基于ANSYS Workbench 的送料机器人机械手静力学分析
2020-11-05苏长青丁凯元薛凯勋刘浩淼
苏长青 丁凯元 薛凯勋 刘浩淼
(沈阳航空航天大学 安全工程学院,辽宁 沈阳110136)
随着经济社会的发展,机器人的应用已经非常普遍,送料机器人是能在高温、高压等极度恶劣的环境中工作的机器人,它具有操作方便,效率高等特点,它在某种程度上代替了人类的工作。因此对送料机器人的研究是有十分重要的意[1]。
本文以送料机器人机械手为研究对象,利用ANSYS Workbench 软件建立了送料机械手的静力学模型,并进行了静力学分析,得到其大臂和小臂的应力、应变云图。不但证明了机械结构的可靠性,也为相关的部件的设计制造提供了设计依据。
图1 送料机器人整体示意图
1 静力学模型的建立
图1 为将送料机器人机械手用CATIA 将模型导入到ANSYS Workbench 中[2]。
2 网格划分
网格划分是有限元分析的关键步骤之一,直接影响到计算结果的精度和正确性。本文采用自由网格划分,如图2、图3 所示。
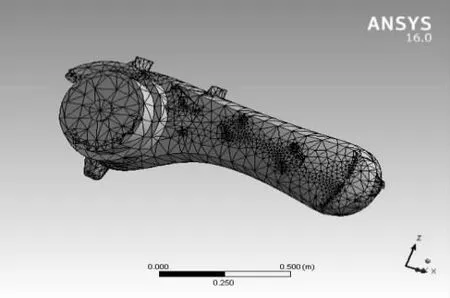
图2 小臂的网格划分
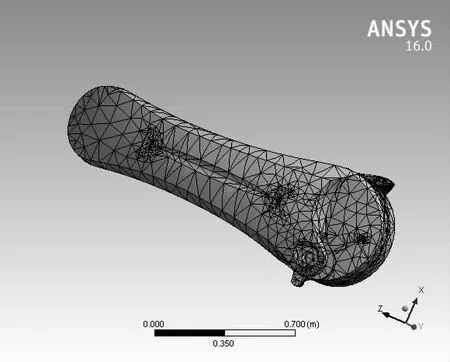
图3 大臂的网格划分
3 大臂和小臂的静力学分析
其分别有两个工作极限状态,一是转动到水平位置,一是转动到竖直位置。分析计算之后,应力、应变云图如图4~图7所示[4]。
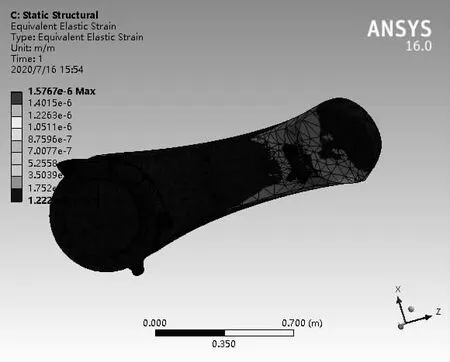
图4 大臂水平方向应变云图
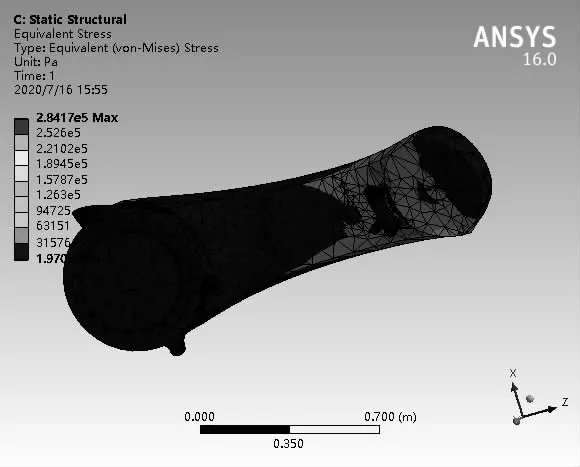
图5 大臂水平方向应力云图
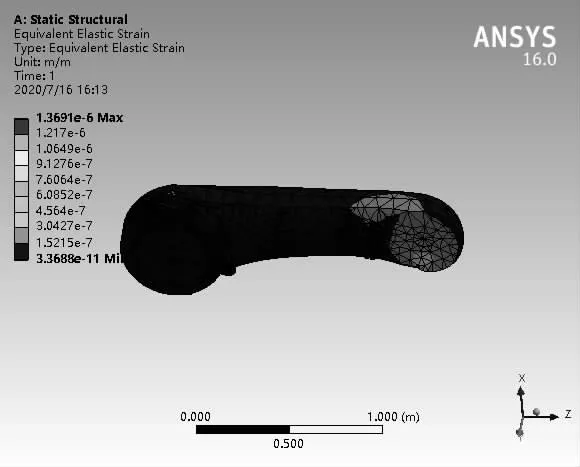
图6 大臂竖直方向应变云图

图7 大臂竖直方向应力云图
由图4~图7 可知:送料机器人机械手大臂在水平方向最大应变为1.5767×10-6m,竖直方向最大应变为1.3691×10-6m;同理可得,送料机器人机械手小臂在水平方向最大应变为3.7643×10-5m,竖直方向最大应变为6.1803×10-6m;由此可知,符合要求。
4 结论
通过静力学分析,从应力、应变云图中可看出,在正常工作状态下应力、应变均在可承受的范围之内。所以说送料机器人机械手的结构设计合理,为下一步的设计优化提供可靠的基础[5]。
