瓜果自动施药机器人系统的研究与设计
2020-11-03林德颖
林德颖
(福建林业职业技术学院,福建 南平 353000)
中国是人口大国,同时也是农业大国。用科技影响农耕,提高各类作物与瓜果蔬菜的产量和质量,减轻劳动力,增加回报率是当下的研究热门。近年来,依靠国外进口与国内研发相结合,市面上涌现出了大量的农业机械与控制系统,如水稻、玉米等大面积种植的作物均可实现播种、施药、浇灌、收割等环节的全程自动化。而藤架类的瓜果蔬菜由于采用温室大棚种植,植株密集、垄距狭小、叶片稠密,大量病残叶片藏身于植株间隙之中,若采用通用施药机械从顶部喷洒液体,药剂难以直达患处,且易造成浪费。
基于上述问题,有团队设计出悬挂式的行走机器人,通过覆盖整个大棚的监控系统,实时监视瓜果状态,分析叶片病灶,机器人根据分析结果规划行走路径,通过顶棚事先搭建好的行进轨道到达施药处,降低喷嘴高度,调整喷嘴角度,达到精准施药的目的。该系统在试验田中获得了较好的成效,但对作物的种植密度、垄径规划都有严格的要求,且需要搭设轨道,一台设备无法在多个大棚中轮流使用,对于规模较小、非四季轮种的种植户而言,成本投入过高,难以推广。对此针对东南丘陵地区的种植散户,本研究设计了一种地面行走、高度可变、施药角度可以调节的自动对靶施药机器人。
1 机器人结构
瓜果施药机器人能够实现病残叶片全覆盖有几个必要的条件:首先是机械臂的运动范围能够覆盖到整颗植株;其次是小车的行进速度与视觉识别、喷嘴施药的速度要相匹配;最后是灵敏的距离感应和喷嘴压力控制。
1.1 机械手运动范围的研究
闽北地区多丘陵,多数农户的种植基地都被山林包围,受地形影响,中大规模的种植基地面积约在15~33.3 hm2。针对当地的种植情况,选择了黄瓜、茄子、丝瓜与苦瓜4 种作物作为试验对象,大棚种植的植株分布情况如表1 所示。
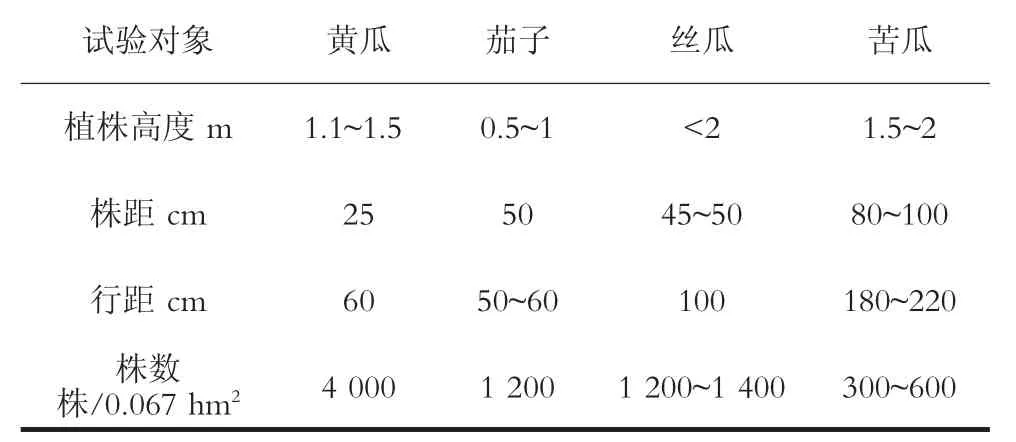
表1 4 种实验对象的植株排布情况表Tab.1 The plant arrangement of four experimental objects
由上表信息可知瓜果植株顶部高度在0.5~2 m,考虑到成长期的变化,农药喷洒的高度范围应设置在0.2~1.9 m,机械臂运行到顶端时,喷嘴与水平支架的夹角为15°,综合小车的底盘高度与喷射角度,机器人纵向运动范围在0.1~2 m,喷洒药剂可以覆盖到1.9 m 以下的各类植株。结合垄间距离,考虑到植株在成长过程中叶片会向外扩张,预留15 cm 的余量,将机械手的横向运动范围控制在20~60 cm,对于与苦瓜相类似的垄间距离较大的作物,另配加长喷头。机械臂结构上设置双边双轨道四喷头,同侧一喷头在机械臂作用下由上向下中压持续喷射;另一喷头轨迹相反由下向上作业,行进步调与摄像头同步,当检测到病灶时,对害病区域重点施药,双边同步进行,提升施药效率。喷洒部分机械臂结构如图1所示。
1.2 视觉模块与喷嘴的协同运动
藤架类瓜果的植株通常叶片大、密度高、自然下垂,为实现精准施药,提高农药利用率,本研究将喷头设置为倾斜状态,机械臂由上至下运行时,下方弹簧拉伸大,作用力也大,喷嘴向下倾斜;行程过半后,原本拉伸的弹簧张力减小,上方弹簧拉伸,喷嘴姿态变为向上倾斜。机械臂的位置越接近限位点,喷射角度越大。
运动部分设置了两台电机,一台只拖动机械臂滑板,在机器人行进过程中均匀地喷洒药水;另一台则同时拖动分别装有机械臂与摄像头的两块滑动板,部件5 为直接拖动,部件2 需经变速器减速后拖动。这样就保证了部件2 的行程小于部件5 的行程,使得机械臂运行至终点时,喷头的垂直线与摄像头所在位置的水平线相交于目标植株的立面上,相对位置如图2 所示。
(H2- H1)/(L- S)=tanα 时,H1 为摄像头距地高度,H2 为机械臂距地高度,L 是滑块轨道与待施药植株间的距离,α为喷头与水平线间的夹角。摄像头监测到叶片病灶后,将位置信息传送给CPU,当角度传感器读取到的信息满足条件(H2- H1)/(L- S)=tanα 时,喷头开启,对病害叶片重点治理。
1.3 小车结构设计
标准的种植大棚通常为矩形,沿长边方向开垄,垄间距离即为机器人小车的作业通道。考虑到作业地面为土积地面,小车后轮设置减震。同时为保障在狭小空间内转向的灵活性,前轮采用了万向轮设计。控制器、避障传感器、电源模块、电磁阀、水泵均安装在小车底盘上,底盘上方通过八枚支撑柱架高出二层,用于安放水箱,具体分布情况如图3 所示。
2 控制系统设计
机器人系统的核心控制部分选用了两片STM32 单片机,两机之间采用SPI 通信,以STM32H750VBT6 为主机,STM32F103ZET6 为从机,进行数据互联。其中主机完成摄像头的图像采集与数据处理、机器人关节的协调动作,从站控制机器人避障行进。在摄像头未发现植株叶片病灶的情况下,小车沿着作业通道以8 m/min 的速度匀速推进,依据四方传感器检测到的距离数据自动生成行动轨迹:当作业通道间距大于机身长度的1.6 倍时,机器人在通道尽头转弯掉头,按Z 字形路线行走;作业通道间距如不足机身长度的1.6 倍,则机器人原路退回通道入口后再进入下一个通道。如机器人行走过程中摄像头检测到病虫害叶片,则主机向从机发送中断申请,小车前行速度减至5 m/min,双喷头同时工作,监测喷头运动至目标点位时加大药剂喷量,杀灭虫害。机器人离开带病灶植株30 cm 后,行驶速度恢复正常。
2.1 避障系统设计
(1)小车行驶进入果蔬大棚入口后扫描左右距离传感信号,传感器选型为HC- SR04 超声波模块,采用TRIG 触发方式运行,为主动型测距。工作时,模块先对外发送8 个40 千赫兹的脉冲,并自动检测是否有信号返回,如接收到返回信号就从ECHO 口发出一个维系时长为t 的高电平,这里t 是模块从发出超声波到接收到回波所经历的时间。两测距模块的返回信号分别连接至从机的PA1/TIM2_CH2 与PA3_TIM3_CH2 管脚,将定时器TIM2 与TIM3 通道2 设为输入捕获,记录返回信号高电平时长后,计算t 与超声波速度的乘积,即可获得测试距离。对比左右传感器的测距结果,小车向距离更远的一侧偏转90°,并记录此时旋转方向为正方向(顺时针/ 逆时针),如遇到模块无返回信号,则重复检测,若再次无返回,系统将该方位默认为距离更远的一侧。
(2)小车转弯完成后直线向前行驶,行驶过程中实时比较左右方向的检测距离,依据检测结果调整机器人位置:若机器人在入口处左转,则重点监测小车左侧与大棚间距,保持恒定安全距离,小车右侧与植株间距不得小于20 cm;如机器人在入口处为右转,则重点检测小车右侧与大棚间是否保持安全距离,左侧与植株间距同样不得小于20 cm,头尾两侧预留不足75 cm 的大棚,小车不可行驶。
(3)首趟沿田垄垂直方向直线运行过程中,植株侧传感器每检测到一次距离突变,计数变量N 加1,初次检测到侧边距增量超过50 cm 时记为计数原点。随计数值的增加,不断叠算相邻两点间间距,如SN(1- 2)、SN(3- 4)、SN(5- 6)等,并求得平均值aver,当前置距离传感器检测到的距离小于1.2 倍aver 时,若植株侧间距大于1 m,则向植株侧转向;如距离达不到,小车倒退,直至条件满足后转向。转向过程中,四周与障碍物间距应保持在15 cm 以上。
(4)进入作业通道后直行,保持左右间距一致,在距离终点75 cm 处掉头,回到该作业通道入口;通道间距不足1 m,则按原路径退回通道入口处。如小车是转向回头,则在通道入口处沿反方向转向90°;若是原路返回,则在通道入口处沿正方向转向90°后,去往下一个通道。
(5)重复步骤(4)直至田垄垂直方向剩余路程小于1.2 倍aver 时,小车掉头回到大棚入口处,自动停机。
2.2 机器人对靶系统设计
在对靶的过程中及时获取靶标信息十分重要,需先行采集植株在各个生长阶段健康叶片的标本,量化处理后在系统内建档。机器人工作时,从图像中分别提取叶片颜色、形状与纹理信息,同健康叶片进行比对,偏差超过一定范围则认定为病变区,通过像素定位与摄像头滑块定位相结合,锁定施药目标,完成病虫害喷杀。
本设计采用STM32H7+OPENMV 的硬件组合,新一代STM32H750VBT6 配备Cortex M7 架构,最高480 MHz 工作频率,相较上一代STM32F7 系列产品,在运行速度与存储空间上都有极大的提升;OPENMV 是一种基于micropython驱动的视觉模块,集成了OV7725 摄像头,该模块优化了机器视觉算法,更适用于MCU,二者相配合,保障了图像的处理速度。
OPENMV 使用LAB 色彩空间,及亮度- 色轴(绿- 红)-色轴(蓝- 黄),每个颜色的阈值包含了(minL, maxL, minA,maxA, minB, maxB)6 个数据,研究通过对图像进行逐行扫描,并依据一定的算法标记叶片颜色异常区域,同时统计每一个区域所包含的像素个数,再用标尺转换就可以得到想要测得的区域面积,剔除面积过小区域之后,余下的便是植株感染病虫害后的表征区域,至此完成色域的识别,流程如图4 所示。
视觉模块完成病灶识别后,主机向从机发出减速申请,小车慢行。机械臂向目标位置移动,电磁阀动作,打开喷头开关,对病害区域高压喷洒药剂,机械臂纵向离开目标区域5 cm 后启动回程,直至小车驶离目标区域,主机关闭电磁阀进入待机状态。
3 结束语
瓜果自动施药机器人是针对大棚爬架类果蔬设计的一款施药机器人,具有体积小、灵活度高、自适应性强、节省药剂的优点。独有的万向轮设计保证了机器人在狭小的作业通道内灵活转向;变化的喷头角度有利于药剂穿过层叠叶片到达患处;同时结合视觉识别技术,可实现对症、控量地精准施药。试验表明,本研究具有较好的实用性和稳定性,与全面覆盖型的喷药系统相比在节省用药和精准施药方面具有一定的优势,但在工作速度上仍有较大的差距,需要在后期的研究中继续改进优化。
