快速反射镜控制回路设计与仿真
2020-11-05方连伟史守峡
方连伟,史守峡
(中国航天科工集团二院二十五所,北京 100854)
1 引 言
快速反射镜(Fast Steering Mirror,简称FSM)作为光发射端与光接收端之间控制光束指向的精密光学仪器,集光、机、电技术于一身,具有系统带宽宽、响应速度快、定位精度高、位置分辨率高等优点,通常与大惯量转台一起构成复合轴系统,广泛应用于激光跟瞄、激光通讯、自适应光学等高精密光学系统中。同时,随着FSM价格的降低,其应用领域逐步推广到光刻技术的光束跟踪、激光眼科手术的光束跟踪、航空领域等[1-2]。
长期以来,由于快速反射镜的重要性,国内外关于FSM的研究步伐一直没有停止[3-4]。在国外,在20世纪80年代初美国木撒诸塞州技术研究所(MIT)研制了一种基于柔性轴的高带宽快速反射镜;在20世纪80年代中期美国左手研究所(Left Hand Design Corporation,LHDC)与喷气推进实验室(JPL)合作设计了一种用于补偿航空系统微位移的双轴柔性指向式FSM;2005年,美国的络可西德·马丁公司(Lockheed Martin Space Systems Company,LMT)设计了一款基于PZT的大带宽、高精度三自由度FSM。在国内,国防科技大学、华中理工大学、中国科学院长春光学精密机械与物理研究所、中国科学院光电技术研究所等多家高校及研究机构开展了快速反射镜相关技术的研究,并取得了丰硕的成果。
目前,要求反射镜能够大范围转动的同时具有大的反射口径,满足此类要求的快速反射镜大多采用音圈电机驱动,其转动角度可以达到几十个毫弧度,反射镜面的口径可达百毫米级。而压电陶瓷驱动快速反射镜由于压电陶瓷致动器伸缩量的限制,不能兼顾大转动角度和大口径反射镜面,两者互为制约。但与音圈电机驱动快速反射镜相比较,压电陶瓷驱动快速反射镜具有体积小、重量轻等优点。
针对上述问题,本文讨论了在不改变音圈电机和微位移传感器结构尺寸的前提下,通过优化音圈电机和微位移传感器的结构布局提高伺服机构的空间利用率、缩小快速反射镜体积的结构形式。同时,针对该结构布局引入的音圈电机驱动轴系与微位移传感器敏感轴系存在夹角的问题,通过建立坐标系、推导快速反射镜伺服机构(下称伺服机构)的数学模型等手段,引入解算网络,降低控制系统的设计难度,并在此基础上设计控制回路,实现快速反射镜闭环控制。
2 快速反射镜的工作原理与结构形式
2.1 快速反射镜工作原理
快速反射镜是一种精密光学仪器,通常由快速反射镜电路和伺服机构两部分组成。其中快速反射镜电路由控制器和功率驱动器两部分组成;伺服机构由柔性支撑、执行器、微位移传感器、光学反射镜支架以及承载上述各组成部分的基座等组成,组成框图如图1所示。

图1 快速反射镜组成框图
快速反射镜电路将输入指令与位移传感器测量的反射镜角度之间的偏差进行校正并放大,放大后的功率信号驱动安装在反射镜背部的音圈电机,实现反射镜角度的调整,进而实现光束指向的调整。
2.2 伺服机构结构形式
本文讨论的快速反射镜伺服机构的结构形式见图2。

图2 伺服机构结构示意图
为了有效利用结构空间,缩小快速反射镜伺服机构的体积,将音圈电机和微位移传感器交错均布在以柔性支撑结构轴线为圆心的圆周上。这种布置方式可以有效利用结构空间,同时提高位置的分辨率,实现在有限的空间内快速反射镜系统的高精度控制。音圈电机和微位移传感器的空间排布图如图3所示。

图3 音圈电机和微位移传感器排布图
在本方案中,称传感器所构成的轴系为系统轴系X-O-Y,音圈电机所构成的轴系为驱动轴系α-O-β,系统轴系与驱动轴系之间的关系见图4[5]。

图4 系统轴系与驱动轴系之间的关系
图4中,θx表示驱动轴系α轴与系统轴系X轴之间的夹角,X轴绕O点逆时针转向α轴为正;θY表示驱动轴系β轴与系统轴系Y轴之间的夹角,Y轴绕O点逆时针转向β轴为正。
3 控制回路设计
3.1 伺服机构传递函数
基于图3所示音圈电机和为位移传感器的排布方式,快速反射镜伺服机构的传递函数可表示成式(1)的形式:
(1)
式中,φx、φy表示快速反射镜绕X-O-Y轴系转动的角度;uα、uβ表示在α驱动轴系和β驱动轴系施加的控制电压;GXα(s)表示控制电压uα与转动角度φx之间的传递函数、GXβ(s)表示控制电压uβ与转动角度φx之间的传递函数;GYα(s)表示控制电压uα与转动角度φy之间的传递函数、GYβ(s)表示控制电压uβ与转动角度φy之间的传递函数。
进一步,式(1)可写成:
(2)

当驱动电机驱动反射镜面在驱动轴系α和β分别转动ψα角和ψβ角时,投影到系统轴系X-O-Y上的角度分别为ψXα、ψYα、ψXβ和ψYβ,ψα与ψXα和ψYα、ψβ与ψXβ和ψYβ之间变换关系为:
ψXα=ψαcosθX
(3)
ψYα=ψαsinθX
(4)
ψXβ=ψβsinθY
(5)
ψYβ=ψβcosθY
(6)
则反射镜面绕系统轴系X轴转过的角度φX和Y轴转过的角度φY为:
φX=γα-X-ψβ-X=γαcosθX-ψβsinθY
(7)
φY=γα-Y+ψβ-Y=γαsinθX+ψβcosθY
(8)
联合式(7)、(8),反射镜面绕系统轴系转动角度与绕驱动轴系转动角度之间的关系写成阵的形式见式(9):
(9)
则矩阵CXY-αβ可写为:
(10)
式中,Cαx表示角φx与角ψα之间的耦合系数;Cβy表示角φY与角ψβ之间的耦合系数;CαY表示角φY与角ψα之间的耦合系数;CβX表示角φX与角ψβ之间的耦合系数。
驱动轴系的传递函数表示驱动电机输入电压u与驱动轴系摆镜转角ψ之间的关系,其方块图如图5所示[6-8]。

图5 驱动轴系方块图
由图(5)可推导出传递函数为:

(11)
式中,Km表示音圈电机的力矩系数;J表示光学反射镜及支架绕柔性支撑机构旋转中心的转动惯量;Ke表示音圈电机的反电势系数;Ks表示柔性铰链的弹性系数;R表示音圈电机的内阻;L表示音圈电机的电感。由传递函数可以看出,基于柔性支撑的快速反射镜为三阶系统。
为克服音圈电机的反电动势,通常采用电流驱动方式,将功率放大器、音圈电机的动圈及反馈网络构成电流环。由于所构成电流环的开环增益近似于功率放大器的增益,远远大于音圈电机的反电动势系数Ke,因此图5中的反电动系数Ke可忽略不计,式(11)简化为:
(12)
传递函数可分别写成:
对于α轴向,其转角ψα与驱动电压uα之间的传递函数为:
(13)
对于β轴向,其转角ψβ与驱动电压uβ之间的传递函数为:
(14)
综合式(3)~(14),伺服机构传递函数可写成:
(15)
记:
GB(s)
式(15)可写成:
Φ(s)=GB(s)U(s)
(16)

3.2 控制器设计
控制器由求和网络、解算网络、校正网络和陷波器等组成,主要完成控制指令的接收、微位移传感器信号的采集、偏差信号的形成及校正、不希望频点的滤波等功能,控制器的输出信号作为功率驱动电路的输入信号[9-10]。控制器组成框图见图6。

图6 控制器组成框图
由于快速反射镜系统带宽宽,为避免放大控制回路中的高频噪声进而对控制回路产生影响,校正网络避免使用超前-滞后校正网络用以提高系统的开环相位裕度,仅采用滞后-超前校正网络或比例-积分校正网络实现对偏差信号的校正。滞后-超前校正网络校正形式如式(17)所示。

(17)
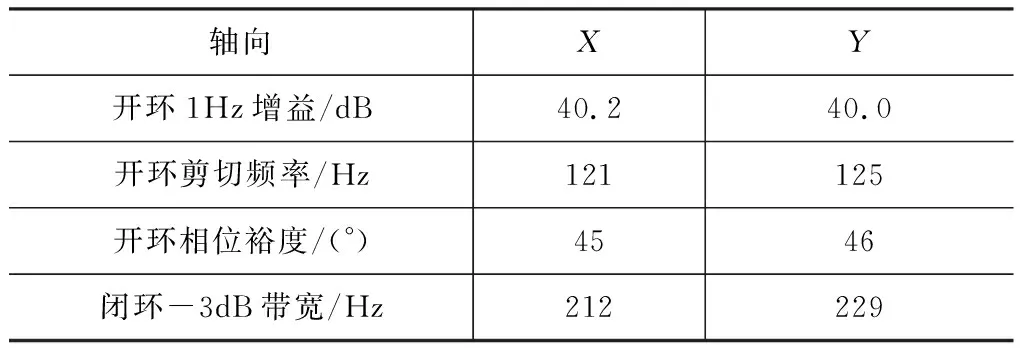
式中,τi 由于柔性支撑结构在低频段存在双二阶特性的谐振模式,如果该谐振模式在回路中没有得到有效的抑制,系统无法拓展带宽。为了得到预期的系统带宽,在控制器中加入陷波器环节以抑制该谐振模式[7]。该陷波器实为双二阶网络滤波器,传递函数见式(18)。 (18) 式中,取ωzki=ωpki;i=1,…,n;ωzki的含义是期望被截止的频点。 图6中的解算网络的作用是将偏差从X-O-Y坐标系转换到α-O-β坐标系。有: (19) 控制器的传递函数可写成: GC(s)=GBEF(s)GLag-Lead(s)Cαβ-XY (20) 搭建快速反射镜线性系统方块图如图7所示。 图7 快速反射镜线性系统方块图 快速反射镜线性系统方框图由解算矩阵、校正网络、伺服机构等构成,其开环传递函数可描述为: G(s)=KpGB(s)GC(s) (21) 式中,Kp表示反馈增益阵,取: 利用Matlab/Simulink从频域和时域两个维度进行系统理论仿真。 (1)频域特性仿真 利用Matlab/Simulink自带的Linear Analysis线性系统分析工具进行频域仿真,分别得到开环幅频特性曲线和相频特性曲线、闭环幅频特性曲线和相频特性曲线,见图8(a)、图8(b)。 观察图8,系统闭环幅频特性曲线-3 dB点的频率值为218 Hz,系统开环幅频特性曲线穿越频率为121 Hz、相频特性曲线相位裕度为47.3°,系统工作稳定。 图8 仿真伯德图 (2)时域特性仿真 对系统分别输入2.0 mrad阶跃信号,幅值10 mrad、频率1 Hz的正弦波激励信号10 sin(6.28 t),以及幅值0.1 mrad频率200 Hz的正弦波激励信号0.1 sin(1256 t),观察仿真输出。仿真输出见图9、图10和图11。 对仿真结果进行分析,当输入幅值0.1 mrad频率200 Hz的正弦波激励信号时,快速反射镜最大摆动幅度约为0.08 mrad,-3 dB带宽大于200 Hz,该结果与从仿真伯德图分析得到的-3 dB系统带宽为212 Hz相吻合。 图9 2.0 mrad阶跃响应 图10 1 Hz,10 mrad正弦信号激励响应 图11 200 Hz,0.1 mrad正弦信号激励响应 为了验证系统模型的准确性,针对自行研制的一款口径为100 mm、光学反射镜转动角度为±10 mrad的双轴快速反射镜样机进行了性能测试,快速反射镜机构原理样机见图12。 图12 快反镜机构原理样机 搭建实验平台,实验平台由快速反射镜伺服机构、功率放大器、PC/Matlab及dSPACE半实物仿真系统等构成[11]。实验平台示意图见图13。 图13 实验平台组成 测试项目包括频域特性测试和时域特性测试。 (1)频域特性测试 通过Agilent 35670A对实验验证平台输入幅值0.1 mrad、频率范围为1~500 Hz的正弦扫频信号,获取闭环幅频特性和相频特性、开环幅频特性和相频特性。实验结果见表1。 表1 闭环、开环测试数据 表1中,实测开环1 Hz增益与线性模型相差6 dB,是由于伺服机构非线性引起的。 (2)时域特性测试 对该平台分别输入幅值为0.2 mrad的阶跃信号、幅值1.0 mrad频率1 Hz的正弦波激励信号、以及幅值0.1 mrad频率200 Hz的正弦波激励信号,其响应曲线分别见图14、图15和图16。 图14 2.0 mrad阶跃响应 图15 10.0 mrad、1 Hz正弦波响应 对实测数据分析,当输入幅值0.1 mrad、频率为200 Hz的正弦波激励信号时,快速反射镜偏转角度最大约为0.08 mrad,快速反射镜-3 dB带宽约等于200 Hz。 仿真数据和实测数据进行对比分析,两组数据大致吻合,验证了理论分析模型的准确性。 本文通过优化快速反射镜音圈电机和微位移传感器的结构布局,实现了小体积的快速反射镜。对优化后的结构布局引入交叉耦合的问题提出在控制回路中串接解算网络的解决办法。应用Matlab/Simulink搭建了快速反射镜控制回路,并对控制回路仿真。集成快速反射镜原理样机,搭建快速反射镜测试平台,对原理样机进行性能测试。原理样机的测试结果与控制回路的仿真结果大致吻合,证明了通过在控制回路中加入的解算网络的有效性。该研究为快速反射镜的研制提供了理论依据,对后续产品的设计和调试具有指导意义。 图16 0.1 mrad、200 Hz正弦波响应

4 系统仿真实验
4.1 理论仿真





4.2 原理样机测试




5 结 语

