联网自动车环境下的信号交叉口优化方法研究
2020-11-02李磊单亚男李树彬孔祥科
李磊,单亚男,李树彬,孔祥科
(1.潍坊市规划编制研究中心,山东 潍坊 261000;2.山东建筑大学 交通工程学院,山东 济南 250101;3.山东警察学院 交通管理工程系,山东 济南 250014)
随着社会经济的快速发展,我国机动车保有量急剧增加,交通拥堵及其衍生的各类问题对日常生活产生了极大的负面影响,已成为城市发展的主要障碍。联网自动车(connected autonomous vehicles,CAVs)技术指通过传感器技术、无线传输技术、数据处理技术和数据集成技术的互补合作,实现云环境下驾驶员与车辆、车辆与车辆、车辆与系统的交互,为交通参与者提供周边交通状况和交通管理中心决策的实时信息,CAVs的出现为解决交通拥堵问题提供了新的契机。在完全实现联网自动车前,常规车、CAVs这种新型混合交通流将长期共存[1]。基于不同等级的自动车具有不同通信能力这一共识,Talebpour等[2]分析了不同CAVs的市场占有率对交通流稳定性的影响。新型混合交通流中联网车的密度和通信范围是车联网通信的重要影响因素,研究者对其采用不同的分析方法进行研究,并提出有效的控制策略以提高新型交通系统性能[3-5]。同时,研究者从交通控制的角度分析了CAVs对交通系统的影响。Liu 等[6]提出了单车燃油消耗的最优控制问题,推导出了最优的车辆轨迹,提出了一种新的交通流平滑控制策略,该策略可显著降低平均油耗。Kamal等[7]设计了一个车辆驾驶系统,通过预测下游交通状况来缓解交通拥堵。Li等[8]从理论上分析了CAVs交通流模型并对其进行适当的改进,改进后的模型能够估计由交通波动而产生的油耗和排放,并提出新技术下的交通控制策略。Alvarez等[9]设计了与状态相关的安全区域,车队内的距离在控制范围之内便可使车队安全运行。Darbha 等[10]定量研究了车联网技术对自动驾驶汽车车头间距的影响,并分析了前车信息与系统串稳定性之间的关系。
CAVs环境下通过车队轨迹控制可更有效地提高路网通行能力,尤其是交叉口处CAVs通过协同控制,以最大速度通过信号交叉口使其通行能力最大化。Zhou 等[11]提出了一种简洁的启发式算法来控制 CAVs 环境下公路上的车辆轨迹,该算法将车辆的运动轨迹划分为若干段,并对每一段进行解析求解。基于这一理论,Ma等[12]提出了一种控制车队轨迹的整体优化方案,目标是获得交通系统和环境的最优交通控制策略。Li等[13]从分析连续时间规划问题的可行条件入手,提出两个重要边界轨线问题的解析解,并在此基础上进一步提出离散模型,通过数值模拟验证了所提方法的有效性。CAVs的出现,就像20世纪马车运输时代出现汽车一样,具有划时代的意义,将对我们现有的交通运输系统产生重大影响[14]。
目前适合中国国情的道路通行能力研究尚未形成系统的方法,缺少相关的模型和方法体系。《公路工程技术标准》[15]中所采用的通行能力,基本上沿用了国外的一些研究成果,而中国目前的交通组成、管理方式等方面与国外有着明显的差别,因此其不能反映中国道路交通的实际运行特性。故而,需要从微观入手,研究具体交叉口的通行能力模型和分析方法,尤其是为了适应未来CAVs环境,需要仿真模拟精准的车辆运行环境。
因此,本文提出了两个信控交叉口通行能力估计模型,其一为最小延迟模型,该模型通过最小化带有触发式控制的孤立交叉路口临界交通流的延迟,根据自由流速得到估计的绿灯时间和周期长度;另一个模型是混合模型,该模型是通过估计静态队列模型的排队服务时间,从而计算交叉口的总延迟。尤其需要说明的是当车流混入CAVs后可能会出现随即延迟,在计算时本文采取模拟计算,取CAVs比例作为随机延迟的值。
1 符号定义与概念
1.1 符号定义
本文使用的主要符号及其说明如表1所示。
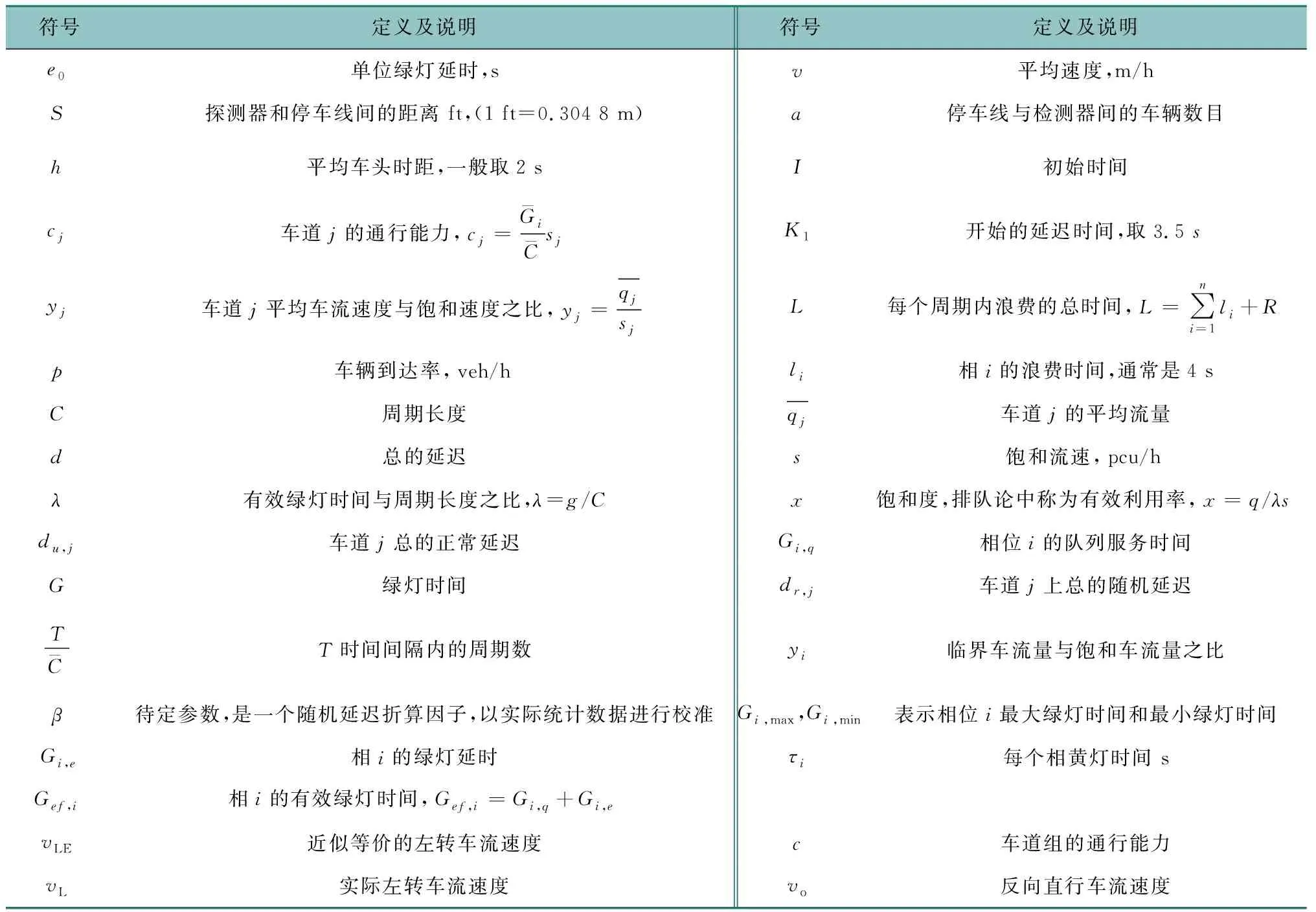
表1 符号说明表Table 1 Symbol description
1.2 基本概念
(1)单位绿灯延时:指在该绿灯相中能够延长的时间,取决于到达车辆平均速度和车辆检测器与停止线之间的距离,可由式(1)得出。
(1)
(2)初始时间:允许红灯期间在检测器和停车线之间的车辆足以全部通过的时间。这个时间依赖于排队车辆、平均车头时距和开始的延迟时间,计算如式(2)所示。
I=ha+K1。
(2)
(3)最小绿时:是在任何交通相中应该提供的最小的绿灯时间。在最基本的设置中,最小绿灯时间为初始间隔与单位绿灯延时的和。这由交叉口的交通需求而定,通常情况下取25~40 s。
(4)最大绿时:是在一个冲突需求情况下,一个相所能得到的绿灯时间的最大值。根据交叉口交通条件而定,通常情况下取30~60 s。
2 信控交叉口通行能力估计模型
2.1 最小延迟模型
2.1.1 假设条件
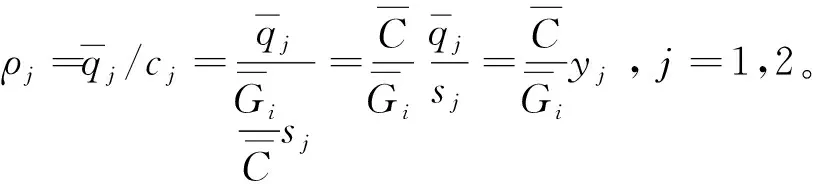
(1)所有车道均处于非饱和状态,即:

(2)在红灯时间开始排队,绿灯时间排队全部消散;队列消散后,交通流以连续的方式到达。
2.1.2 Webster延迟模型
Webster延迟模型是最小延迟模型的原始模型,即最小延迟模型由该模型优化交通系统运行效率得到,模型如式(3)。
(3)
2.1.3 总的延迟
总的延迟可分为总的正常延迟和总的随机延迟。
d=du+βdr。
(4)
2.1.3.1 总的正常延迟
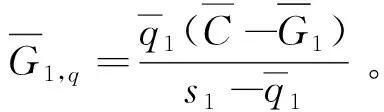
车道1总的正常延迟如式(5)所示:
(5)
(6)
同理,车道2总的正常延迟:
(7)
因此时间间隔T内,临界移动车辆的总的正常延迟为:
(8)
2.1.3.2 总的随机延迟
总的随机延迟计算如式(9)所示:
(9)
mind=du+βdr,
(10)
式中,Gi,min,Gi,max分别表示相位i最小绿灯时间和最大绿灯时间。将式(9)~(10)应用于n相位交叉口
(11)
2.2 混合模型
混合模型是HCM2000能力估计模型的一种改进,包括2个模型:一个估计队列服务时间的模型,一个估计绿灯延长时间的模型。估计队列服务时间基于交叉口的车流速度,而估计绿灯延长时间基于车辆到达时间的分布情况。
为了考虑随机到达车辆,在计算时将相i的队列服务时间乘上一个因子fq,i,如式(12),得到调整后的绿灯时间(队列服务时间)为式(13)。
(12)
(13)

绿灯延时是一个长于允许间隙的期望等待时间,可以由车头时距的分布给出,这个分布通常服从负指数分布。绿灯延时依靠车道的流速、车道上检测器的设置参数以及控制者的设定。相i的绿灯延时为:
(14)

计算相i的实际绿灯时间,如下:
Ga,i=Gef,i+li-τi。
(15)
周期长度如下:
(16)
2.3 模型求解
上述两个模型都是带有约束的非线性优化问题,可由任何一种非线性规划的方法求解,如Frank-Wolfe算法、混沌算法、修正投影算法等。绿灯时间和周期长度已经确定时,用下式来计算车道组的通行能力。
(17)
在通行能力估计过程中,针对左转车流速度的处理,将左转速率转换为近似等价的直行速率,由此确定一个车道是否可以同时允许直行和左转。当vo/s等于或大于1400/1800时,vLE就没有意义。vLE计算如式(18)所示。
(18)
上述两个模型会根据CAVs环境下的车流变化而变化,自动车的加入会使得交通流趋于好的秩序,增加车流的稳定性。车流的传播规律也较容易获得,因而理论上此时的通行能力会逐步增大。
3 数值算例
3.1 数值计算
通过实际调研获得济南市某信控道路交叉口,两相位,信号周期为75 s,黄灯时间3 s,各相全红时间3 s,绿灯间隔时间为6 s,没有专用左转相位。头车启动损失时间取3 s,通过实际调查和初步计算得到的数据见表2。
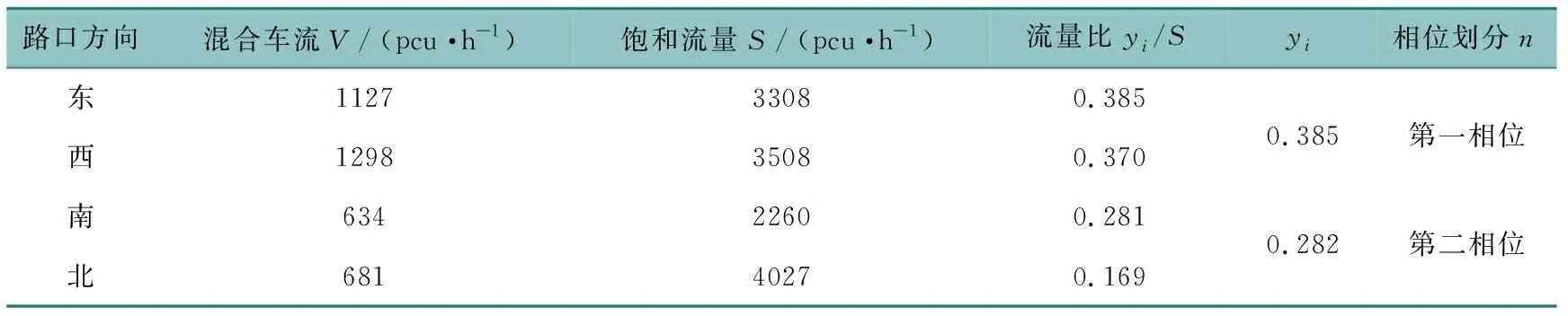
表2 路口流量统计及基本计算表Table 2 Intersection flow statistics and basic calculation
由已知条件求得,每个周期的总损失时间为12 s。在一个周期内,根据最小延迟模型和混合模型求得的周期长度和各相位有效绿灯时间如表3所示。计算信控交叉口不同信号周期下的交叉口车辆平均延误和交叉口通行能力,进行对比分析,见表4。
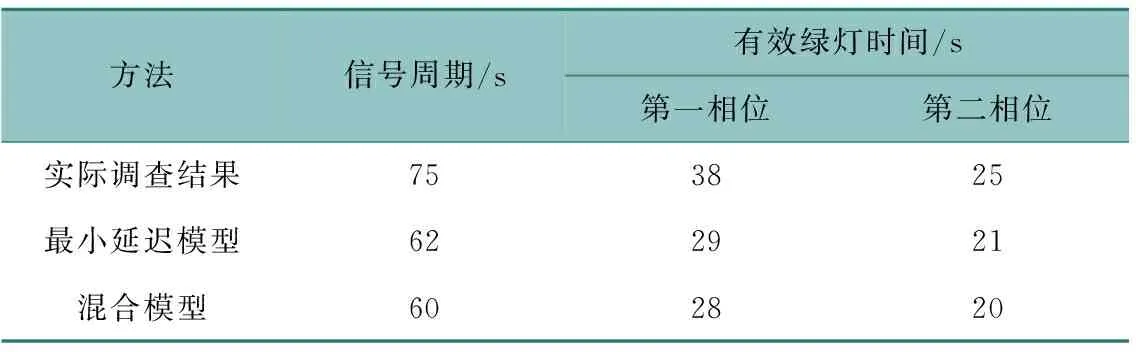
表3 计算结果Table 3 Calculation results
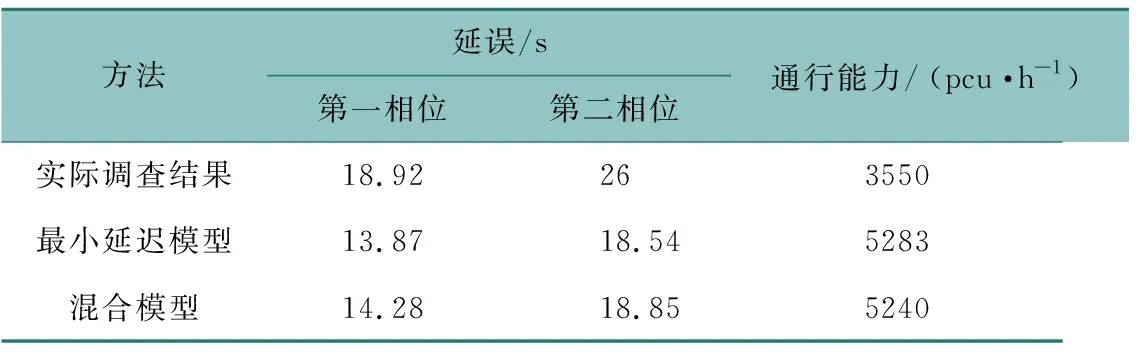
表4 不同模型对比Table 4 Comparison of different models
由计算结果可知,最小延迟模型和混合模型与实际调查的结果相比,减小了车辆通过交叉口的延误时间,信控交叉口的通行能力有了很大提升。传统的信控交叉口信号配时方案有较大的局限性,最小延迟模型和混合模型更具实用性,能够更好地适应未来CAVs环境下的交通特性。
3.2 仿真模拟
将模型运用到本课题组开发的智能交通仿真软件DynaCHINA中[16],每个进道口上游端点作为一个交通小区,流率按照上述数值计算设置,其他参数设置以及交通流模型参数采用文献[16]中的设置,仿真时间为15 min 一个时间间隔,共计仿真20个时段,即4 h,仿真结果分别统计4个进口路段上的速度、密度,流量,如图1所示。
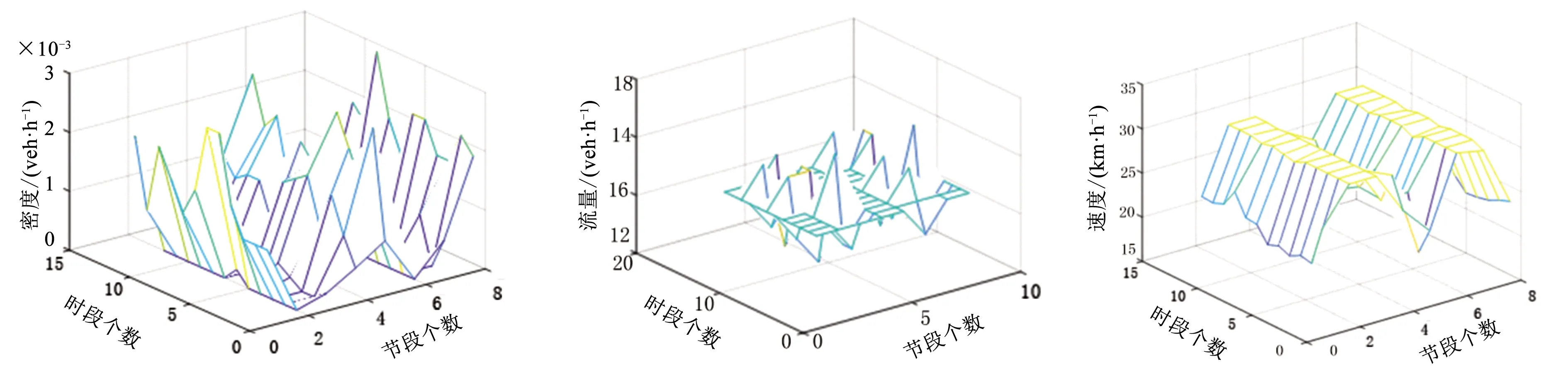
图1 4个进口路段上每个时段内平均密度、平均流量和平均速度Fig.1 Average density, flow, and speed per period at the four entrance segments
从图1可知,相比于调研数据密度分布较为均匀,这说明了CAVs环境下车辆之间部分协调,避免因拥挤抢道等原因导致的通行能力下降,从而车辆可以有序地通过道路交叉口。从速度来看,车辆速度平缓且有大幅度提升,说明车辆可以快速通过路口。从流量情况来看,总通行量也有了较大的提升,这说明CAVs通过自身的协调可以极大地改善交通环境,提高路口的通行能力,从而增加车流运行的稳定性。
4 结论
本文研究了CAVs环境下,通过最小化交叉路口的总延迟得出绿灯时间,并根据流速得出周期长度,由此提出了最小延迟模型;通过改进HCM2000能力估计模型,提出了混合模型。通过算例可以看出,该模型减少了道路的延误,提高了道路的通行能力,能够更好地适应未来CAVs环境下的交通特性。
但是,由于实际环境中车辆行驶的随机性大,会受行人、非机动车等多因素干扰,因此,需要对车联网环境下新型交通流的运行特征做进一步地研究。