1]。目前,ROV 多采用导管螺旋桨推进器[2],导管和螺旋桨作为负载直接影响推进器系统的运行性能。由于PMSM 是一个多变量、强耦合、非线性、变参数的复杂对象,当系统参数发生变化或受到外界不确定因素影响时,常规比例-积分(proportional-integral,PI)控制并不能满足高性能控制的要求。因此,研究基于导管螺旋桨负载特性的水下推进器PMSM 的控制成为研究ROV 的必然要求。
目前对ROV 推进器的研究主要分为水动力性能和推进电机运动性能两方面。文献[3]采用格子玻尔兹曼方法分析了导管螺旋桨的推力特性,结果表明在相同进速下导管螺旋桨能够提高推进器的推力系数。文献[4]分析了船舶航行过程中螺旋桨的动态响应曲线,为实际船舶起航和停车等操作提出依据。文献[5]采用径向基函数(radial basis function,RBF)和模型参考自适应系统(model reference adaptive system,MRAS)对鱼雷PMSM 的转子位置进行估计,提高了鱼雷PMSM 系统的动静态性能。文献[6]提出了一种混合非奇异终端滑模控制策略,应用该方法设计了PMSM 转速控制器,实现了状态变量的全局收敛,解决了终端滑模的奇异性问题。文献[7]提出了一种反向旋转的PMSM,设计了基于矢量控制的调速器,验证了矢量控制对于水下推进器电机控制的可行性。
针对辅助采油ROV 的水下推进器动力学特点,考虑导管螺旋桨在水流中旋转可能产生的扭矩变化和外部扰动对水下推进器系统动态响应产生的影响,将全局快速终端滑模(global fast terminal sliding mode,GFTSM)算法应用到水下推进器PMSM 的转速控制器中。建立了一种基于导管螺旋桨负载特性的水下推进器PMSM 运动控制的数学模型,提出新型GFTSM 算法设计转速控制器。该方法能够使系统状态在有限时间内收敛并快速接近平衡态,其不含切换项且连续的控制律,消除了滑模控制固有的抖振现象。其对系统不确定和干扰的鲁棒性,使推进器能够在复杂的水下环境中稳定高效地运行。最后,通过数值仿真,比较分析了不同控制算法下PMSM 的动态响应性能,验证了文中设计的全局快速终端滑模控制器在水下推进器控制上的可行性和有效性,为辅助采油ROV 的运动控制和动力分配策略的研究提供了参考。
1 辅助采油ROV 及其推进器组成
1.1 辅助采油ROV 结构组成
文中所述辅助采油ROV 可用于水下1 500 m内海洋采油树辅助作业,其中ROV 本体结构组成包括浮体、框架、推进器、电子舱、机械手、摄像头、水下灯和液压舱等,其虚拟装配图如图1 所示。从图中可见,ROV 共配备了6 个推进器,以实现ROV 的运动控制。
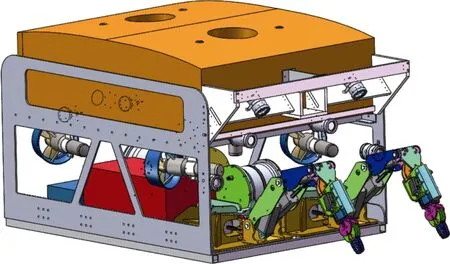
图1 辅助采油ROV 虚拟装配图Fig.1 Virtual assembly drawing of underwater assisted oil recovery ROV
1.2 辅助采油ROV 推进器结构组成
辅助采油ROV 的水下推进器如图2 所示。其结构由导管、螺旋桨、磁耦合器、PMSM、驱动电路和端盖连接线组成。
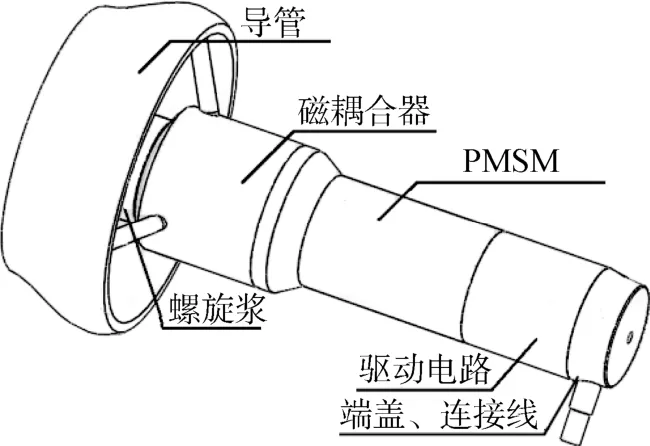
图2 水下推进器Fig.2 Underwater propeller system
电机的转子连接磁耦合器的输入轴,由PMSM 带动磁耦合联动装置,磁耦合器的输出轴连接螺旋桨,从而实现螺旋桨与电机转子的同步转动,进而达到电力传动的效果。导管能够将桨叶的尾涡转化为导管的附着涡,有效地起到整流作用,增大推力。磁耦合器可以有效隔离海水,实现水下推进器的静密封[8]。
1.3 水下推进器控制系统组成
采用传统的转速、电流双闭环控制策略,建立基于矢量控制的水下推进器控制系统框架,其控制原理如图3 所示。GFTSM 的转速控制器采用改进转速环的控制算法,实现对PMSM 更加准确的控制;电流环采用 PI 控制,其参数设计采用内模控制策略,缩减了控制器的调节参数;螺旋桨作为负载加载在 PMSM 输出轴上。

图3 水下推进器控制系统框图Fig.3 Block diagram of control system for underwater propeller
图中,Udc为三相逆变器的直流母线电压;ia、ib、ic分别为PMSM 的三相电流;iα、iβ分别为两相静止坐标系下α轴和β轴的电流;id、iq分别为两相旋转坐标系下d轴和q轴电流;θe为转子磁极d轴相对定子a相绕组或α轴的转子空间位置角;ωe为电机的电角速度;nref为水下推进器控制系统的输入参考转速;ψf为永磁体与定子交链的磁链;Ld、Lq为电机定子的电感;对于文中的表贴式三相PMSM,有Ld=Lq=Ls;为PI 电流环的参考电流;分别为PI 环得到的d、q轴电压;分别为α、β轴电压。
2 基于导管螺旋桨负载的ROV 推进器系统数学模型
水下推进器采用PMSM 作为动力来源,同时考虑导管螺旋桨作为负载对其运行可能产生的影响,为实现对水下推进器的动态性能分析,需建立PMSM 和导管螺旋桨的数学模型。
2.1 PMSM 数学模型
为简化分析,假设三相PMSM 为理想电机,且满足下列要求: 1) 忽略电机铁芯的饱和;2) 不计电机中的涡流和磁滞损耗;3) 电机中的电流为对称的三相正弦电流。文中表贴式三相PMSM 在d-q坐标系下的电压方程为

式中:R和Ls分别为定子电阻和电感;Te为电磁转矩;pn为电机的极对数;TL为负载转矩;J为电机转动惯量;ωm为电机机械角速度。
2.2 导管螺旋桨负载模型
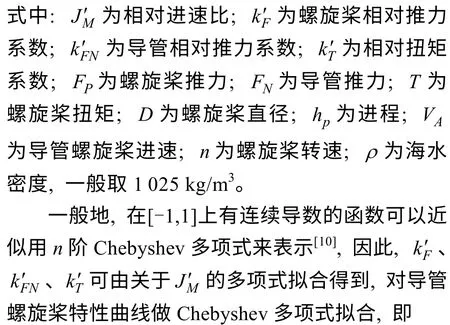
螺旋桨的推力系数kF、导管的推力系数kFN、扭矩系数kT和进速比JM的定义为[9]

由于水下推进器的运动可分为四象限,需要对JM进行修正。修正方程为
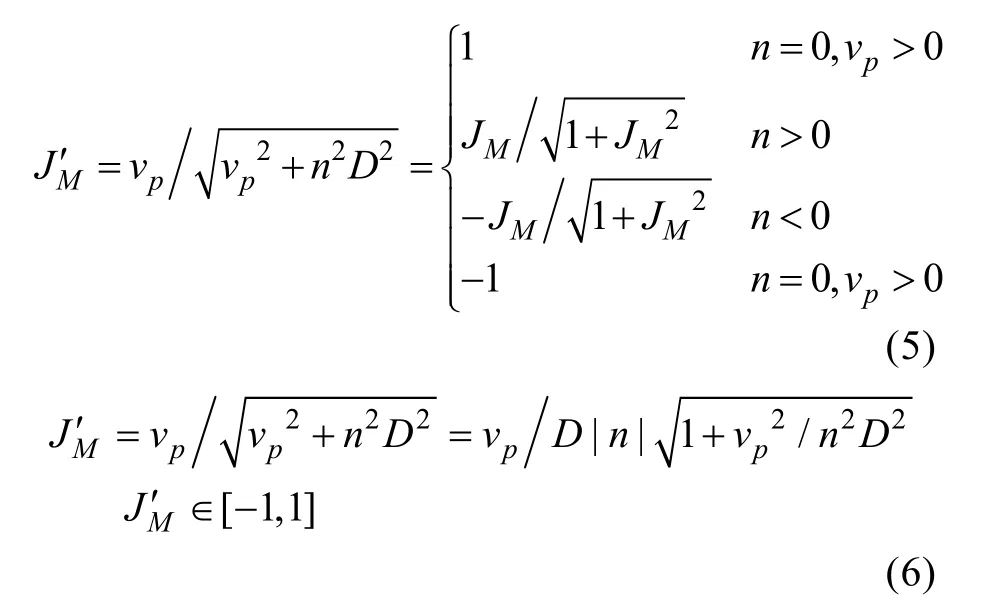
同样,在转速n和进速vp不同时为零时,相应的螺旋桨的推力系数、导管的推力系数、扭矩系数也要进行修正,即

在实际水下推进器仿真中,考虑计算精度和效率,选用8 阶Chebyshev 多项式拟合式。
为便于仿真,常将上面得到的8 阶多项式转换成普通多项式,转换结果为

式中:m为水下推进器本体质量;λ为水下推进器x轴向运动的附水质量;根据经验附水质量可取水下推进器总质量的5%~15%;Pe为导管螺旋桨产生的有效推力;P为水下推进器敞水状态下的推力;t为推力减额系数;R为水下推进器总阻力;Ω为水下推进器表面湿面积;vs为水下推进器航速;ω为伴流系数[11]。
导管螺旋桨的伴流分数和推力减额分数与同样设计条件下普通桨的数值不尽相同,由于目前尚缺乏这方面的试验资料,故在设计导管螺旋桨时,伴流系数、推力减额分数及相对旋转效率仍近似地采用普通桨的数值。对于文中水下推进器,采用经验公式来确定伴流系数和推力减额系数,即


表1 导管螺旋桨推力和扭矩普通多项式系数b0~b8Table 1 Duct propeller thrust and torque common polynomial coefficient b0~b8

式中:CB为水下推进器的方形系数;n为螺旋桨实际转速;ne为螺旋桨的额定转速;t和ω为n的连续函数。
3 基于GFTSM的PMSM转速控制器设计
3.1 GFTSM 控制器设计
对于文中研究的表贴式水下推进器PMSM,采用id=0的转子磁场定向控制方法,即可获得较好的控制效果,式(1)~(3)可变为

式中:ωref为电机的参考转速,通常为一常量;ωm为实际转速。
状态方程为

3.2 稳定性分析

由于Δ邻域受的约束,只要选取足够大的γ和p/q就可使滑模面s1=0 的Δ邻域足够小。所以,系统的性能主要依赖于L、p、q值的选择。
4 仿真与实验
为验证所设计系统的可行性和可靠性,需要对系统进行仿真与实验验证。文中自主研发的水下推进器系统关键参数如表2 所示[12]。
4.1 MATLAB 仿真
为了验证文中设计的GFTSM 转速控制器在水下推进器系统中的优越性,将导管螺旋桨负载模型作为PMSM 的负载,形成水下推进器仿真系统;同时建立基于 PI 转速控制器和基于传统SMC 转速控制器的水下推进器仿真系统。将上述2 个控制器与基于GFTSM 控制器的水下推进器的动态响应结果相比较。其中,GFTSM 控制器的参数设置为α0=97、β0=99、p0=11、q0=9、p=7、q=5、φ=190、γ=3 500。

表2 水下推进器系统关键参数Table 2 Key parameters of underwater propeller system
为了保证对比的公平性,调节基于PI、传统SMC 和GFTSM 控制器的参数,使系统在相同转速给定下具有较优的抗负载及外部扰动的能力。图4~图9 分别为1 800 r/min 和400 r/min 2 种工况下基于PI、传统SMC 和GFTSM 转速控制器的推进器系统动态响应曲线。
同一工况下,分别将图6(a)与图4(a)、图5(a)进行比较、将图6(b)与图4(b)、图5(b)进行比较,可以看出,基于PI、传统SMC 和GFTSM 的3 个推进器系统的转速响应时间分别为0.02 s、0.13 s和0.01 s、转矩稳定时间分别为0.15 s、0.13 s、0.12 s。其中前2 个系统的转速响应均有超调,且基于 PI 调节器的系统出现了小幅振荡,基于GFTSM 转速调节器的推进器系统可以在短时间内到达稳定且没有超调,动态响应性能好。此外,在导管螺旋桨负载下,基于PI 转速调节器的推进器系统出现了振荡;基于传统SMC 转速调节器的推进器系统有明显的抖振现象;基于GFTSM转速调节的推进器系统没有明显的抖振现象。对比图4~图9 可以看出,在1 800 r/min 和400 r/min 2 种工况下,基于PI 和传统SMC 推进器系统的动态均出现超调,且在低转速时出现了较大的振荡,而基于GFTSM 的推进器系统动态响应未出现超调,且能在短时间内到达稳定状态。

图4 1 800 r/min 时基于PI 的推进器系统动态响应Fig.4 Dynamic response of propeller system based on PI at 1 800 r/min

图5 1 800 r/min 时基于传统SMC 的推进器系统动态响应Fig.5 Dynamic response of propeller system based on traditional SMC at 1 800 r/min
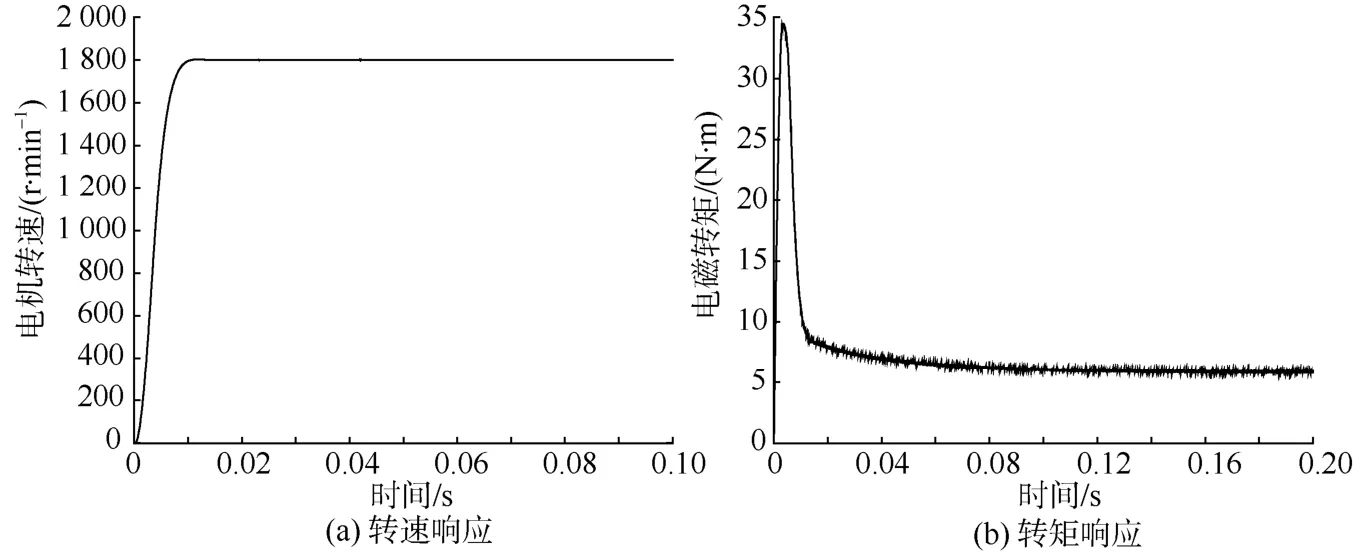
图6 1 800 r/min 时基于GFTSM 的推进器系统动态响应Fig.6 Dynamic response of propeller system based on GFTSM at 1 800 r/min

图7 400 r/min 时基于PI 的推进器系统动态响应Fig.7 Dynamic response of propeller system based on PI at 400 r/min

图8 400 r/min 时基于传统SMC 的推进器系统动态响应Fig.8 Dynamic response of propeller system based on traditional SMC at 400 r/min
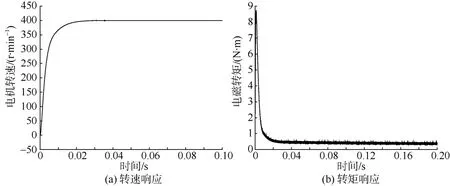
图9 400 r/min 时基于GFTSM 的推进器系统动态响应Fig.9 Dynamic response of propeller system based on GFTSM at 400 r/min
4.2 水池实验
为了验证自主研发水下推进器的科学性与实用性,在水池对水下推进器进行了测试,导管螺旋桨水下推进器实物如图10 所示。

图10 导管螺旋桨水下推进器实物Fig.10 Underwater propeller of ducted propeller
通过杠杆支架将推进器固定于水下1 m 深度,水面上安装测力计方便读出推力大小,同时记录推进器在工作时的电压、电流、空载转速等参数,并通过计算得到水下推进器的扭矩。实验系统如图11 所示。

图11 推进器水下实验Fig.11 Underwater experiment of propeller
从实验中可获得如表3 和表4 所示的实验数据,并绘制如图12 和图13 所示的水下推进器推力实验波形和扭矩实验波形。
从图中能够看出,所设计的水下推进器达到了设计技术指标,但由于电机正反转的特性使得正反转推力、扭矩存在细微差别,正反转特性不是完全一样的。
5 结束语
针对自主研发的辅助采油ROV 运动控制与推进系统的控制需求,提出了一种新型的基于导管螺旋桨动态负载特性的ROV 推进器PMSM 滑模控制器。考虑导管螺旋桨在水流中旋转可能产生的扭矩变化和外部扰动对水下推进器系统动态响应产生的影响,将GFTSM 算法应用到水下推进器PMSM 的转速控制器中,提升了系统的快速性和鲁棒性。经过理论分析和仿真研究,可以得出将导管螺旋桨的动态负载特性引入到水下机器人推进器的动力系统的模型中,对水下机器人的运动控制和动力分配具有工程指导意义。

表3 水下推进器正转实验数据Table 3 Forward rotation experimental data of underwater propeller

表4 水下推进器反转实验数据Table 4 Backward rotation experimental data of underwater propeller

图12 水下推进器推力数据波形Fig.12 Thrust data waveform of underwater propeller

图13 水下推进器扭矩数据波形Fig.13 Torque data waveform of underwater propeller
相比于PI 和传统SMC 控制器,文中设计的GFTSM 控制器能够使系统转速更迅速地收敛到平衡状态,且在导管螺旋桨负载特性下,能够对系统的不确定性和外部干扰具有较好的鲁棒性,消除传统滑模存在的系统抖振。研究中,假设导管螺旋桨负载在敞水条件下,与真实应用情况下的负载特性存在一定差异。下一步需要利用水动力分析软件对不同流速下导管螺旋的负载特性进行分析,并将其引入到水下机器人推进器系统中进行更深入的研究。
