自抗扰控制框架下的摩擦力振动分析1)
2020-11-03朴敏楠王颖周亚靖孙明玮张新华陈增强
朴敏楠 王颖 周亚靖 孙明玮,2) 张新华 陈增强
*(南开大学人工智能学院,天津 300350)
†(空间物理重点实验室,北京 100076)
**(北京自动化控制设备研究所,北京 100074)
引言
摩擦力广泛存在于各种机电系统,是影响控制性能的关键因素[1-3].在低速运动时,摩擦力会诱发极限环振动.对于给定的控制器,准确地分析极限环振动对控制参数选取以及决定是否更改控制策略有重要的指导意义.
尽管PID 控制及其各种改进形式是运动控制中最常用的算法,其单自由度控制结构下固有的抗扰和跟踪性能矛盾问题一直是寻求性能更佳控制器的动力.为改进传统PID 控制,中科院系统科学研究所韩京清研究员提出了一种新的工程化控制方法—ADRC[4].该方法将串联积分器视为系统标准型并采用扩张状态观测器(extended state observer,ESO)对总扰动进行实时估计.具有两自由度控制结构的ADRC通过ESO 和误差反馈控制律可以实现抗扰和跟踪性能的分开设计.近些年来,ADRC 在运动控制平台上得到了越来越多的成功应用[4-10].由于ADRC 的等效控制律中存在积分作用,在低速运动时容易产生极限环或者黏滑振动.目前,ADRC 框架下的摩擦力振动研究甚少,仅有的工作也是基于描述函数法[8-9],得出的分析结果在只有库伦摩擦力时精度尚可,但是当考虑静摩擦力时却存在较大的误差[11].
在已有文献中,摩擦力振动分析基本都是针对PID 控制或者PD 控制,主要采用描述函数法、代数方法、相平面法和非线性动力学系统分析方法[11-20].描述函数法是一种近似方法,仅适用于分析在有限时刻速度为零的极限环,因此具有一定的局限性.针对一类仅包括静摩擦力和库仑摩擦力的单自由度运动系统,文献[14] 采用精确的代数方法证明了任何可以使系统稳定的PID 控制参数组合都会产生极限环.代数方法虽然能够提供准确的分析结果,但是由于需要计算解析解,其仅适用于低阶控制系统(三阶及以下)和特定的静态摩擦力模型.针对静态摩擦力模型,文献[15-17]采用相平面法将三维控制系统降为一维,并通过事件对映(event map) 分析了不同摩擦力模型以及参数对平衡点集和极限环的影响.对于带有Stribeck 效应(零速度附近的摩擦力骤降)的指数摩擦力模型,文献[17]中结果表明Stribeck 负斜率参数会直接影响极限环解的个数、稳定性以及能否通过参数整定消除极限环.该结论可视为文献[14]中结论的拓展,对现实中能够通过PID 参数调节消除极限环的一些情形进行解释.尽管事件对映是一种直观有效的分析方法,但是由于需要将系统用一维对映来表示,其仅适用于静态摩擦力模型,无法对包括更为复杂的动态摩擦力模型的运动控制系统进行分析.随着计算能力的增强,针对一般非线性动力学系统的分析工具如打靶法、轨迹跟踪(path following)、分岔图、Floquet 理论等被弓入到闭环的摩擦力振动分析中[18-27].该方法能够对包含一般摩擦力模型的系统进行分析.针对静态切换摩擦力模型[21]和动态LuGre 模型[28],文献[18]采用简单打靶法结合轨迹跟踪得到关于控制增益的极限环解枝轨迹.结果表明包含这两种摩擦力模型的系统呈现出非常相似的特性,当控制增益大于某一临界值时,极限环会消失.文献[19-20] 联合解析方法和数值方法,针对三阶控制系统采用打靶法结合二分法在理论参数范围内计算令极限环消失的最小积分泄漏值.文献[22]采用分岔图对设计状态观测器和摩擦力前馈补偿策略的闭环系统进行极限环分析.
基于上述分析,本文研究ADRC下的极限环振动.首先,考虑两种典型的静态和动态摩擦力模型,设计不同阶次的ADRC,并得到其等效形式以沿用PID 控制下的结论以及与PID 控制进行比较.为了准确计算高阶控制系统的极限环,采用非线性动力学系统的分析工具[29-32],使用打靶法结合拟弧长延拓跟踪关于ESO 带宽的极限环解枝.通过计算Floquet 乘子(floquet multiplier,FM) 判断极限环的稳定性、分岔点的出现以及类型.拟弧长延拓方法能够克服传统局部延拓方法不能顺利通过折叠点的缺点.此外,通过雅可比矩阵和近似数值方法对两种系统平衡点集的局部稳定性进行了分析.最后,通过仿真研究了Stribeck 负斜率参数、控制器阶次、误差反馈调节带宽以及观测器带宽对极限环以及平衡点集的影响,并对比两种摩擦力模型下的结果.所得结论可以解释一些现实情形并对参数整定提供一定指导.
1 模型介绍与控制器设计
考虑一类二阶运动系统

其中,J是转动惯量,θ 是转动角度,u是控制电压,cm是输入增益,Ff是摩擦力.现实中的摩擦力特性多种多样,为了描述这些特性,不同复杂程度的摩擦力模型相继被提出,主要分为静态摩擦力模型和动态摩擦力模型.文中选用两种经典模型,静态切换模型[21]和动态LuGre 模型[28].切换模型可表示为

其中,η 是角速度阈值,σ2是滑动摩擦力系数,Fs是最大静摩擦力,α 是自定义的停滞阶段的加速度,的形式为

其中,Fc是库伦摩擦力,ωs是Stribeck 角速度.该模型包括三部分,即滑动阶段、由停滞切换到滑动的过渡阶段以及停滞阶段.通过弓入α 定义停滞状态可以避免传统Karnopp 模型[33]的数值不稳定问题,并且使得控制系统微分方程组变为非刚性,提高数值积分效率.Stribeck 效应指的是克服最大静摩擦力之后摩擦力绝对值的迅速减小,是产生极限环振动的主要原因[34].β 决定了Stribeck 效应的负斜率,即摩擦力在低速时的变化速度,是影响极限环振动的关键参数.为了描述预滑动、滞后回线、可变最大摩擦力等现象,文献[28]提出了LuGre 模型.该模型假设接触面在微观上是不规则且粗糙的,两个刚体通过一些弹性鬃毛接触.鬃毛的平均变形用z表示,其动态为

摩擦力可由鬃毛的挠曲产生,可表示为

其中,σ0是鬃毛刚度,σ1是微观阻尼系数.
现基于式(1)设计角度控制器.首先将式(1)改写为

其中,b0=cm/J,d=-Ff/J.下面设计降阶扩张状态观测器(reduced-order extended state observer,RESO)[36]对摩擦力进行估计.假设角度和角速度信号同时可测,则分别可以设计一阶或者二阶RESO.当采用角速度作为输入时,可设计一阶RESO
其中,w为中间状态,ωo为观测器带宽,ˆd为摩擦力估计.得到摩擦力估计后,控制律可设计为

其中,θd为参考指令,kp和kd分别为比例和微分增益,为了便于分析,这里根据参数化带宽ωc将其设计为

由文献[35-36]可知,式(7)和式(8)下的等效控制律就是PID 控制,因此已有文献中关于PID 控制在极限环振动上的结论同样适用于针对二阶对象设计一阶RESO 的情形.基于文献[14,17-18]中PID 控制下的结果,可以得到ADRC 下的几个关键结论:
(1)针对只包含静摩擦力和库伦摩擦力的静态模型,任何可以使系统稳定的ADRC 参数组合都会产生极限环[14].
(2)针对切换模型(2),当β <1 时,平衡点集是不稳定的,稳定极限环一直存在且不能通过调节ADRC参数消除(与结论(1) 吻合); 当β >1 时,平衡点集是局部稳定的,在一定ADRC 参数范围内,稳定和不稳定极限环同时存在且能够通过调节ADRC 参数消除[17].
(3)针对LuGre 模型(5),当β=2 时,极限环振动特性和切换模型下β=2 时基本一致[18].
当采用角度作为输入时,可设计二阶RESO

其中,w1和w2为中间状态,l1和l2为观测器增益,为了便于分析,这里根据参数化带宽ωo将其设计为

基于式(10) 可以得到RESO 对扰动估计的传递函数为

其中,L 表示拉氏变换运算符号.可以看出扰动估计的本质为扰动的低通滤波输出.显然,ωo越高,越能够快速地跟踪和补偿摩擦力.因此,ωo是影响极限环振动的关键参数.此外,ωo的取值会受到测量噪声、未建模高阶动态等因素的限制.结合式(6)、式(8)和式(12)可以得到控制量在零初始条件时的拉氏变换为
其中,e=θd-θ.可以看出ADRC 的等效控制律包括PD 控制、误差积分滤波输出、误差滤波输出和角速度滤波输出.基于式(13),定义新的闭环系统状态
其中,x1,x2,x3分别是误差、误差导数和误差积分,x4是误差的低通滤波输出.相比于PID 控制,闭环系统增加了误差滤波状态x4,上述结论(1)~(3)可能不再适用,因此是本文的研究重点.将系统状态重构为式(14)是为了揭示出控制器的本质以及便于将后面得到的结果与PID 控制的结果进行比较.在研究极限环振动时,不失一般性,令θd=˙θd=¨θd=0.对于切换模型,闭环系统可表示为

其中,切换函数fs为
其中
对于LuGre 模型,闭环系统可表示为

其中,x5=z.针对系统(15)和(19),本文研究控制参数ωc,ωo以及摩擦力参数β 对极限环存在性以及稳定性的影响.对于给定的控制和摩擦力参数,问题的关键即为准确地求解出自治系统(15)和(19)的全部周期解.
2 系统周期解计算与分析
对于系统(15)和(19),极限环的计算和分析方法相同,该部分仅针对系统(15)进行介绍.系统(15)是自治系统,即等式右端的向量场不与时间t显式有关,不失一般性,起始时间可设为0.假设φt(x0,λ)为系统(15) 在初始条件x0=[x1(0)x2(0)x3(0)x4(0)]T下的解,其中,λ 为某个参数变量.求解极限环即为求解一个两点边值问题
其中

则ci可由下式解出
基于式(21)可得

其中,带下标i的变量表示解枝上第i个点对应的值,


现采用牛顿迭代法对式(25)进行求解
其中,下标k(k=1,2,···)表示迭代次数
则待求解变量的迭代公式为

在每次迭代中,都需要多次在不同初始状态和控制参数下进行仿真,即将一个两点边值问题转化为多次的初值问题求解,这就是打靶法的思想.重复上述迭代过程直至满足终止条件

其中,ε1>0 和ε2>0 为充分小的值以保证求解精度.传统局部延拓法在折叠点处存在奇异问题,无法通过折叠点继续跟踪解枝.拟弧长延拓法通过弓入拟弧长变量,可以避免奇异问题从而顺利通过折叠点.当y为一维时,该方法的简化原理图如图1 所示.
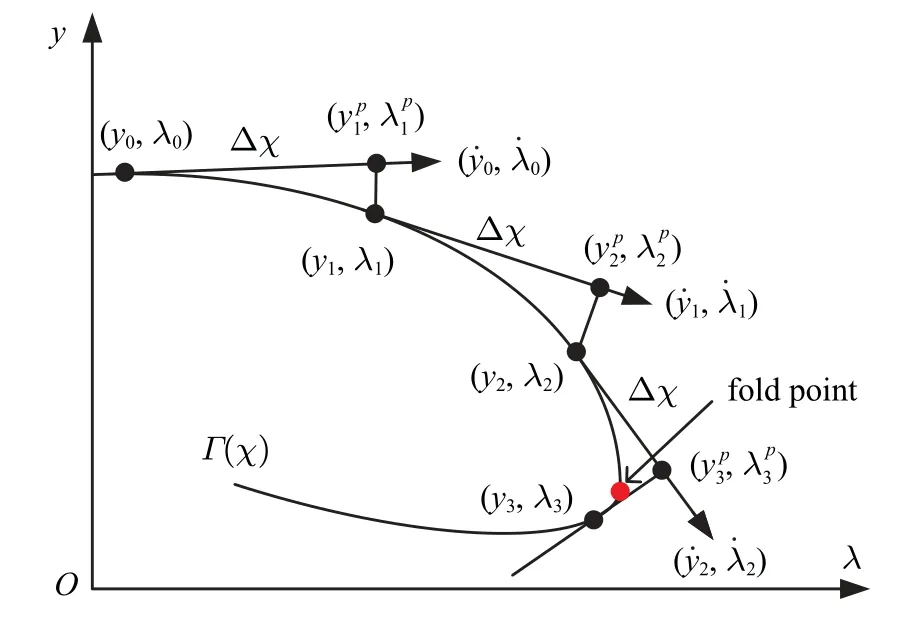
图1 拟弧长延拓方法原理Fig.1 Principle of pseudo arc-length continuation method
极限环的稳定性以及解枝可能出现的分岔由单值矩阵的特征值FM 判断.当所有FM 位于单位圆内时,极限环是稳定的.随着控制参数连续变化,当某个FM 的模变为大于1 时,系统将出现动态分岔,稳定周期解被破坏[38-40].根据FM 变化情况的不同,可能出现3 种分岔:环面折叠分岔(cyclic fold bifurcation,CFB)、倍周期分岔(period doubling bifurcation,PDB)和环面分岔(torus bifurcation,TB).具体来说,当有一个FM 沿着实轴从(1,0)穿出单位圆时,将出现CFB;当有一个FM 沿着实轴从(-1,0)穿出单位圆时,将出现PDB;当有一对共轭的FM 穿出单位圆时,将出现TB.
3 平衡点集与局部稳定性
该部分首先介绍LuGre 模型下的平衡点集以及稳定性判定.由LuGre 模型性质可知[16],|z(t)| ≤Fs/σ0.因此,系统(19)的平衡点集为

其中,|γL| ≤Fs/σ0.误差、误差导数以及误差滤波输出在平衡点处都为零,鬃毛变形产生的摩擦力由积分作用产生的控制力完全补偿.平衡点集的局部稳定性可通过计算雅克比矩阵的特征值确定.由于Lu-Gre 模型是非光滑的,在求解雅可比矩阵时需要使用广义微分[41].向量场f(x)在点x处的广义微分定义为包含左导数f′-和右导数f′+的最小闭凸包
根据式(39)可以得到系统(19)在处的雅可比矩阵为
其中,I5×5为五阶单位矩阵,各系数为

当ωc>0 且ωo>0 时,可以得到全部系数为正.根据Hurwitz 判据,平衡点集稳定的充要条件为
其中,P(ρ)是关于ρ 的三次多项式,因此,只需要计算P(ρ=-1)、P(ρ=1)和极小值就可以判断式(44)是否成立.
按照切换模型的定义,系统(15)的平衡点集为

其中,|γS| ≤Fs.由于系统(15) 是Filippov 型不连续的,无法采用雅可比矩阵判断平衡点集的稳定性.和连续微分方程组相比,判断不连续微分方程组平衡点集稳定性的理论和方法尚不完善,已有方法大多是通过构建非常复杂的非光滑Lyapunov 函数[42-43].考虑到不是本文的研究重点,这里采用一种近似的数值方法.通过大量仿真,发现x1对解轨迹影响最为显著.因此,对某个平衡点进行x1方向的摄动,在(0,xs)(xs为相应参数下稳定极限环的幅值)区间内选择n个值作为摄动值,在每个摄动值下进行仿真并观察状态能否最终收敛到平衡点集.对于存在摄动值使得仿真结果收敛到平衡点集的情况,即可判断此时平衡点集是局部稳定的,而且这个分析结果是准确的.对于所有摄动值下仿真结果都不会收敛到平衡点集的情况,即可判断此时平衡点集是不稳定的,但是这个分析结果是近似的,因为初始条件没有遍历整个状态空间.
4 计算结果
仿真模型参数为[18]

求解器选用ode45 算法,相对和绝对容许误差限设置为10-10(需小于切换模型的角速度阈值η).参数摄动量ξ 取为初始状态或控制参数的1%,且绝对值不小于10-8以避免数值敏感问题.Δχ 分段进行取值,当跟踪稳定解枝时,取为2,当某个FM 的模接近1 时,减小Δχ 至0.01 以顺利经过比较尖锐的折叠点.迭代精度参数设计为ε1=10-6,ε2=10-4.
4.1 基于二阶ESO 和切换模型的计算结果

图2 β=2 时切换模型系统分岔图(实线:稳定解枝,虚线:不稳定解枝)Fig.2 Bifurcation diagram for the switch model system with β=2(solid line:stable branch,dashed line:unstable branch)
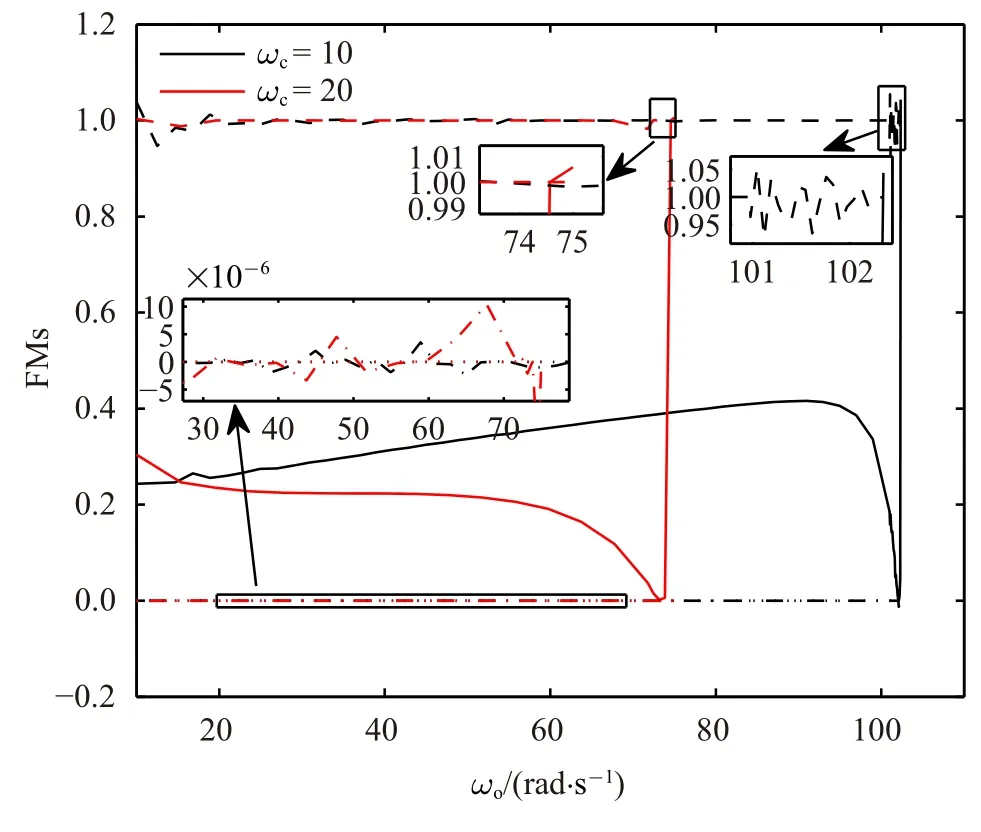
图3 β=2 时切换模型系统稳定解枝的FMs(实线:FM1,虚线:FM2,点线:FM3,点划线:FM4)Fig.3 FMs of stable branch for the switch model system with β=2(solid line:FM1,dashed line:FM2,dotted line:FM3,dot dash line:FM4)

图4 β=2 时切换模型系统的稳定极限环周期Fig.4 Period of stable limit cycle for the switch model system with β=2
首先令β=2.ωc=10 rad/s 和ωc=20 rad/s 时的分岔图、FMs、极限环周期如图2~图4 所示.在以下分岔图中,同时描述了周期解和平衡点集(x1=0),实线表示周期解或者平衡点集是局部稳定的,而虚线则表示周期解或者平衡点集是不稳定的.由于极限环可能是非对称的,在图2 中,max(x1)表示一个极限环周期内角度的最大值(以下简称为极限环幅值).在解枝起始点,ωo=10 rad/s,相应的极限环是稳定的.随着ωo的增大,极限环幅值不断减小.当ωo增大到某个临界值时,有FM 沿实轴从(1,0)穿出单位圆,出现CFB,并通过CFB 产生不稳定解枝,此时对应的ωo称为.需要说明的是,任意微小的扰动都会使得不稳定极限环的轨迹不能够保持,不稳定极限环在现实情形中几乎不可能出现.因此,其求解只具有理论意义,不具有实际意义.由于不稳定极限环求解计算量很大,这里只计算出了不稳定解枝的一部分,但不影响结论.当ωo<时,系统中存在两个相近的稳定和不稳定周期解;当ωo=时,两个周期解汇聚一起;当ωo>时,系统中极限环消失.对平衡点进行x1方向上的摄动,摄动值为(0,xs) 区间内均匀选取的1000 个点.通过大量仿真发现,当|x1(0)| <|xu|(xu为相应参数下不稳定极限环的幅值)时,轨迹会趋于系统平衡点集; 当|xu| <|x1(0)| <|xs|时,轨迹会趋于稳定极限环.所以平衡点集在所选参数范围内是局部稳定的,且在x1方向的吸弓域近似为|x1|<|xu|.此外,从图2 可以看出,ωc越大,相同ωo下的极限环幅值越小,对应的也越小.FMs 如图3 所示,其中FM1随ωo变化明显,FM2始终接近于1,FM3和FM4一直接近于0.FM1在CFB 附近先是骤减然后突然穿越1.FM2在1 附近的波动可认为是由数值计算误差造成的,不能够用于判断是否出现分岔,因为其变化范围很小且趋势性不明显.上述结果和文献[18] 中PID 控制器下的结果很相似,只是多了一个始终接近于0 的FM.稳定极限环的周期如图4 所示,可见周期变化非单调,呈现先减后增的趋势,且ωc越大,周期越小.

图5 β=0.9 时切换模型系统分岔图(实线:稳定解枝,虚线:不稳定解枝)Fig.5 Bifurcation diagram for the switch model system with β=0.9(solid line:stable branch,dashed line:unstable branch)
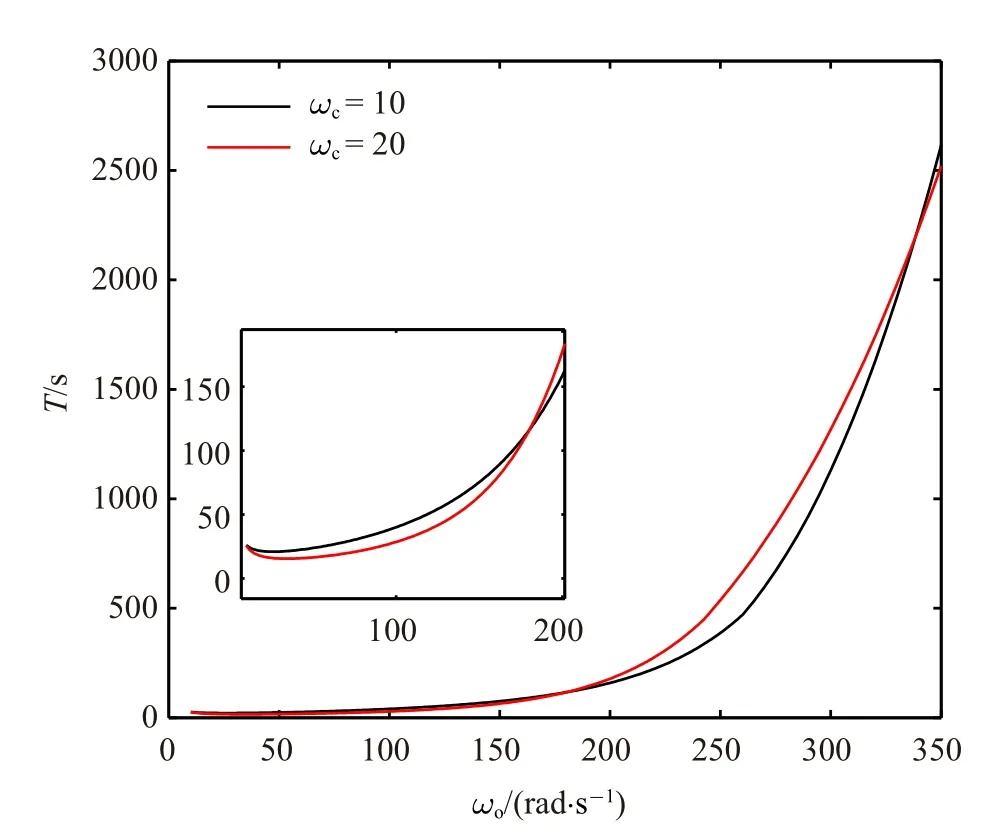
图6 β=0.9 时切换模型系统的稳定极限环周期Fig.6 Period of stable limit cycle for the switch model system with β=0.9
为研究摩擦力参数对极限环的影响,令β=0.9.对于切换模型,β 越小,由停滞切换到滑动状态时,在|x2| <ωs速度范围内获得的角加速度就越大,越容易产生超调,从而越容易诱发极限环.β=0.9 时的分岔图和周期图如图5 和图6 所示.当极限环幅值接近于零时,由于计算量过大终止计算.同样,从ωo=10 rad/s 开始跟踪稳定的极限环解枝.随着ωo增大,极限环幅值不断减小,周期呈现先减后增趋势.在计算的参数范围内没有出现动态分岔.相比于β=2 时结果,β=0.9 时的极限环幅值更大且更加难以消除,即使观测器带宽很高时,仍不能够彻底消除极限环.需要说明的是,当极限环幅值非常小且周期非常长时,极限环解虽然存在但是在某些实际应用背景下不会影响控制性能.对平衡点进行x1方向上的摄动,ωo=10,n=1000 时,ωc=10 和ωc=20 条件下能够仿真到的最小初始角度xm分别是1.06 × 10-5(xm=xs/1000,xs=1.06 × 10-2) 和3.36×10-6(xm=xs/1000,xs=3.36×10-3),此时仍有极限环产生,可近似地认为平衡点集是不稳定的.令n取为更小值也是可以的,这样能够使得初始角度进一步在小于1.06×10-5和3.36×10-6范围内进行尝试,但是会存在以下几个问题.首先,当初始角度非常小时,仿真时间会非常长,计算结果也会受到数值计算精度的影响.其次,即使角度间隔取得非常小,稳定性分析结果仍然可能不是准确的,因为初始状态摄动还是只考虑了第一个状态,没有遍历整个状态空间.所以,文中令n=1000 即可满足要求.在每个ωo下,最小初始角度摄动下的轨迹都会趋于稳定极限环,所以可以近似判断平衡点集在所选参数范围内是不稳定的.当ωc=10 rad/s 和ωo=30 rad/s 时,β=2 和β=0.9 下的时域仿真结果如图7 所示.可以看出,β=2 时的周期解满足x1(t)=-x1(t+T/2),而当β=0.9 时,这种对称性被破坏.因此,可以推断随着β 的减小周期解会出现对称破缺性分岔(symmetry breaking bifurcation,SBB)[23].

图7 β=0.9,2 时切换模型系统的角度极限环Fig.7 Angular position limit cycle for the switch model system with β=0.9,2
4.2 基于二阶ESO 和LuGre 模型的计算结果
为研究动态和静态摩擦力模型对极限环振动的影响,采用LuGre 模型重复上述过程.当β=2 时,仿真结果如图8~图10 所示.和切换模型在β=2 时的结果相似,随着ωo的增大,有FM 沿实轴从(1,0)穿出单位圆,出现CFB,并通过CFB 产生不稳定解枝.极限环幅值和周期与切换模型下的结果比较接近,稍小于切换模型对应的新增加的一个FM 在0 附近波动.β=0.9 时的分岔图如图11 所示.可见系统中依然出现了CFB,且比β=2时的更小,这一点和切换模型正好是相反的.对于切换模型,β 的减小增大了摩擦力的补偿难度,即使ωo取值非常大也不能够消除极限环.然而对于Lu-Gre 模型,β 的减小反而降低了摩擦力的补偿难度.可以看出β 在静态和动态摩擦力模型中有着不同的影响.按照前述方法验证平衡点集的稳定性,可以得到所有考虑参数范围内的平衡点集都是局部稳定的.
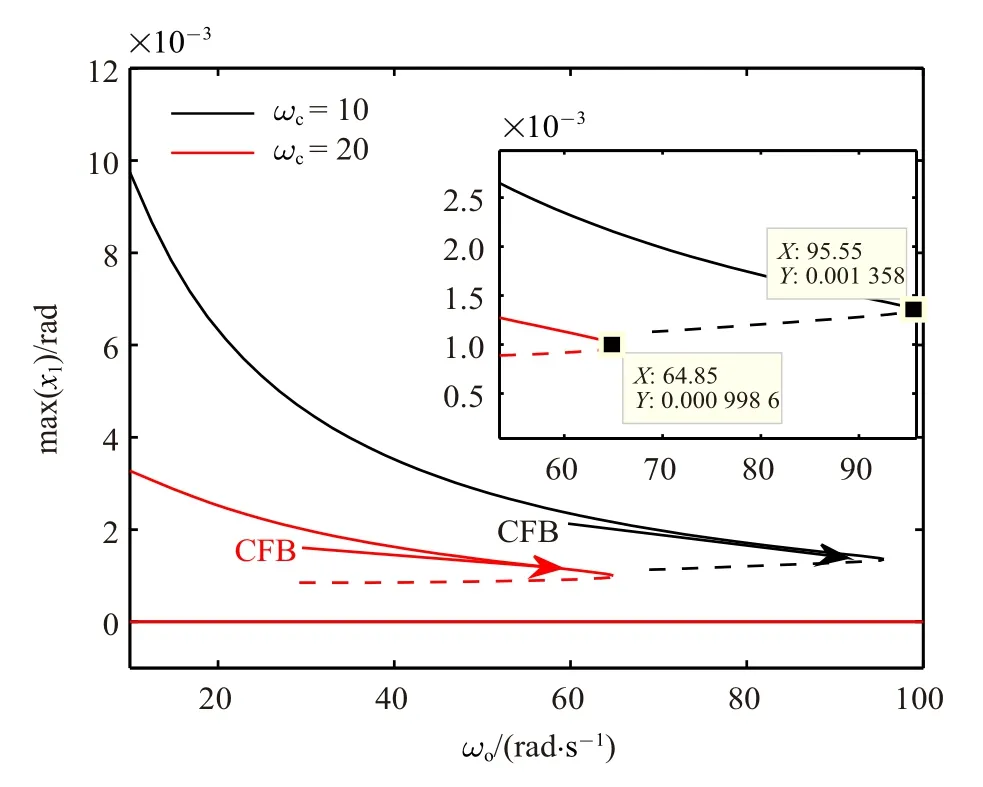
图8 β=2 时LuGre 模型系统分岔图(实线:稳定解枝,虚线:不稳定解枝)Fig.8 Bifurcation diagram for the LuGre model system with β=2(solid line:stable branch,dashed line:unstable branch)
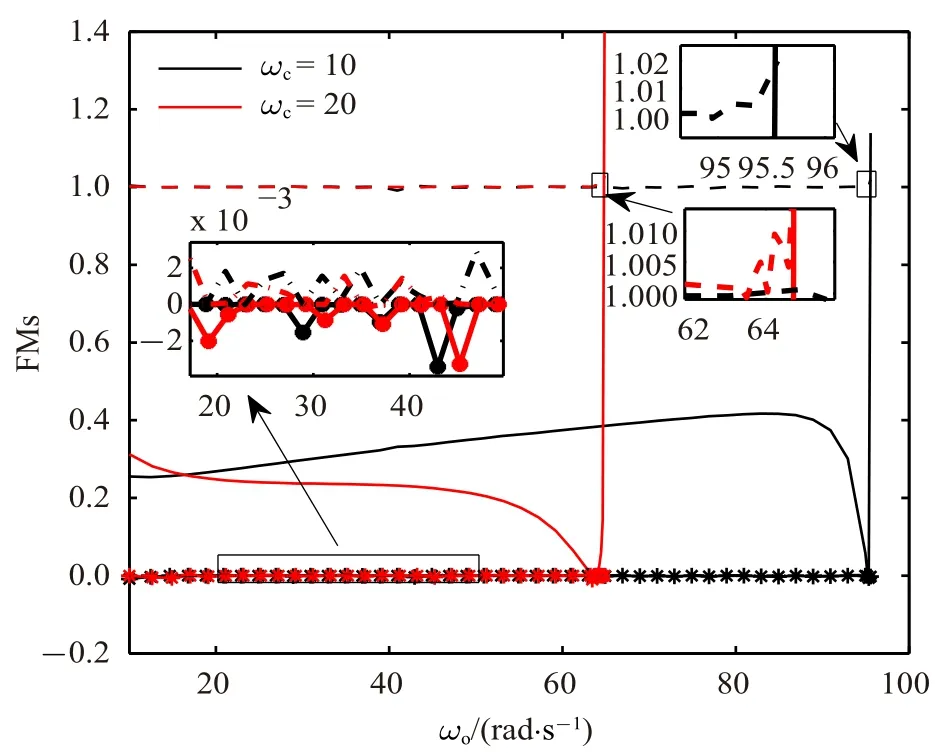
图9 β=2 时LuGre 模型系统稳定解枝的FMs(实线:FM1,虚线:FM2,点线:FM3,点划线:FM4,星实线:FM5)Fig.9 FMs of stable branch for the LuGre model system with β=2(solid line:FM1,dashed line:FM2,dotted line:FM3,dot dash line:FM4,solid line with star:FM5)
4.3 基于三阶ESO 的计算结果
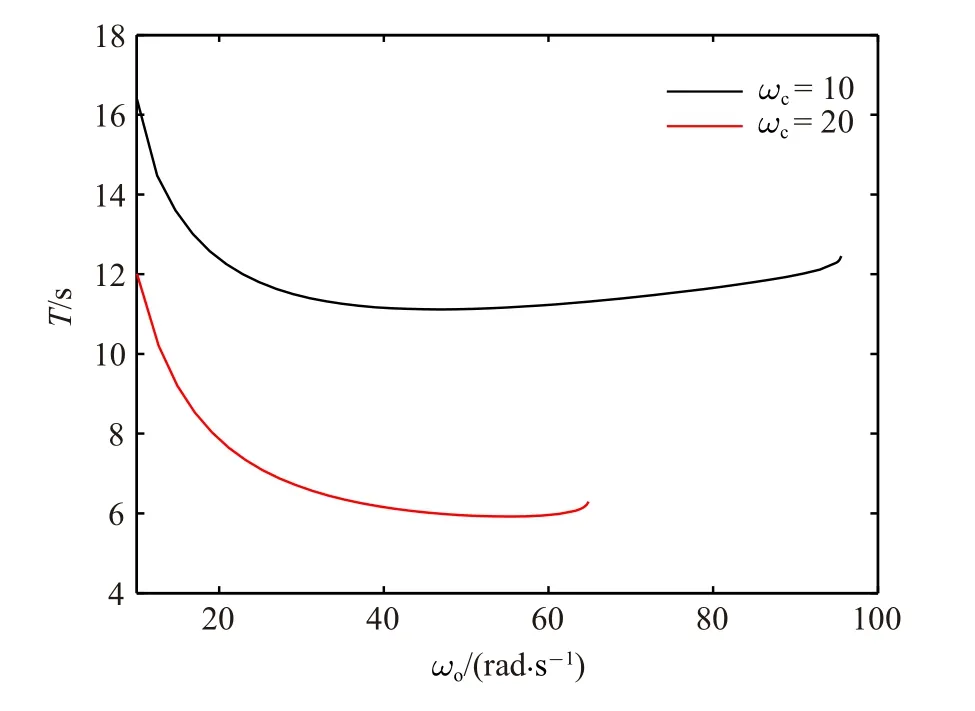
图10 β=2 时LuGre 模型系统的稳定极限环周期Fig.10 Period of stable limit cycle for the LuGre model system with β=2

图11 β=0.9 时LuGre 模型系统分岔图(实线:稳定解枝,虚线:不稳定解枝)Fig.11 Bifurcation diagram for the LuGre model system with β=0.9(solid line:stable branch,dashed line:unstable branch)
上述计算结果是针对二阶ESO 的,本文同样针对全阶ESO(三阶ESO)重复进行了4.1 和4.2 小节中的所有计算.计算结果表明,上述所得结论(摩擦力模型、参数、ADRC 参数对平衡点集以及周期解影响) 对于三阶ESO 仍然是成立的.由于闭环系统阶次升高一阶,切换模型系统和LuGre 模型系统分别多了乘子FM5和FM6,这两个乘子对应的是新增系统状态位置滤波的一阶导数,且都为接近于零的数.由于篇幅限制且所得结论是相同的,该部分结果没有在文中具体呈现.
4.4 二阶三阶ESO 性能对比
对于给定的摩擦力模型,降阶和全阶ESO 在极限环的存在性和稳定性、平衡点集的稳定性上面的结论是相同的.但是,二者在使用时效果还是存在一些区别.例如,在相同的ωc和ωo下,全阶ESO 相比于降阶ESO 的相位延迟更大,摩擦力补偿效果更差,极限环的幅值更大.为了取得和降阶ESO 相似的性能,全阶ESO 的ωo应该更大以补偿高阶次带来的延迟.因此,在相同的ωc下,全阶ESO 对应的B更大.为了公平地对两者进行性能对比,我们考虑两种闭环系统在其对应的下的鲁棒性能,即令摩擦力补偿效果相同,比较闭环鲁棒性能,研究哪一种阶次的观测器能够更好地解决抗扰性能和鲁棒性能之间的矛盾问题.我们将各种情形下的稳定裕度指标列在表1 中.其中,ESO2和ESO3分别表示降阶和全阶ESO,GM,PM,TM 分别代表幅值裕度、相位裕度和时延裕度.由于摩擦力模型是非线性的,在计算稳定裕度时仅考虑了滑动摩擦力,没有考虑零速附近的摩擦力非线性.由表1 可以看出,两个闭环系统的鲁棒性能比较相近,但是ESO2下的稳定裕度尤其是相位裕度指标更好一些.因此,在设计ESO 时可以优先选择降阶ESO.
对于切换模型,当β=2,ωc=10 时,ESO2和ESO3的分别为102.3 rad/s 和158.0 rad/s,此时两个ESO 的估计误差传函(L(d-ˆd)/L(d))的频率响应如图12 所示.可见,两个ESO 的频率响应十分接近,因此,其相应的极限环特性和稳定鲁棒性能也都是相近的.那么可以自然地弓申出一个问题,即在怎样的观测器参数化带宽关系下降阶和全阶ESO 之间的性能最为接近.首先考虑传统的-3 dB 定义的物理带宽,当两者的物理带宽相同时,降阶和全阶ESO 的参数化带宽ωor和ωof之间满足ωof=1.26ωor,显然此时不满足性能相似要求(表1 中的带宽关系).这里我们尝试用衡量线性系统相似性的ν 间隙度量[44]来计算两个ESO 参数化带宽之间的关系.两个线性系统P1和P2之间的ν 间隙度量定义为

表1 全降阶ESO 下的计算结果对比Table 1 Comparisons of calculation results for full-and reduced-order ESOs
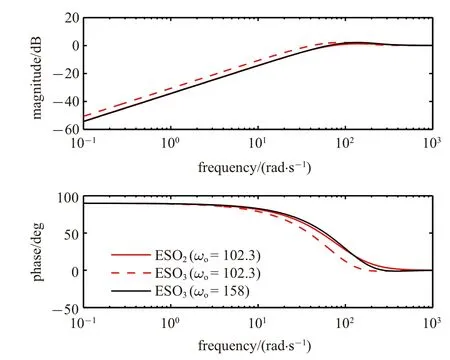
图12 全降阶ESO 的扰动估计误差的频率响应Fig.12 Frequency responses of disturbance estimation errors for full-and reduced-order ESOs

5 结论
本文得到以下四个主要结论.其中,结论(1) 和结论(2)总结了ADRC 阶次的影响,结论(3)和结论(4)总结了摩擦力模型和参数以及控制参数的影响.
(1)当设计一阶RESO 时,由于等效控制律即为PID 控制,已有的PID 控制下极限环振动结论直接适用.当设计二阶RESO 时,等效闭环系统增加误差滤波状态.当设计全阶ESO 时,等效闭环系统增加误差滤波状态及其导数.在这两种情况下,虽然阶次分别升高一阶和两阶,对于给定的摩擦力模型,闭环系统极限环的存在性和稳定性、平衡点集的稳定性的结论和PID 控制下的结论仍然相同,反映了ADRC 阶次对定性结论没有影响.

(4)对于连续的LuGre 模型,当β=2 和β=0.9时,系统都会出现CFB,即极限环可以通过增大观测器带宽消除.当β=2 时,结果和切换模型β=2 时结果十分相近.然而当β=0.9 时,结果和切换模型β=0.9 时结果正好相反.
下一步将对低速斜坡指令跟踪任务下的黏滑(stick slip) 振动展开研究.跟踪低速斜坡指令时,系统变为非自治系统,文中方法不再适用,其周期解求解将会更加困难,这也是未来的研究重点.
